
基于滑动平均滤波的永磁电机无位置传感器控制策略*
2021-02-15 12:21张开继张国强李宇欣王高林徐殿国
电气工程学报 2021年4期
张开继 张国强 李宇欣 王高林 徐殿国
基于滑动平均滤波的永磁电机无位置传感器控制策略*
张开继 张国强 李宇欣 王高林 徐殿国
(哈尔滨工业大学电气工程及自动化学院 哈尔滨 150006)
永磁同步电机无传感器控制能够显著提高驱动系统的鲁棒性和可靠性,并降低成本。针对基于高频信号注入无传感器控制中滤波环节导致系统性能降低的问题,提出一种基于滑动平均滤波的无传感器控制策略。在分析高频信号处理环节对电流环及转子位置观测性能影响基础上,进而提出一种基于滑动平均滤波的无传感器控制方法。该方法利用滑动平均滤波代替电流环中反馈通路上以及位置误差获取环节的传统滤波器,提高了无传感器系统控制性能。试验结果表明,该方法可减少反馈电流谐波含量,有效提升系统带宽;同时可有效提取高频电流,改善位置观测动态性能。
永磁同步电机;无传感器控制;滑动平均滤波器;高频注入
1 引言
如今,永磁同步电机(Permanent magnet synchronic motor, PMSM)在高性能要求变速系统中的应用越来越广泛[1-4]。永磁同步电机的高性能矢量控制需要精确的转子位置信息,通常要在转子轴端安装位置传感器[5-6]。然而,这些传感器会使系统的成本增加、体积增大,极易受外界环境干扰。为克服这些缺点,永磁同步电机的无传感器控制(Sensorless control)技术成为热门研究课题。通常,PMSM无位置传感器的实现方法可以根据电机运行频率范围分为两类。当电机运行频率在中/高速时,转子位置信息的获取主要利用模型法[7-11]。而当电机零/低速运行时,主要应用高频信号注入法(High frequency signal injection,HFSI)[12]来获取转子位置及转速。
高频信号的注入会在电机基频电流中引入高频响应电流。因此,为保证系统跟随给定的动态性能,应使电机中的反馈电流平滑真实且不包含高频成分。故不可避免地要使用到低通滤波器(Low pass filter, LPF)处理。此外,高频信号注入虽然能够实现电机零/低速无传感器控制的运行,但信号的注入增加了信号处理的复杂程度,在对高频电流响应的处理过程中也需要借助LPF、高通滤波器(High pass filter, HPF)或带通滤波器(Band pass filter, BPF)和转子位置观测器等实现转速和转子位置的估计。滤波器截止频率的选择使得系统未确定参数数量增加,降低了系统对于参数的鲁棒性,影响转子位置的观测精度,不利于系统的设计。滤波器的引入限制了系统的带宽,影响系统动态性能。因此,众多学者对此展开了探讨钻研。文献[13]中,二阶广义积分器被提出与PI调节器相结合可以提高电流环的动态性能,但积分器的引入无疑加大了系统的复杂性和计算量[14]。除此之外,针对注入信号与调制信号的时序关系,文献[15]提出了滑动平均滤波器(Moving average filter,MAF),利用高频信号的周期性和半波对称性来消除特定谐波,结构简单,仅需设计采样深度一个参数,便于实现,用于取代传统的LPF、BPF和HPF,实现高动态品质的无传感器控制。
文章以永磁同步电机低速无传感器控制方法为基础,首先分析了传统滤波器对永磁同步电机无位置传感器控制系统的影响,进而提出基于MAF的无传感器控制方法。其次,对传统滤波器和滑动平均滤波器在离散域进行分析,验证所提算法的理论可行性。最后分别利用仿真平台和永磁同步电机对拖试验平台验证了算法的有效性。
2 无传感器系统传统信号处理方式
2.1 高频方波信号注入转子位置观测
PMSM在轴系下的高频数学模型为[16]
式中,dh、qh分别为轴高频电压分量;dh、qh分别为轴系下的高频电流分量;d、q分别为轴电感;为微分算子。
注入的信号数学表达式为


图1 坐标轴系关系图
从测量轴系提取转子位置误差为[16]

由式(3)可知,可以根据电流的幅值计算转子位置误差,因此,获得高频电流响应的幅值显得尤为重要。通过高通滤波器处理测量轴系下的总电流可以分离出高频电流响应的幅值。对分离到的波形进行绝对值处理,可得到幅值不变、频率倍增的非负信号,可以采用低通滤波器分离出包含转子位置误差信号的直流信号。图2为位置误差信号提取流程图,同时为了提高观测器输入对电机参数及输入电压幅值的鲁棒性,对提取到的电流幅值进行标幺化处理。

图2 测量轴系下位置误差信号提取方法
2.2 传统滤波器对系统影响分析
永磁电机在零/低速条件下使用额外的信号注入来获取转子位置及转速信息,因此系统中需要引入低通滤波器来滤除电流中的高频成分,滤波输出的基频电流用于完成电流环的反馈。然而滤波器的使用会加大系统的时间延迟常数d,破坏电流环的一阶惯性结构,使得电流环带宽降低,限制了电流环的动态性能,等效后的电流环框图如图3所示。

图3 等效后的电流环框图
当设置电流环带宽c在800 Hz处,LPF的截止频率在400 Hz、1 000 Hz时,可以得到系统闭环传递函数的伯德图,根据图4中的曲线变化和带宽标记可知,随着LPF截止频率的降低,电流环的带宽由800 Hz减小为525 Hz和401 Hz。因此,取代电流反馈中的LPF对提高电流环带宽,改善系统动态性能具有重要意义。
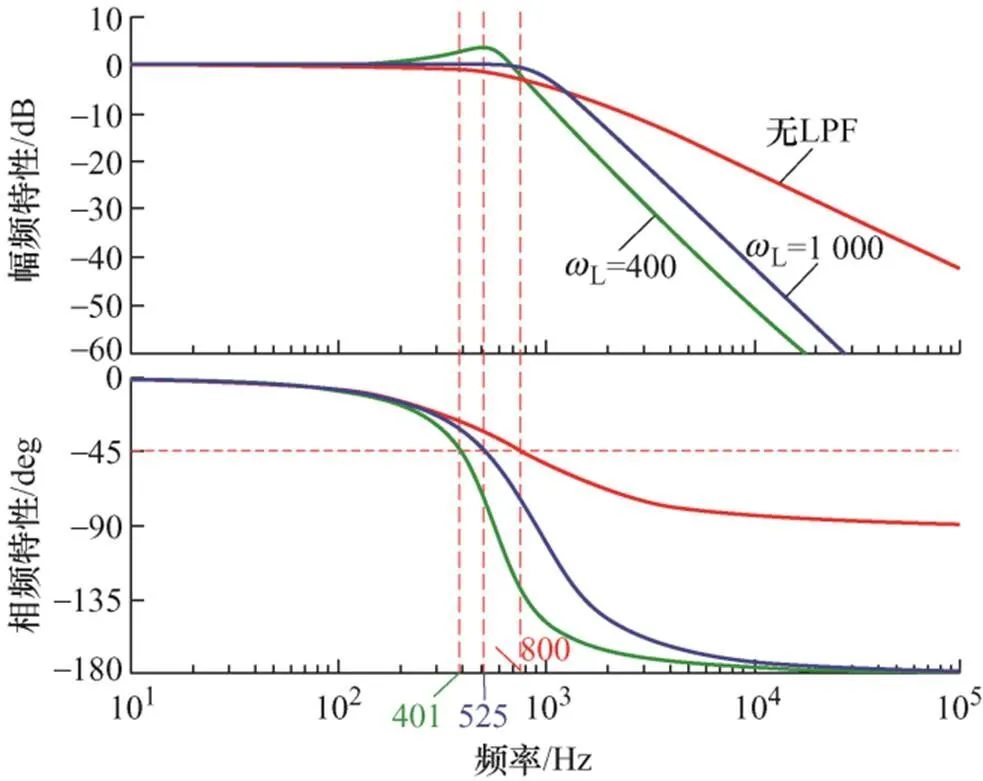
图4 系统有无LPF时电流闭环伯德图
同时,为了获取准确的高频电流信号计算转子位置误差,不可避免地需要使用LPF和BPF处理采样后的电流。首先,在设计HPF或BPF时,低阶次的滤波器会降低系统对高频信号的信噪比,引起观测转子位置的波动,而高阶次的滤波器则会影响系统的动态性能。其次,在设计LPF时既要保证足够高的带宽,以使系统有较快的动态响应速度,还要限制系统的带宽,保证有效滤除信号中的高频成分,二者是互相矛盾的。这些传统滤波器的使用会因增大了系统信号处理环节中的延迟时间从而影响到系统带宽,进而降低系统输出跟随给定的动态性能。因此,设计合理的算法取代传统滤波器,使之能够有较快的动态响应,同时能够有效滤除信号,更好地实现永磁电机无传感器控制。
3 基于滑动平均滤波的信号处理方法
3.1 滑动平均滤波算法
3.1.1 滑动平均滤波器数学模型
针对第2节提出的问题,本文应用滑动平均滤波器(MAF)代替传统滤波器,以提高电流环带宽同时提高转子位置观测器动态响应。滑动平均滤波器频域表达式为[15]

式中,h为MAF滤波长度,其幅频特性为

根据式(5)可知,当信号频率为1/h的整数倍时,经过MAF的输出幅值均为零,说明MAF可以有效滤除信号中的高频成分,获得基频成分。用Pade公式去近似算法中的纯滞后环节时,离散建模后MAF为

在离散控制系统中,MAF的离散表现形式为

式中,为采样深度,=h/s;s为采样周期;()为电流采样值;为采样时刻。离散系统差分方程为

3.1.2 滑动平均滤波算法频域分析
图5为截止频率在900~1 100 Hz间BPF与滑动平均算法(1-z-4)/2的伯德图。根据图5可知,对于频率为1 kHz的输入信号,BPF和滑动平均的输出均没有幅值衰减和相位滞后,因此能够有效地提取出测量轴系下的高频响应电流。
图6为截止频率为300 Hz的LPF与滑动平均算法的伯德图。根据图6可知,LPF和MAF都能够有效抑制频率为2 kHz的三角波信号,可以提取出电流的基频分量,但相比之下MAF的带宽更高。受到电流环带宽限制,LPF的截止频率不能设置过低,所以采用MAF提升滤波效果,对高频谐波有很强的抑制能力。采用滑动平均算法代替BPF和LPF,可大大降低编程难度,提高CPU的运算效率,提升系统的动态响应速度。
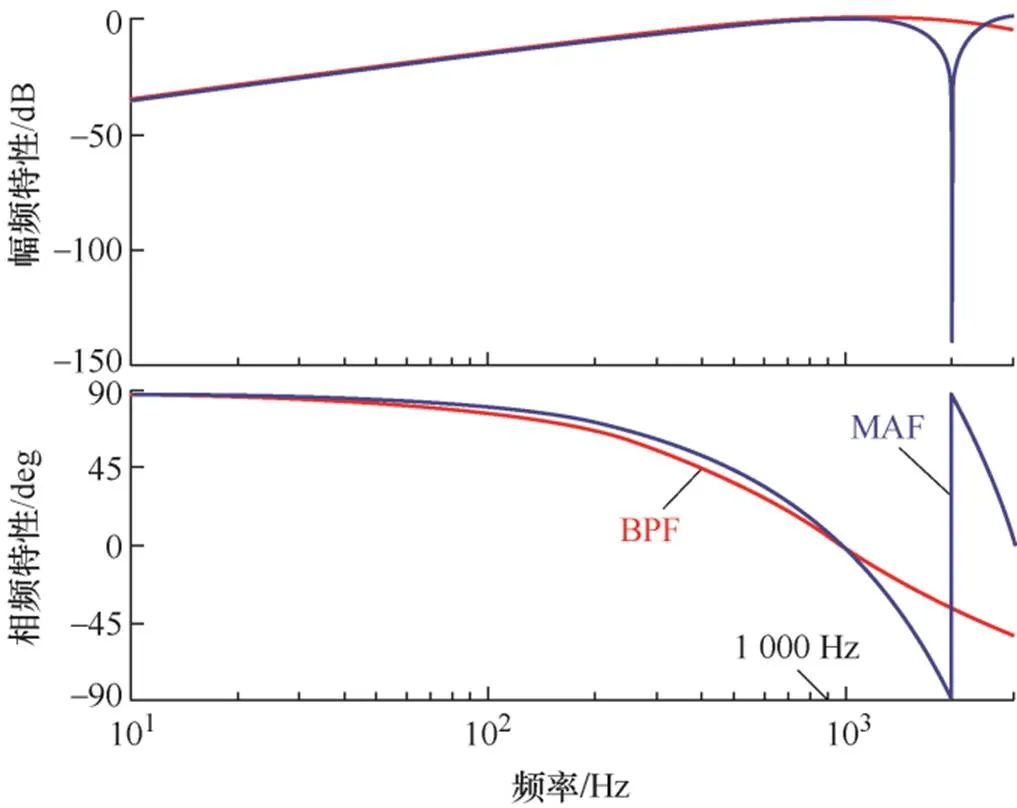
图5 BPF与滑动平均算法伯德图

图6 LPF与滑动平均算法伯德图
3.2 高频信号处理环节改进
3.2.1 电流环反馈环节改进
以载波频率是注入频率的8倍为例,利用MAF替代反馈电流环滤波器。如图7所示为改进控制系统总体框图。
首先,由于、轴系中均能够感应出高频响应电流,而在轴中感应出的高频响应电流在转子位置误差趋近于零时幅值很小,因此,可在轴系中仅对轴电流进行滤波,减少了滤波器的数量。其次,利用滑动平均方法取代传统滤波器的使用,当注入频率为载波频率的1/8时,根据轴高频电流响应的正负规律,可将滑动平均的电流采样间隔设为4个载波周期。为保证电流环的带宽,对基频电流设置的LPF的截止频率不能过小,当电流环带宽设置为800 Hz时,截止频率为900 Hz的LPF对高频响应电流的衰减仅为-3.47 dB。而对于滑动平均来说,由于载波频率和注入频率的8倍关系,同时根据电流响应时序图(图8)可知,当注入方波极性不变时,测量轴系下的高频电流响应呈单调递增或递减的变化趋势,因此每隔4个载波周期,高频电流响应处于极点,此时利用相邻两个极点作和就可以获得基频电流,可以很好滤除高频响应电流。

图7 改进控制系统总体框图
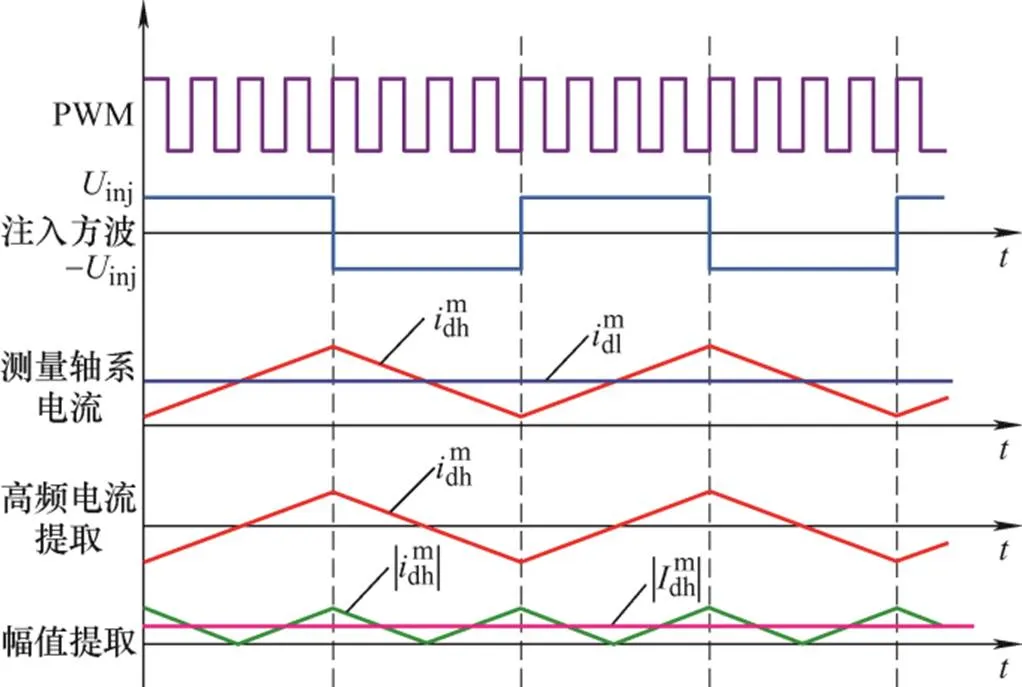
图8 电流响应时序图
3.2.2 转子位置观测环节改进
为消除滤波器的使用给位置观测带来的不利影响,采用滑动平均算法优化信号处理过程,利用载波频率与注入频率之间的关系对测量轴系的电流进行处理,从而取代滤波器。改进后的转子位置误差信号提取流程如图9所示。
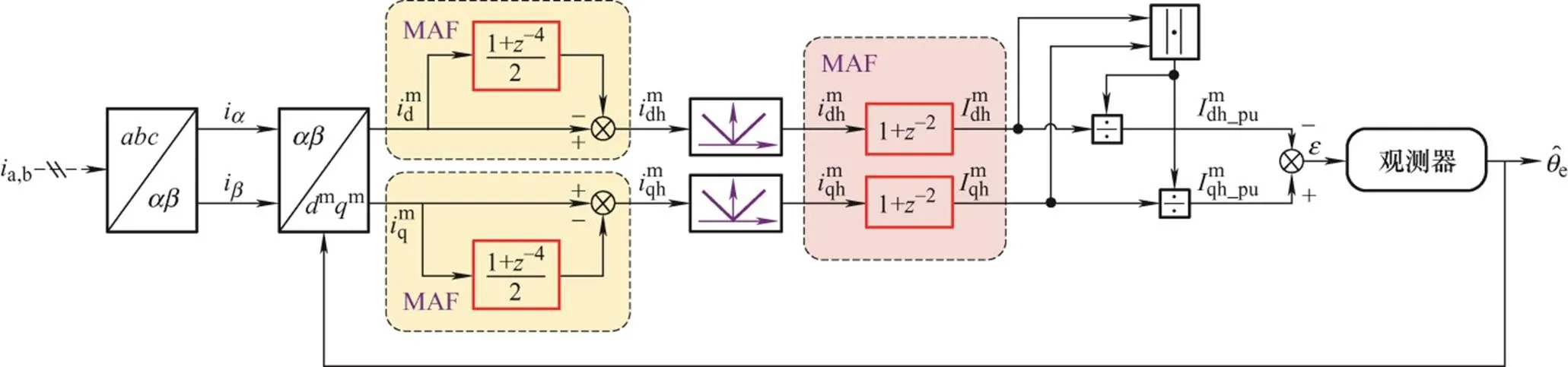
图9 改进后的转子位置误差信号提取方法
位置误差信号提取过程中电流响应时序图如图8所示。当注入方波极性不变时,测量轴系下的高频电流响应呈单调的变化趋势,因此每隔4个载波周期,高频电流响应处于极点,此时利用相邻两个极点作和与测量轴系总电流相减即可获得高频电流,这一环节代替了传统方法中BPF的使用。将提取到的高频电流取绝对值,就可得到频率倍增且非负的电流信号,此信号的相邻峰值点仅隔2个载波周期,再次通过相邻峰值点作和的形式即可获得带有转子位置信息的高频电流幅值,这一环节代替了传统方法中LPF的使用。
4 试验结果分析
4.1 永磁电机试验平台
在图10所示的永磁同步电机对拖加载试验平台上进行测试。
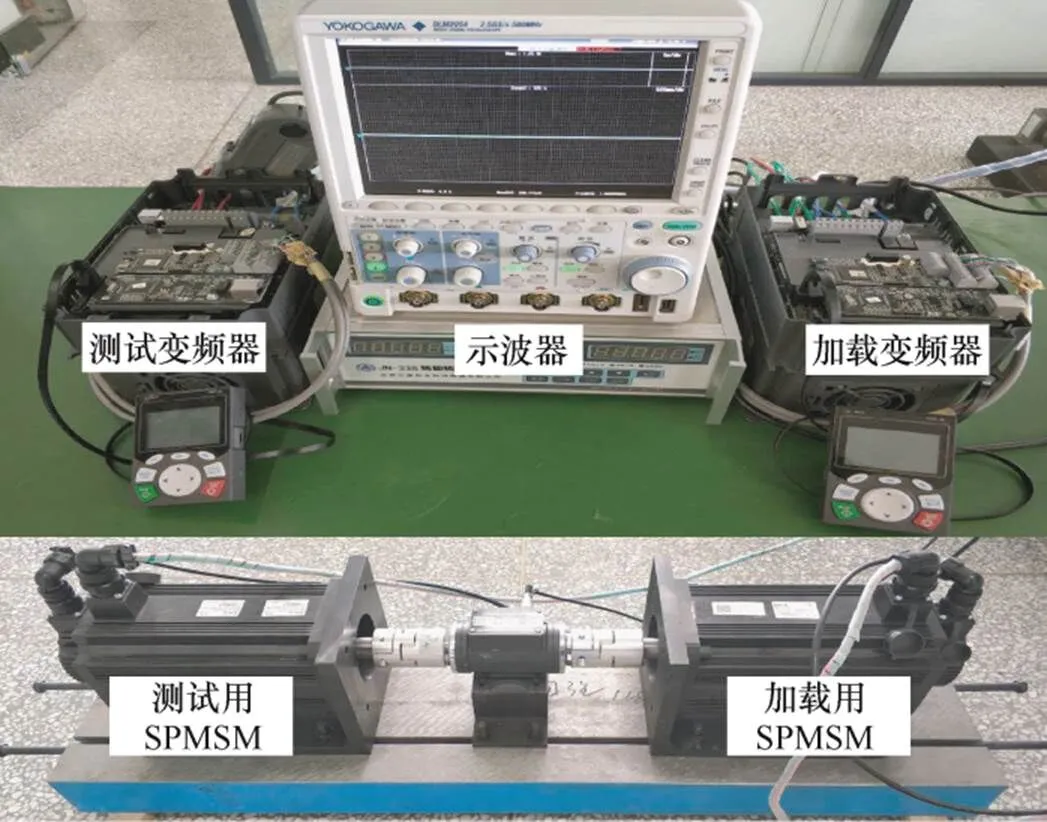
图10 7.5 kW永磁同步电机对拖加载试验平台
变频器使用TI公司的TMS320F28075数字信号处理芯片,负责控制系统信号采样、双闭环计算、SVPWM调制计算等工作。两台7.5 kW表贴式电机同轴连在一起,其中测试用SPMSM产生电磁转矩,加载用SPMSM用来加载,其参数如表1所示。电机起动初始位置辨识采用基于复合信号注入初始位置检测方法[17],为改善高频信号注入法应用效果,采用注入轴偏置电流的方式激发表贴式永磁电机产生饱和凸极效应,提高无位置传感器控制性能。

表1 表贴式永磁同步电机参数表
4.2 电机稳态运行性能提升试验结果

图11 分别采用LPF和MAF处理d轴反馈电流试验结果
4.3 转子位置观测试验结果
当电机给定频率为3 Hz时,对电机进行由空载至额定负载的加载试验。图12为使用截止频率为900~1 100 Hz的BPF获取到的高频电流响应曲线及其放大对比。图13为使用采样间隔点为4的MAF获取到的高频电流响应曲线及其放大对比。从右侧的放大波形中可以看出m和m轴电流响应是频率为1 kHz的高频信号。对比图12和图13可知,在电机平稳运行于给定频率或受到外界干扰时,MAF都可以有效取代传统的BPF,提取到频率为1 kHz的高频电流响应。

图12 使用BPF获取到的高频电流试验结果
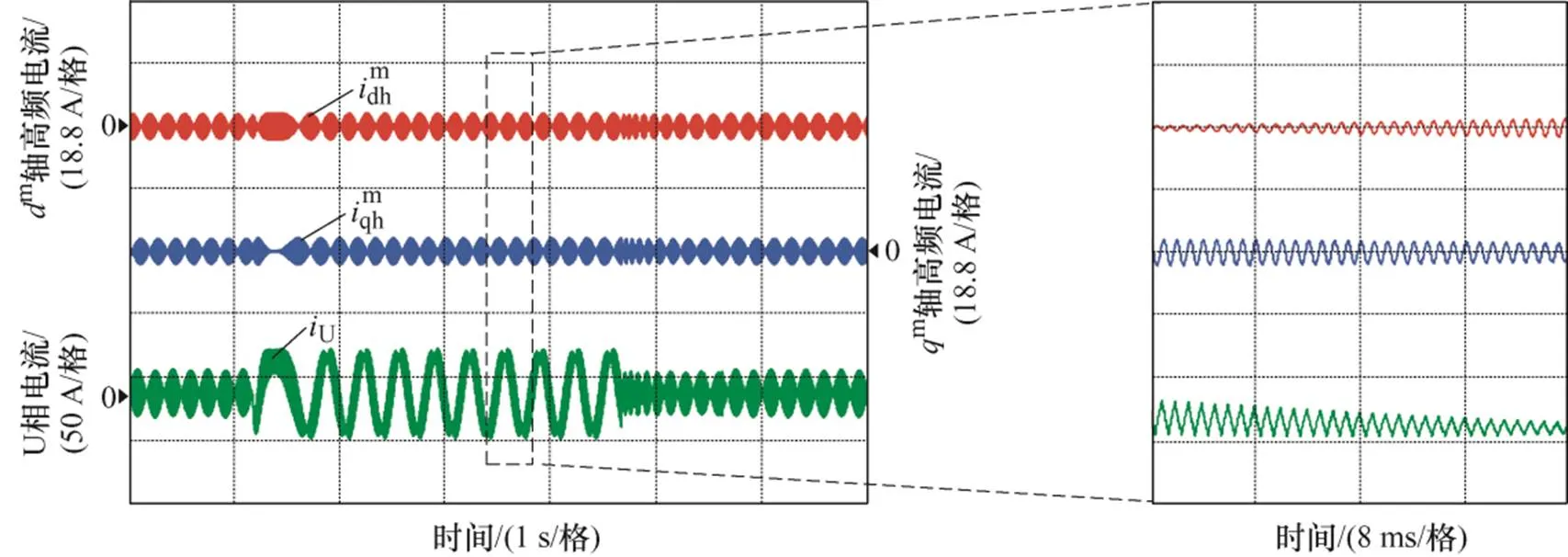
图13 使用MAF获取到的高频电流试验结果
图14和图15为当电机运行频率为3 Hz时,对电机进行由空载至额定负载的加载试验结果。其中,图14为使用BPF和LPF进行位置观测的试验结果,图15为将BPF和LPF均替换为MAF时的试验结果。从误差输入曲线对比中可以看出,当电机稳态运行时,使用MAF提取到的误差输入波动更小,从而使利用转子位置观测器观测到的转速及转子位置更加准确。对比图14和图15的加载点可知,当电机突加负载时,使用MAF提取观测位置时获得的转子位置误差的跌落明显小于传统信号处理方式下获得的转子位置误差输入,分别跌落为3°和10°,约减小70%,有效提升了观测系统的动态性能。
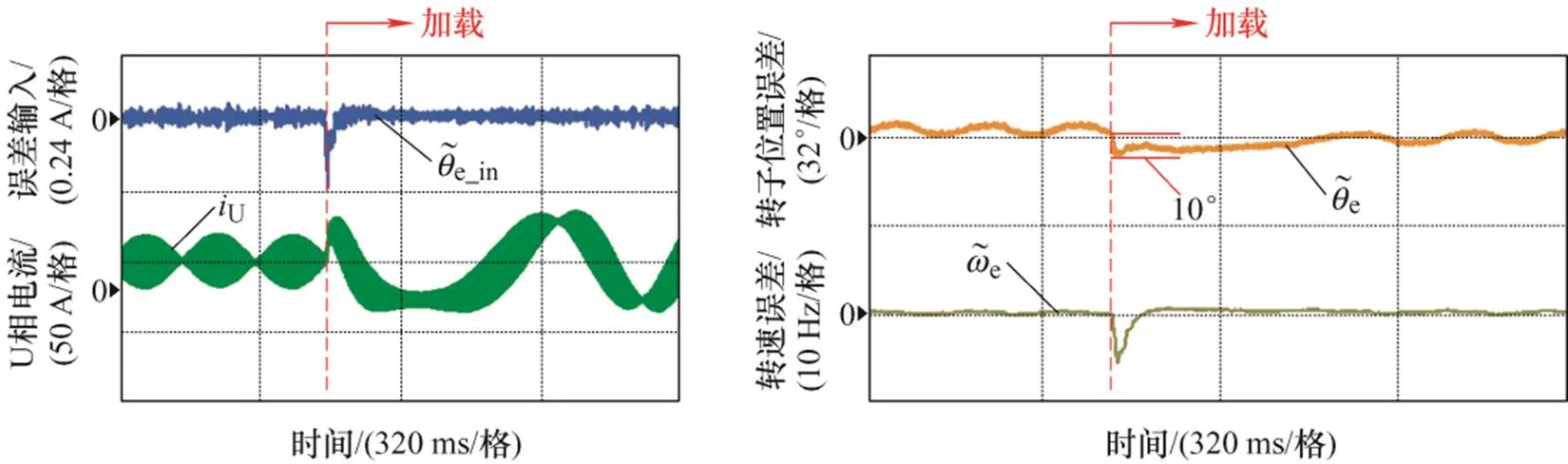
图14 使用BPF和LPF进行位置观测试验结果

图15 使用MAF进行位置观测试验结果
5 结论
永磁电机无传感器控制系统因其高可靠性和低成本而被广泛使用,但在零/低速运行条件下,需要额外的高频信号注入转子位置,而高频信号的注入会使系统引入额外的滤波器,限制了系统的动态性能,降低了转子位置观测的精度。本文对比了传统滤波器和滑动平均滤波器对系统的影响,得到如下结论。
(1) 传统滤波器增大了系统信号处理环节中的延迟时间从而影响到系统带宽,进而降低无传感器控制系统输出跟随给定的动态性能。
(2) 采用滑动平均滤波器替代系统中低通滤波器和二阶带通滤波器,在保证电机无位置传感器平稳运行的前提下,提升了转子位置观测的精度和电流环的动态性能。
[1] 周双飞,黄海波,简炜. Luenberger观测器在永磁同步电机无传感器控制中的应用研究[J]. 电机与控制应用,2017,44(10):59-62.
ZHOU Shuangfei,HUANG Haibo,JIAN Wei. Research on application of Luenberger observer in sensorless control of permanent magnet synchronous motor[J]. Electric Machines & Control Application,2017,44(10):59-62.
[2] 刘栋良,任劲松,林伟杰,等. 基于电感辨识的电流解耦算法在内置式永磁同步电机弱磁控制中的应用[J]. 电工技术学报,2017,32(16):98-105.
LIU Dongliang,REN Jinsong,LIN Weijie,et al. Current decoupling algorithm based on inductance identification in the application of interior permanent magnet synchronous motor flux-weakening control[J]. Transactions of China Electrotechnical Society,2017,32(16):98-105.
[3] 徐静,段芳,江天炎. 模糊MRAS方法在永磁同步电机无速度传感器控制系统中的应用[J]. 电机与控制应用,2015,42(12):55-58.
XU Jing,DUAN Fang,JIANG Tianyan. A fuzzy logic based MRAS scheme used in sensorless control of permanent magnet synchronous motor drives[J]. Electric Machines & Control Application,2015,42(12):55-58.
[4] 李政,胡广大,崔家瑞,等. 永磁同步电机调速系统的积分型滑模变结构控制[J]. 中国电机工程学报,2014,34(3):431-437.
LI Zheng,HU Guangda,CUI Jiarui,et al. Sliding-mode variable structure control with integral action for permanent magnet synchronous motor[J]. Proceedings of the CSEE,2014,34(3):431-437.
[5] 孙佃升. 基于改进型ESO的表贴式永磁同步电机无位置传感器控制[J]. 电气传动,2021,51(3):3-8.
SUN Diansheng. Sensorless control of surface mounted permanent magnet synchronous motor based on improved extended state observer[J]. Electric Drive,2021,51(3):3-8.
[6] 张国强,王高林,徐殿国. 基于无滤波器方波信号注入的永磁同步电机初始位置检测方法[J]. 电工技术学报,2017,32(13):162-168.
ZHANG Guoqiang,WANG Gaolin,XU Dianguo. Filterless square-wave injection based initial position detection for permanent magnet synchronous machines[J]. Transactions of China Electrotechnical Society,2017,32(13):162-168.
[7] 刘计龙,肖飞,沈洋,等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报,2017,32(16):76-88.
LIU Jilong,XIAO Fei,SHEN Yang,et al. Position-sensorless control technology of permanent- magnet synchronous motor-A review[J]. Transactions of China Electrotechnical Society,2017,32(16):76-88.
[8] 张越雷,黄科元,蒋智,等. 基于估算电流模型的永磁同步电机无速度传感器控制[J]. 微电机,2021,54(2):55-66.
ZHANG Yuelei,HUANG Keyuan,JIANG Zhi,et al. Speed sensorless control of PMSM based on estimated current model[J]. Micromotor,2021,54(2):55-66.
[9] 张鑫,张传金. 改进的滑模观测器实现PMSM无传感器控制[J]. 电气传动,2021,51(3):36-40.
ZHANG Xin,ZHANG Chuanjin. Sensorless control of PMSM realized by an improved sliding mode observer[J]. Electric Drive,2021,51(3):36-40.
[10] 马骁,陈宇,苏婧媛,等. 基于模型参考自适应的无刷双馈电机独立发电系统转速辨识方法[J]. 中国电机工程学报,2017,37(17):5171-5180,5237.
MA Xiao,CHEN Yu,SU Jingyuan,et al. Speed estimation method for brushless doubly-fed machine stand-alone generation system based on model reference adaptivity[J]. Proceedings of the CSEE,2017,37(17):5171-5180,5237.
[11] 时维国,刘坤亮. 基于MRAS的永磁同步电机无位置传感器控制策略研究[J]. 电机与控制应用,2019,46(7):39-44.
SHI Weiguo,LIU Kunliang. Research on permanent magnet synchronous motor position sensorless control strategy based on MRAS[J]. Electric Machines & Control Application,2019,46(7):39-44.
[12] JIN X,NI R,CHEN W,et al. High-frequency voltage-injection methods and observer design for initial position detection of permanent magnet synchronous machines[J]. IEEE Transactions on Power Electronics,33(9):7971-7979.
[13] LIU B,ZHOU B,NI T. Principle and stability analysis of an improved self-sensing control strategy for surface-mounted PMSM drives using second-order generalized integrators[J]. IEEE Transactions on Energy Conversion,2018,33(1):126-136.
[14] SUUL J A,LUNA A,RODRIGUEZ P,et al. Voltage-sensor-less synchronization to unbalanced grids by frequency-adaptive virtual flux estimation[J]. IEEE Trans. Ind. Electron.,2012,59(7):2910-2923.
[15] LI H,ZHANG X,XU C,et al. Sensorless control of IPMSM using moving-average-filter based PLL on HF pulsating signal injection method[J]. IEEE Transactions on Energy Conversion,2020,35(1):43-52.
[16] 杨旭. 表贴式永磁同步电机无传感器低速运行控制策略研究[D]. 哈尔滨:哈尔滨工业大学,2020.
YANG Xu. Research on low speed sensorless control strategies for SPMSM[D]. Harbin:Harbin Institute of Technology,2020.
[17] 张国强. 基于全阶滑模观测器的IPMSM无位置传感器控制策略研究[D]. 哈尔滨:哈尔滨工业大学,2013.
ZHANG Guoqiang. Full-order sliding mode observer based position sensorless IPMSM control strategy[D]. Harbin:Harbin Institute of Technology,2013.
Sensorless Control Strategy of Permanent Magnet Motor Based on Moving Average Filtering
ZHANG Kaiji ZHANG Guoqiang LI Yuxin WANG Gaolin XU Dianguo
(School of Electrical Engineering and Automaion, Harbin Institute of Technology, Harbin 150006)
Sensorless control of PMSM can significantly improve the robustness and reliability of the drive system and reduce the cost. Aiming at the problem of system performance degradation caused by filtering in sensorless control based on high frequency signal injection, an improved sensorless control strategy based on moving average filtering is proposed. First of all, based on the analysis of the high frequency signal processing part of current loop and the rotor position based on observed performance impact, a kind of sensorless control method based on moving average filter is put forward. Instead of the position error in the feedback path in the current loop and link of the traditional filter, the moving average filter is used in this method, the control performance without sensor system is improved. Experimental results show that the harmonic content of feedback current is reduced and the bandwidth of the system is effectively improved in this method. At the same time, the high frequency current can be extracted effectively and the dynamic performance of position observation can be improved.
Permanent magnet synchronic motor;sensorless control;moving average filter;high frequency injection
10.11985/2021.04.012
TM561
* 国家自然科学基金资助项目(51961130385)。
20210802收到初稿,20211025收到修改稿
张开继,男,1998年生,硕士研究生。主要研究方向为永磁电机无传感器控制。E-mail:zhangkaijiee@163.com
张国强(通信作者),男,1987年生,博士,副教授。主要研究方向为交流电机控制理论与应用技术。E-mail:ZhGQ@hit.edu.cn
李宇欣,女,1997年生,硕士研究生。主要研究方向为高频方波电压注入永磁电机无传感器抗扰动控制策略。E-mail:liyuxinzm@163.com
王高林,男,1978年生,教授,博士研究生导师。主要研究方向为交流电机无传感器控制、直驱式曳引系统控制和电机效率优化控制。E-mail:WGL818@hit.edu.cn
徐殿国,男,1960年生,教授,博士研究生导师。主要研究方向为交流电机无传感器控制、交流伺服系统、照明电源技术、电力电子化电力系统等。E-mail:xudiang@hit.edu.cn
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
制造技术与机床(2018年11期)2018-11-23
意林(绘英语)(2018年1期)2018-04-28
光学精密工程(2016年3期)2016-11-07
城市轨道交通研究(2015年11期)2015-02-27
大电机技术(2015年5期)2015-02-27
雷达学报(2014年4期)2014-04-23
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
