
倾斜摄影测量技术在农村不动产测绘项目中的应用及精度分析
——以南京市江宁区为例
2021-02-15 07:53:10方青周飞
经纬天地 2021年6期
方 青 周 飞
(1.南京市规划和自然资源局江宁分局,江苏 南京 211100;2.江苏苏地仁合土地房地产资产评估测绘造价咨询有限公司,江苏 南京 210005)
0.引言
南京市江宁区房地一体权籍调查项目体量大、时间紧、任务重,依靠传统测量手段已不能满足项目的需要。因此,采用高效率、低成本的倾斜摄影测量是最为有效、可行度高的技术方法。
一般测量方法包括全站仪数字采集和传统摄影测量。传统摄影测量技术多采用单镜头垂直影像采集,由于无法对屋檐长度进行有效改正,需到实地勘丈,浪费人力物力。倾斜摄影测量相比于传统垂直摄影测量优势明显。主要优势如下:
(1)免受地物遮挡的影响,在地物上层空间几乎无死角获取影像;
(2)获取的影像纹理更为清晰;
(3)多角度重叠区域的影像更为丰富,用于交会的同名光线数量更多,有利于提高三维模型的精度。
无人机倾斜摄影测量技术可方便灵活地通过垂直、前、后、左、右五个镜头获取地物的表征三维影像特征。在飞行拍摄过程中,由航飞系统自动记录拍摄瞬间的航高、航速、飞行姿态、坐标等信息[3]。基于三维模型的重建技术,将获取的多张像片进行拼接整合,生产出可进行测量的三维模型。数字采集具有高效性,无需佩戴立体采集设备作业。以三维模型为基础,可快速生产出DLG、DOM、DSM等数字产品,质量可靠。
在一个时段内,多镜头采集的影像数据更丰富,对三维模型修饰时,可选择最清晰的一张像片进行纹理上的加工处理,增强视觉效果。有开发的平台已实现将倾斜摄影测量获得的影像数据嵌入地理信息和属性信息,方便用户查找搜索所需的信息。
1.无人机倾斜摄影测量实施方案
江宁区地势复杂,属于江南丘陵地,村落呈团状分布,隐蔽处较多。根据江宁区农房的分布特点,按85%航向重叠度、75%旁向重叠度的标准飞行获取数据,每个架次外扩8条航线(上下各4条),每条航线外扩7条基线,以此保证航摄区域无漏洞且有足够外扩的空间。
1.1 技术实施路线图
为确保技术路线的顺利实施,理顺每个作业环节的流程,明确作业的具体事项,确定无人机倾斜摄影测量技术路线图(如图1所示):

图1 无人机倾斜摄影测量技术路线图
1.2 准备航测、预设技术指标
无人机相对飞行高度控制在85m以下,地面分辨率优于1.5cm。航摄时间要求太阳高度角大于25o,阴影倍数小于2.1倍。机载GPS解算的定位信息要求PDOP小于3,倾斜角小于等于15°,航线飞行比较平直,航线弯曲度在1%以内,旋偏角小于25°,航高差不大于1m[2]。飞行结束后及时下载影像数据、飞行记录数据等文件,检查数据的完整性和质量状况,且保证POS数据数目与影像数目一一对应。
1.3 像控点测量
农村不动产权籍测绘成图对高程无要求,但无人机航飞的像控点必须保证密度、平面位置、高程的精度。因此,像控点根据江宁区下辖自然村的实际道路情况、村庄大小进行布设。像控点的坐标高程信息使用NJCORS系统采集,保证平面与高程精度。像控点坐标分两组采集,凡平面位置差值大于2cm或高程差值大于3cm的点位均核实重测。在地物密集区域内,像控点平均间距约为100m。
1.4 倾斜摄影测量
利用差分定位技术将安装在摄影平台上的GNSS接收机采集的点位坐标与区域周边的多个地面基准站的点位坐标进行联合计算,确定平台接收机相位中心的坐标[1]。再结合无人机系统的几何参数(内方位元素)、三个姿态角确定摄影中心的空间坐标。其中每张航摄像片的姿态参数可通过三维旋转矩阵的计算获得。
完成内定向、相对定向后,引入像控点进行绝对定向的计算。由于像控点分布较少,必须进行空中三角测量。空中三角测量计算程序会产生大量的连接点,此时需人工干预,检查整体点位的质量,主要是查看连接点的密度与精度,若大量点位不符合要求,则修改参数重新生成连接点,直到连接点基本满足要求后,再剔除少量超限点,并满足点位的密度。其中连接点的平面中误差应低于0.3个像素单位,平面最大误差应低于2.5个像素单位。空三流程完成后,对于无法通过软件自动匹配形成的部分连接点,可在调整完连接点之后手动加入。若连接点不处于模型关键区域,不影响项目成果的精度,可适当删除连接点。
倾斜摄影测量系统的时间同步不仅涉及各传感器的镜头间,还涉及定位定姿设备与获取影像设备间。为满足GPS钟与惯性导航系统的时间同步,起飞之前,必须对POS系统进行初始化。
1.5 三维建模
获取航飞影像后,对影像数据进行匀光处理和镜头畸变处理。经空三解算后,利用配套的软件生产三维模型。融合摄影测量学、图形学、计算机成像等技术,将不同比例、不同分辨率的影像经过DSM点云生成、构建TIN、纹理映射,生成带纹理外观的三维模型。对于外观处于阴影部分或拍摄不清晰的模型外观应人工剔除,选择纹理清晰、层次分明的表层做外观处理。模型采用分层显示技术,由于低空飞行,地面分辨率最优可达1.2cm,能够详细表达地物细部特征。三维模型截图中已包含二维线划图(如图2所示):

图2 三维模型与二维线划图
1.6 人工采集,生产DLG
依据权籍要素采集的范围和种类,在三维模型上分类采集所需的各类要素,形成初步的地籍地形图。设定合适房屋的高程面采集房屋等单一建构筑物,当层次、拐点无法判别时,内业人员做标记进行外业核实。采集房屋边长要素时,若只采集点位,以点构线,则点位偏差与相对边长误差极大,不能满足精度要求。后文将对精度进行分析。
1.7 外业补测,堪丈核实
倾斜摄影测量这一技术生成的模型精度已大为提高,测量方法也节约了大量人力。但江宁区个别区域农村房屋构造较复杂、遮挡较多,为保证测量精度,内业做标记处采用外业的方法人工核实。
2.精度分析
2.1 像控点数量对精度影响
选取的实验区域(如图3所示),此区域位于江宁区淳化街道某自然村,该自然村共布设了17个像控点,像控点间距约为100m,布设地点合理,密度均匀。实验区域按密度分别抽取9个像控点与13个像控点,抽取的像控点可组成控制网。抽取分组的实验点位名称(如表1所示):

图3 像控点布设示意图

表1 实验点位分组情形
运用VirtuoZoAAT软件,加入不同批次的像控点对此区域进行空中三角测量的解算,三维建模后,由同一名数据采集人员分三批次采样同点名的检核点(排除人工采集差异的因素对精度的影响)。通过模型采集点位与全站仪实测点位对比分析,计算平面差值及中误差。
依据高精度检测的对比方法,不妨假设全站仪实测点位为近似真值,则检测点平面坐标点位中误差计算公式为:

该实验区域选取了20个点位进行检测。不动产权籍测绘对高程无要求,检核点未选取高程进行检核。检核结果(如表2所示):

表2 检核点位中误差统计表 单位:cm
根据《地籍调查规程》(TD/T1001-2012)的要求,界址点相对于邻近控制点的点位中误差不得超过5cm。A组数据的点位中误差不满足要求,B组与C组的实验数据的点位中误差符合要求,B组至C组中误差变化趋势明显放缓,精度提高不显著[5]。由此可见,该试验区域均匀布设像控点点数在17个是较为经济合适的,遵循此密度的布设方式,像控点平均间距则控制在80m左右。
2.2 人工采集对精度的影响
三维模型构建完毕后,基于模型人工采集形成DLG。由于最终提交的图形成果以地籍地形图为基准,那么在模型精度相当的基础上,人工采集数据的误差则会影响最终成果的精度。
现对同一三维模型抽取40条界址边长,由两组数据采集人员分别进行数据采集。M组由熟练数据采集人员构成,N组由初学模型数据采集人员构成。选取的界址边长由长边或色差区分不显著的短边构成,短边的选取(如图4所示):

图4 短边示意图
两组人员的采集实验数据(如表3所示)使用高精度检测的方法计算误差。M组采集的边长数据与检测值的较差的中误差小于5cm,N组采集的边长数据与检测值的较差的中误差高达16.3cm,远超中误差的限值。
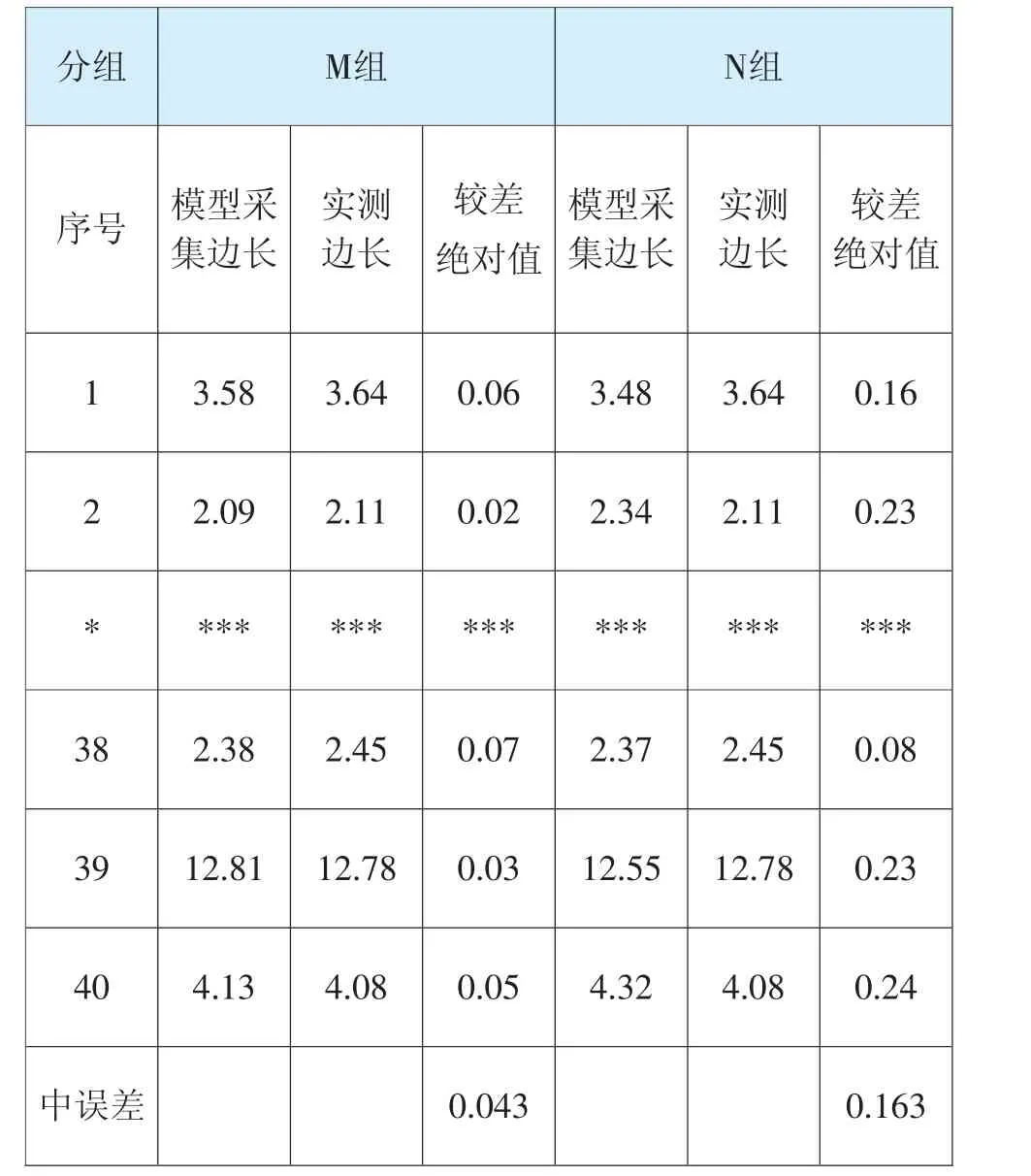
表3 检核边长较差表 单位:cm
对照两组人员的点位采集方式,N组直接采点操作较多,拐角不清晰处采点较为随意。因此,为提高精度,在采集长边中应遵循两端采点形成方向线的原则,避免边长方向偏差较大。房角点位应避免直接采点,多运用邻边相交获取要素点位的方法。对于大多数正规房屋,运用软件自带的直角转弯功能形成房角点。人工采集对成果的影响是显著的,熟练度不同的技术人员对于同一三维模型采集形成的地籍地形图的精度差异巨大[4]。
3.结论
倾斜摄影测量内业基于三维模型,采集地籍要素时无需佩戴立体眼镜,可减轻内业人员的视觉负担,使采集整理一体化,效率较高。结果初步证明了这一测量技术在地籍地形测量中的实用性。对于像控点的布设密度,经实验证明布设间距以80m至100m为宜,可保证空中三角测量质量检查的顺利通过;三维模型的数据采集需掌握基本的方法,避免直接点位的采点,降低模型采集的粗差率。利用无人机倾斜摄影不仅能够方便快速地获取三维模型要素,形成地籍地形图,还为后续登记发证工作提供现势性较强的模型佐证,给予农户更清晰直观的视觉画面。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:40:24
河南城建学院学报(2020年3期)2020-08-14 01:08:38
制造技术与机床(2018年12期)2018-12-23 02:41:18
电子制作(2018年11期)2018-08-04 03:25:38
汽车文摘(2016年6期)2016-12-07 00:23:38
测绘科学与工程(2016年5期)2016-04-17 06:51:15
测绘科学与工程(2016年4期)2016-04-17 06:51:08
电测与仪表(2015年3期)2015-04-09 11:37:22
交通建设与管理(2015年15期)2015-03-20 15:19:26
电子设计工程(2015年3期)2015-02-27 12:03:45
