
单兵巡飞弹弱弹道环境智能感知系统
2021-02-18 11:17殷志臣娄文忠冯恒振
探测与控制学报 2021年6期
何 博,殷志臣,娄文忠,冯恒振
(1.北京理工大学机电学院,北京 100081;2.陆军研究院通用装备研究所,北京 102202)
0 引言
单兵巡飞弹是一种可以实现多模式发射及投放的武器系统,具有情报侦察、目标指示、信息中继、区域封控、精确打击和毁伤评估等特征[1-4]。作为一种小型高智能武器系统,引起了美国、俄罗斯、以色列、英国、德国等国家的广泛关注,先后加入了单兵巡飞弹的发展行列。单兵巡飞弹的测试面临的挑战主要是更小的体积空间,识别更弱的弹道环境和在与高度信息交互的过程中可靠地感知弹道环境。一般单兵巡飞弹的体积较小,这就要求巡飞弹药弹道环境感知系统所占体积尽可能小[5-6]。单兵巡飞弹整个弹道环境微弱,其“弱”量级表现为最大过载为百g量级,且持续时间短暂,为ms量级,弹体全程不旋转,故这种处于弱环境力的弹药测试研制过程中,对于弹道环境的感知变得尤为重要。必须通过感知微弱环境力的变化实现保险的可靠顺序解除[7-9],故提高弹道环境检测精度成为单兵巡飞弹测试研制过程中的重要组成部分[10-11]。国内外对此展开了技术研究和型号研制,以美国“弹簧刀”单兵巡飞弹为代表。俄罗斯、德国等国也对单兵巡飞弹进行了大量研究,并服役于作战部队,通过不断地研究更新,实现了组网以及对目标的精确打击和高效毁伤,但是弹道环境感知精度不高[12-14]。我国的单兵巡飞弹研制起步晚,技术力量主要集中于巡航时间、控制算法和毁伤效能[15-18],并且用于巡飞弹安全解除保险的弱环境力感知系统研究滞后。
针对单兵巡飞弹具有弱弹道环境的特点,无法根据剧烈环境变化实现各级保险有效解除的问题,设计了用于单兵巡飞弹微弱弹道环境感知系统。
1 弱弹道环境感知系统设计
单兵巡飞弹药弹道环境感知系统由环境感知模块和高可靠存储模块组成。
1.1 环境感知模块设计
智能感知发射环境模块用来感知弹道力学环境。本模块由两支MEMS加速度传感器组成,采样周期为200 Hz,芯片尺寸为5 mm×3 mm×1 mm,用于可靠感知发射阶段加速度过载。图1为环境感知模块电路设计。

图1 环境感知模块电路Fig.1 Environment sensing module circuit
1.2 高可靠存储模块设计
针对单兵巡飞弹的弹道飞行环境,设计了具有高可靠性的环境过载存储系统,以防止发生飞行过程中数据丢失等问题。高可靠存储模块控制电路如图2所示,采用高可靠非易失性存储芯片实现弹道数据存储,芯片尺寸为5 mm×5 mm×2.5 mm。
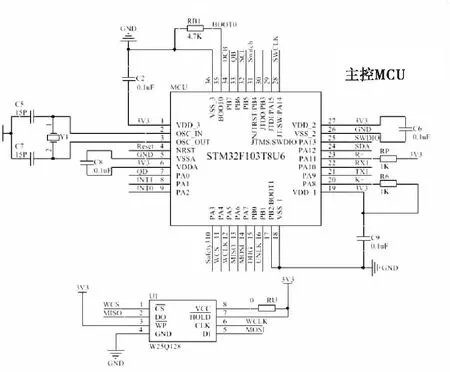
图2 高可靠存储模块电路Fig.2 Highly reliable memory module circuit
2 无信息交互下弱环境感知试验
无信息交互即弹载计算机和引战系统无持续相互通信(询问状态和反馈状态),仅测试感知系统对微弱环境力的感知精度和感知、存储可靠性。
2.1 离心过载试验
地面过载测试系统搭建在离心环境下,以模拟单兵巡飞弹的整个弹道环境。为了完整地模拟飞控系统的工作状态,设计了模拟飞控上位机平台,主要功能包括:系统上电后发送状态自检指令、获取当前状态、实时存储和输出离心过载。
地面全系统模拟试验平台试验系统组成为:测试样机、模拟主控、离心试验控制平台(如图3所示)、离心试验系统(如图4所示)。

图3 离心试验控制平台Fig.3 Centrifugal test control platform

图4 离心试验系统Fig.4 Centrifugal test system
试验流程如下:
1) 系统上电,离心测试控制端向测试系统发送采集过载信息指令,测试系统向控制端反馈接收到指令状态,并标记相应标志位;
2) 离心试验设置,设置离心加速度为50~180g,梯度为10g,每个梯度持续时间10 s;
3) 离心旋转开始,高可靠非易失性存储芯片响应过载信息存储指令,并实时存储离心过载信息,测试系统通过串口通信方式将实时感知的过载信息输出到离心试验控制平台。
控制端通过通信接口将接收到的过载信息实时打印,测试得到:系统控制端接收到的离心过载值与时间关系如图5(a)所示;高可靠非易失性存储芯片采集的离心过载值与时间关系如图5(b)所示。

图5 离心过载随时间变化Fig.5 Centrifugal overload vs. time
由图5可以得到,系统控制端接收的加速度信息与高可靠非易失性存储芯片存储的信息保持一致,测试时间为425 s,两路信号采集样本303 571个,测试点加速度幅值误差最高为0.3%,每一级离心过载阶梯过载值和持续时间完整,控制端接收的离心过载数据和非易失性存储芯片存储的离心过载数据与离心机提供的过载信息吻合,证明了所设计的微小型弱弹道环境感知系统的精确性及存储过载信息的可靠性。
2.2 冲击-离心过载试验
为满足高动态环境下,弱环境感知系统的生存可靠性及数据准确性,开展了冲击-离心过载试验。
冲击试验装置如图6所示,利用马歇特锤对测试样机进行冲击试验,对感知系统施加的冲击过载如图7所示。
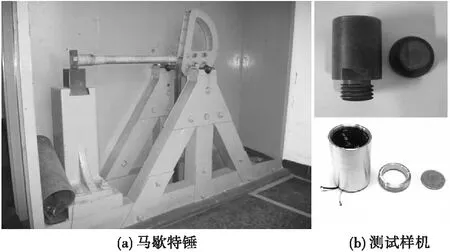
图6 冲击试验装置Fig.6 Shock test device
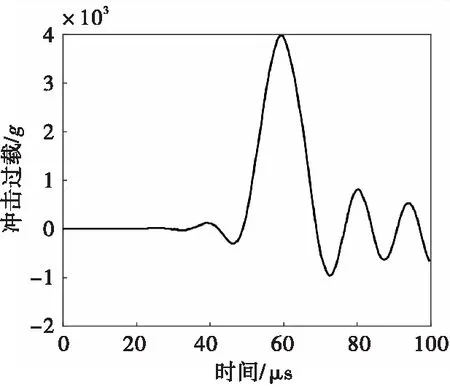
图7 马歇特锤冲击过载Fig.7 Shock overload of the Machete hammer
由图7可知,感知系统经历了峰值达4 000g,持续时间为20 μs的冲击过载。将经历高冲击过载试验后的感知系统再次进行离心过载试验,并同时通过控制端实时接收和高可靠非易失性芯片存储两种方式进行感知微弱环境力变化,得到经历了高冲击后的离心过载数据,如图8所示。从图8可以得到,系统控制端接收的加速度信息相比高可靠非易失性芯片存储的信息有微小时间滞后,这是由于软件的逻辑,在感知到离心过载后,先进行存储进高可靠非易失性芯片,再进行串口通信传输到系统控制端,导致了一定时间的滞后,但忽略时间的滞后,感知得到的离心过载信息是高度一致的,并且与离心机提供的过载信息吻合,说明所设计的弱弹道环境感知系统,在经历高动态环境的冲击后,仍具有感知的高精度和感知、存储的高可靠性。

图8 冲击后离心过载测试Fig.8 Centrifugal overload test after shock
3 高度信息交互下弱环境感知测试
在实际高智能的单兵巡飞弹中,弹载计算机时刻都在向引战系统发送自检指令,引战系统收到自检指令后,也必须立即向弹载计算机反馈自身的状态。即引战系统的MCU每隔一段时间就会处理通信,而无法正常感知并存储弹道环境,并且存储进芯片的过程也是一个耗时的过程,在实际发射过载只有十多毫秒的时间窗里,很容易丢失环境信息,以至于无法完成引战系统的解除保险。
在通信无法改变的情况下,为了获得更多的环境信息,将感知就存储的逻辑变为感知、暂存MCU到统一存储,在这样的逻辑下,正常感知过载间隔为1 ms左右,能够满足在发射短时间窗里连续感知到发射过载阈值才能确定自身环境的需求。
在装无人机载制导弹药进行联合测试试验前,利用模拟上位机以25 Hz的频率一直向MCU发送询问指令,MCU接到指令后立即向模拟上位机进行状态反馈,在此高度信息交互的状态下,进行连续敲击试验。 图9为不同方位连续敲击(敲击5次)试验后,读取高可靠非易失性芯片中存储的三轴过载信息。从图9(a)中可以看到,在X轴方向,有4个波峰,但还有最后一个波峰(约在4 365 ms处)并不明显;从图9(b)和图9(c)中可以明显看到敲击连续5次敲击得到的5个过载波峰。可以看得,每次敲击峰值持续的时间为1.186 ms,是能够可靠地感知并存储到瞬态的冲击过载。
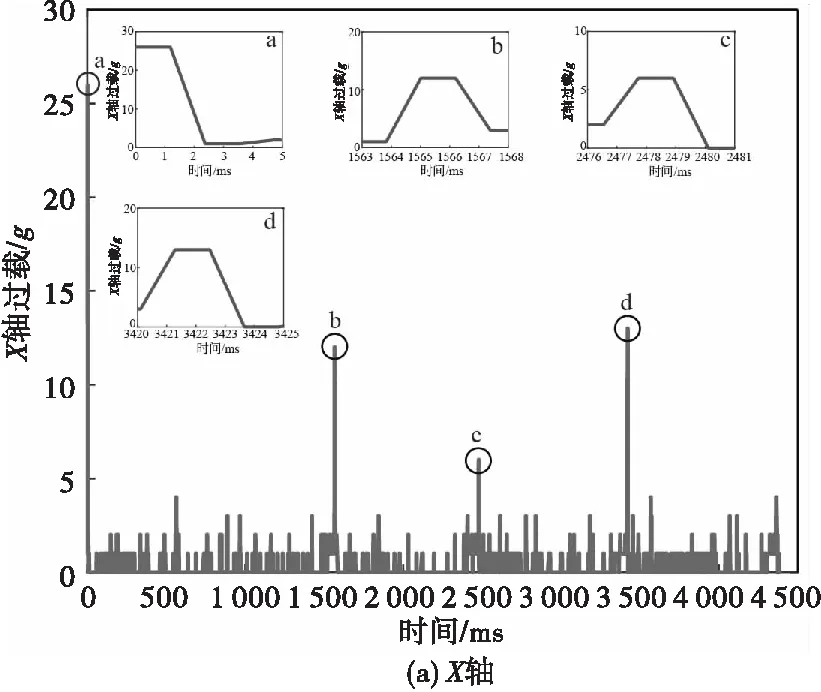
图9 连续敲击测试三轴过载Fig.9 Continuous tapping test for triaxial overload
将弱弹道环境感知系统搭载到单兵巡飞弹进行联合试验,无人机载弹药的飞控计算机以25 Hz的频率向感知系统的MCU连续发送状态自检指令。记录开始的阈值设置为80g,即感知到的过载信息从80g后开始被MCU记录,并在记录结束后,统一发送到可靠非易失性芯片中存储。
发射飞行试验结束,所得到的发射三轴发射过载曲线如图10所示。
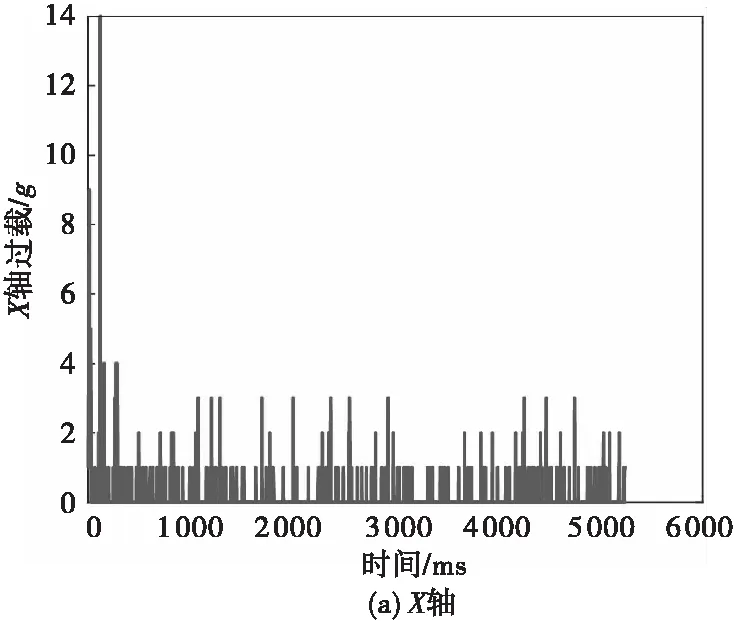
图10 发射测试三轴过载Fig.10 Launch test triaxial overload
从图10(a)和图10(b)中看到,发射过程中,单兵巡飞弹有一定的振动;从图10(c)可以看到,系统感知到了相对其他两轴更大的过载信号,所以Z轴为无人机载弹药弹轴方向,在开始记录后,过载在11.38 ms达到MEMS加速度芯片感知过载的阈值(200g),在11.38 ms到22.06 ms时都达到或超过了200g的过载,共感知并存储到了10次最大过载信息。从达到80g阈值开始存储,到发射过载降至50g,共感知并存储到了24个数据点(中间4~10 ms为一次通信中断)。说明所设计的微弱弹道环境感知系统在高度信息交互的环境下准确且可靠地感知并存储了微弱环境过载信息,并且适用于多次连续判断是否达到解除保险阈值过载,提高了引战系统的安全可靠性。
4 结论
本文设计了用于单兵巡飞弹的微小型、高精度、高可靠的弱弹道环境感知系统,并进行了试验验证。该系统中采用MEMS加速度传感器和高可靠非易失性存储芯片实现微弱弹道环境的实时精确感知和实时可靠存储。在无信息交互下,利用高速离心机进行了地面功能模拟试验,利用马歇特锤使整个系统经历高动态高过载冲击后,再次离心测试,验证了感知系统准确性及可靠性。最后与单兵巡飞弹联合进行了高度信息交互下的发射飞行测试,验证了感知系统在高智能的巡飞弹药中,能够准确和可靠的感知过载,可以使单兵巡飞弹多次连续地判断是否达到解除保险阈值过载,提高了引战系统的安全可靠性。
猜你喜欢
弹道学报(2022年3期)2022-10-08
装备环境工程(2022年6期)2022-07-09
小哥白尼(趣味科学)(2022年3期)2022-06-09
宇航计测技术(2021年6期)2021-04-19
兵器知识(2020年8期)2020-08-12
农家科技下旬刊(2017年8期)2017-11-13
农家科技(2017年7期)2017-08-15
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
