
无人机倾斜摄影大比例尺地形图关键技术与质量评价
2021-02-15 07:53:12喻艳梅
经纬天地 2021年6期
喻艳梅
(湖南工程职业技术学院,湖南 长沙 410151)
0.引言
地理空间信息是国家发展的基础,数字化地形图在城市规划、智慧城市、基础设施建设、灾害应急处理等各个领域都发挥着至关重要的作用,可以促进国民经济快速发展[1]。在部分工程项目实施过程中,对地形图的精度要求较高,如,地震、滑坡等自然灾害发生时,为及时开展有效的救援工作,需快速绘制灾区大比例尺地形图,此类情况对绘图的生产周期、精度质量、数据采集等工作提出了很高的要求。面对此类任务,传统的数字化测图往往无法及时完成。现阶段,航测技术发展迅速,其中倾斜摄影测量技术在传统航测的基础上,融合了多视角摄像传感器,可从垂直和倾斜五个不同角度进行影像数据的采集。同时,飞行器平台搭载着其他数据传感器,可实现航向、航高、重叠度等姿态信息的采集,结合少量的地面控制点,进行空三测量处理,实现影像数据解算处理,通过软件实现测区三维模型构建,进一步完成4D(DRG数字栅格地图、DLG数字线化图 、DEM数字高程模型、DOM数字正射影像图)产品快速生产。
本文从倾斜摄影测量技术大比例地形图生产过程中所涉及的关键技术出发,针对倾斜摄影影像匹配、非量测相机畸变改正进行了探讨,提出了相应的解决方案,对三维模型及大比例尺地形图进行了质量评价,通过实验进行验证,结果显示该方案可实现大比例尺地形图快速、精确绘制。
1.关键技术
1.1 倾斜摄影测量地形图生产技术路线
通常将五镜头相机搭载在无人机平台上,多角度获取地面影像数据,以倾斜影像为主要数据,利用数据处理软件,结合无人机平台的其他传感器所获取的相关影像方向、位置等信息,进行空中三角测量、多视角影像匹配、密集匹配、构建三角网、数字表面模型生产、纹理映射等过程处理,实现三维实景模型构建。利用实景三维模型结合EPS软件进行大比例尺地形图绘制,实景三维模型可从多个视角进行观察绘图,细节全面,测量坐标方便,降低了外业调绘工作难度,工作效率高。
1.2 非量测相机检校
倾斜摄影无人机平台体积质量较小,考虑生产实际和成本,通常搭配非量测数码相机。受不确定因素影响,此类相机通常存在镜头畸变问题,当镜头畸变较大时,会造成设计像点位置与实际像点位置发生偏移,影响后期空三解算与影像匹配,增大解算误差,降低数据精度[2,3]。
相机镜头畸变类型(如图1所示):无变形、径向畸变、像主点畸变和切向畸变。

图1 畸变类型
受相机镜头畸变影响,在实际数据采集过程中,首先需进行倾斜无人机相机镜头检校,求解相机内方位元素及畸变参数[4]。考虑直接线性变换法(DLT),不需要内外方位元素,计算简单,精度高。利用该方法进行相机检校,主要原理是通过摄影测量共线方程原理,对物点坐标与像点坐标进行直接转换。中心投影共线方程如式(1)所示:
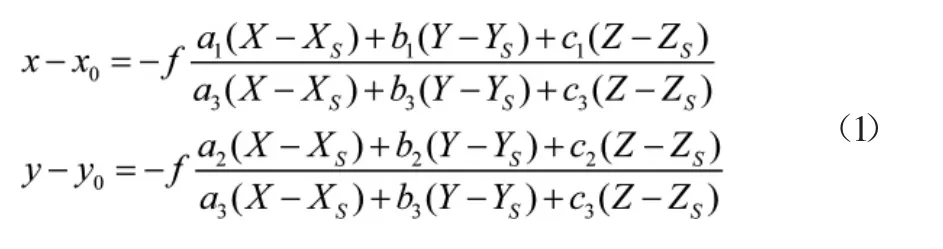
式(1)中,(x,y)为像点坐标;(x0,y0)为像主点坐标;f为相机的主距;(X,Y,Z)为像点所对应的地面点在物方空间的三维坐标;(XS,YS,ZS)为摄站点在物方空间的三维坐标;(ai,bi,ci)为相关系数。
考虑物镜偏心、径向、仿射畸变改化公式,如式(2)所示:

式(2)中,pi,ki分别为物镜的偏心畸变差系数和径向畸变差系数;mi为仿射变换系数为向径。
由上式可知:在相机检校过程中至少各需要8个相对的控制点实现解算。
1.3 多视角影像密集匹配
倾斜摄影测量技术可通过多镜头从不同方向对地形地貌进行全方位信息采集,因此倾斜影像可提供大量的冗余信息,利用多视角影像匹配技术,将影像相互关联,进行密集匹配处理,生成密集点云,为后期三维模型精度提供了保障[5]。基于物方面元的多视立体匹配算法(PMVS,Patch-based Multi-view Stereo)以面表示地形物方点,结构(如图2所示),面元中心为坐标c(p),法向量为n(p)。

图2 面元结构
PMVS算法主要分为以下三个步骤(如图3所示):
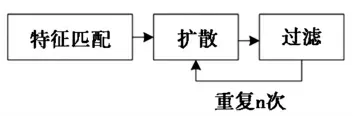
图3 PMVS算法流程
1.3.1 分别利用Harris算子和DOG算子提取特征点,利用核线几何约束条件确定特征匹配点。
1.3.2 利用前方交会原理构建物方面元,并利用共轭梯度算法,获取最优面元,作为种子,为下一步扩散做准备。
1.3.3 通过相邻面元进行逐步扩散,当面元全部覆盖地表时,即可得到密集点云。扩散过程中需过滤筛除误差较大的点,多次重复实现密集点云获取(如图4所示):

图4 PMVS算法面元扩散方式
2.测区实验
2.1 技术路线
基于倾斜摄影测量技术的大比例尺地形图绘制流程(如图5所示),主要包括前期收集、测区地理概况分析、航线航高设计、像控点布设、像控点测量、数据采集、空三解算、实景三维模型构建、地形图绘制、精度检核及成果提交。

图5 倾斜摄影测量地形图生产流程
2.2 像控点布设与测量
像控点是航测基础,像控点的布设情况影响后期空三解算精度,高精度的平面和高程像控点布设是实现1∶500大比例地形图绘制的必需步骤。通常像控点数目越多,对应空三解算精度就会越高,但在进行像控点布设时通常需从经济、效率、精度等多个方面进行综合考虑。本文总结了像控点布设方案应满足的要求[6]:
(1)结合测区情况合理确定像控点数量,像控点位置清晰,图形容易判读;
(2)平面和高程控制点布设,控制点航向间隔应不大于4条航飞基线;
(3)平行相邻范围内,控制点基线跨度应不大于2条基线。
本次实验像控点坐标使用GNSS-RTK技术进行测量,坐标系为国家CGCS2000大地坐标系,高程基准为85国家基准高程。
2.3 航飞技术设计
由前期踏勘及已有数据分析可知,测区范围内存在最高地物高度约为70m,根据要求可知测图比例尺为1∶500,地面分辨率应不大于5cm,本实验地面分辨率为2cm。航高设计为98m。由《低空数字航空摄影规范》(CHZ3005-2010)可知:航向重叠率一般为60%~80%,且最小值应≥53%;旁向重叠率一般为15%~60%,且最小值应≥8%,本实验航向重叠率与旁向重叠率均控制在70%。飞行时同一航线上相邻像片的航高,最大航高与最小航高之差不应大于30m。
2.4 空三解算及三维建模
本文使用Context Capture全自动三维建模系统进行测区实景三维模型构建,该系统原理以原始影像数据为数据源,结合需求设置相应的辅助信息,自动化生成实景三维模型。使用Context Capture软件建立三维模型具体流程如下[7]:
(1)考虑Context Capture软件自身特性,为提高工作效率,需首先建立工作集群,将工作电脑连接局域网,共享主机内存放的原始数据,并修改其盘符,局域网内其他工作电脑建立与该盘的映射,并在该盘中进行新建工程及Block创建等工作;
(2)导入POS数据并进行数据初步检查,然后设置地理坐标系、焦距等参数,可利用3D View功能检查原始影像是否以航线轨迹排列;
(3)空三解算前需对测区内的像控点与影像数据进行关联,提高解算效率与解算精度,同时可利用3D View功能查看解算结果与空三报告;
(4)完成空三解算后,且质量满足建模要求,即可进行三维建模。考虑测区范围,结合计算机性能,对测区进行分割,进行三维重建。重建结果可在Acute 3D Viewer中查看(如图6所示):

图6 部分测区三维模型
2.5 地形图绘制
EPS是基于GIS平台研发的地理信息工作站,该产品融合了CAD与GIS技术,优势明显:
(1)支持二维、三维测图,数据源可支持DSM、OSGB、3DS、OBJ等多种数据格式;
(2)可实现多窗口联动绘图,正射影像与三维模型联合采图;
(3)支持采编建库一体化,实现信息化与动态符号化;
(4)三维采、编、质检与平台二维功能一致,并提供直观的三维专用功能;
(5)提供所采地物根据指定位置快速升降高程信息;
(6)支持影像之间快速切换、模型切割去除植被与高楼、自动提取矢量、网络化生产,数据统一管理。
现阶段,EPS软件被广泛应用在测绘与地理信息数据处理中,本文主要利用EPS数据处理中的3D Survey功能进行地形图绘制。使用EPS软件进行地形图绘制的主要流程(如图7所示):

图7 EPS三维绘图流程
地形图绘制完成后,结果(如图8所示)。可利用EPS软件进行数据质量检查,主要包括编码、图层等数据是否正确,逻辑、悬挂、面相交等空间关系是否合理。
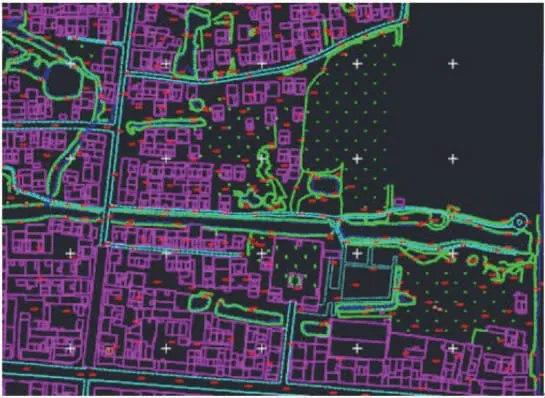
图8 部分测区地形图
3.精度分析
3.1 三维模型精细度分析
根据《三维地理信息模型数据产品规范》(CH/T 9015-2012)对测区内三维模型进行精细度评价。利用Acute 3D Viewer对本次实验测区内的三维模型精细度进行随机抽样评价,结果如下:模型整体结构无明显缺陷,建筑等纹理与实际相符,细节清晰可见,精细等级可为I级,满足大比例尺地形图生产需求。
3.2 三维模型空三精度分析
空三解算结束后,根据《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009)要求,以1∶500成图比例尺为主(如表1所示),对控制点、检查点解算结果进行精度分析,结果(如表2所示):
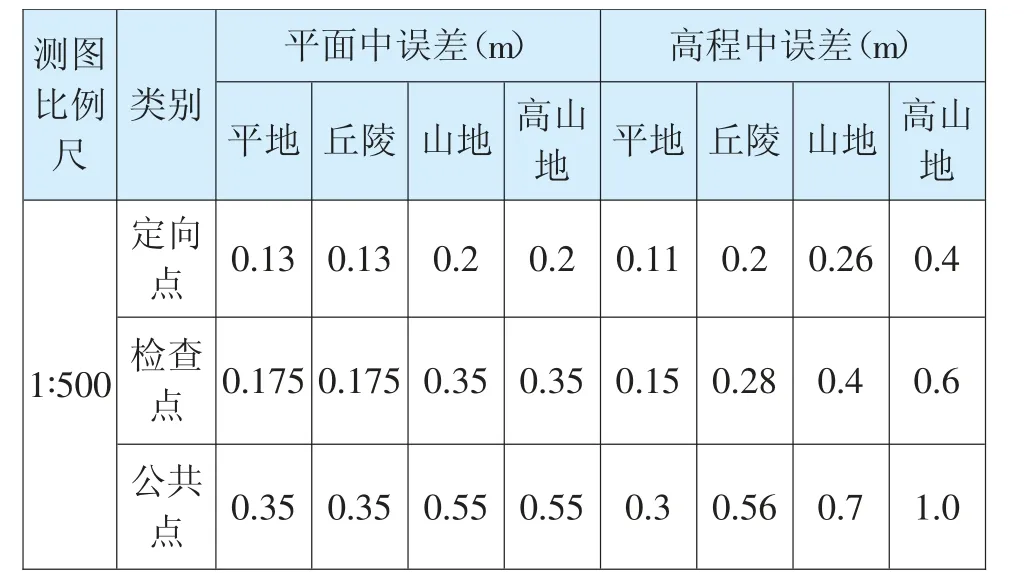
表1 成图比例尺为1∶500的空中三角测量精度要求

表2 空三解算误差统计表
结合表2和图9可知:X、Y、Z三个方向上的误差值都较为稳定,数据质量较好,重投影误差均小于1个像素,除KZ4点3D误差较大外,其他点均在1cm左右。控制点和检查点的平面中误差均小于精度要求最小值0.13m,控制点和检查点的高程中误差均小于精度要求最小值0.11m,均满足规定要求。
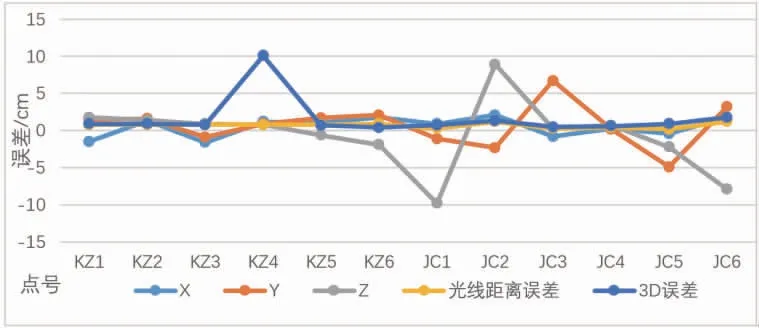
图9 空三解算误差折线图
3.3 地形图精度分析
地形图精度分析通常可采用传统数字化测图绘制的地形图与倾斜摄影测量地形图进行对比,同时可对比对应检查点,其检查点位置可选择房角点、路灯、道路标识牌等。
测区内随机选取15个检查点,利用RTK测量三维坐标,并与图9上坐标进行比较,利用中误差进行精度评价,如式(3)所示,计算结果(如表3所示):

表3 1∶500比例尺的测区图像限差

式(3)中,ms为平面中误差;mh为高程中误差;Δsi为平面残差;Δhi为高程残差。
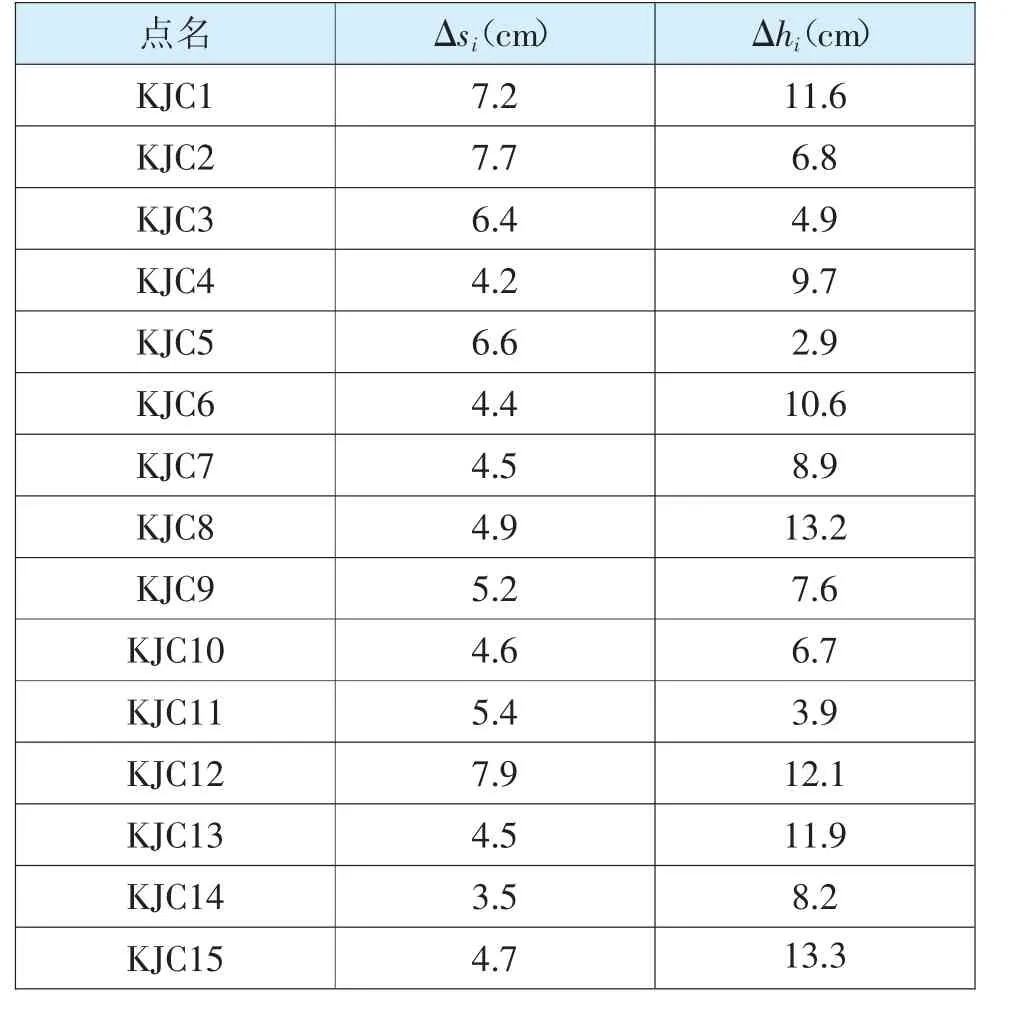
表4 地形图精度结果
根据《国家基本比例尺地形图更新规范》(GB/T 14268-2008),结合表3中1∶500比例尺的测区图像限差要求,用式(3)计算可得:平面中误差为5.6cm,高程中误差为9.4cm,由此可知:该方法精度满足平原地形的1∶500大比例尺地形图绘制要求。
4.结束语
本文针对大比例尺地形图快速、高精度生产问题,对基于倾斜摄影测量技术地形图生产方法进行了探讨和实验验证,提供了非量测相机检校方法,解决了多视角影像密集匹配问题,提高了数据精度。同时阐述了无人机倾斜摄影测量大比例地形图生产的技术流程,通过实验分析了测区内三维模型精细度,针对产品精度问题,利用图表形式分别对空三解算精度和地形图精度进行了分析,并以中误差作为评价依据,结合规范进行了精度评价,证明了此方法的可行性及可推广性。
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02 17:36:34
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
童话世界(2018年17期)2018-07-30 01:52:02
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
中国卫生(2014年9期)2014-11-12 13:02:00
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41
癌变·畸变·突变(2014年6期)2014-02-27 06:15:03
