
计算机虚拟仿真技术在学科竞赛中的应用与实践
2021-02-11 06:15尚腾蛟刘春东
无线互联科技 2021年24期
马 宏,尚腾蛟,田 阳,刘春东,3*
(1.河北建筑工程学院,河北 张家口 075000;2.张家口市智能机械技术创新中心,河北 张家口 075000;3.河北省机械基础教学示范中心,河北 张家口 075000)
0 引言
计算机虚拟仿真技术是随着计算机发展起来的全新技术,具有逼真性、实时性和交互性等特征[1],在学科竞赛中起到的作用也越来越重要,特别是在工科专业竞赛中。[2]。本文以全国工程实践与创新能力大赛为例,应用计算机虚拟仿真技术设计物流搬运机器人,快速获取最终设计方案。
1 智能物流搬运机器人赛项的设计要求
要求机器人的外形尺寸不超过300×300×400(单位mm)的空间范围。物料包络在直径为50 mm,高度为70 mm的圆柱形空间范围内。物料放置在原料区物料架上,物料架设置上下两层,每层放置3个,料架及物料放置如图1所示。机器人搬运上述物料。
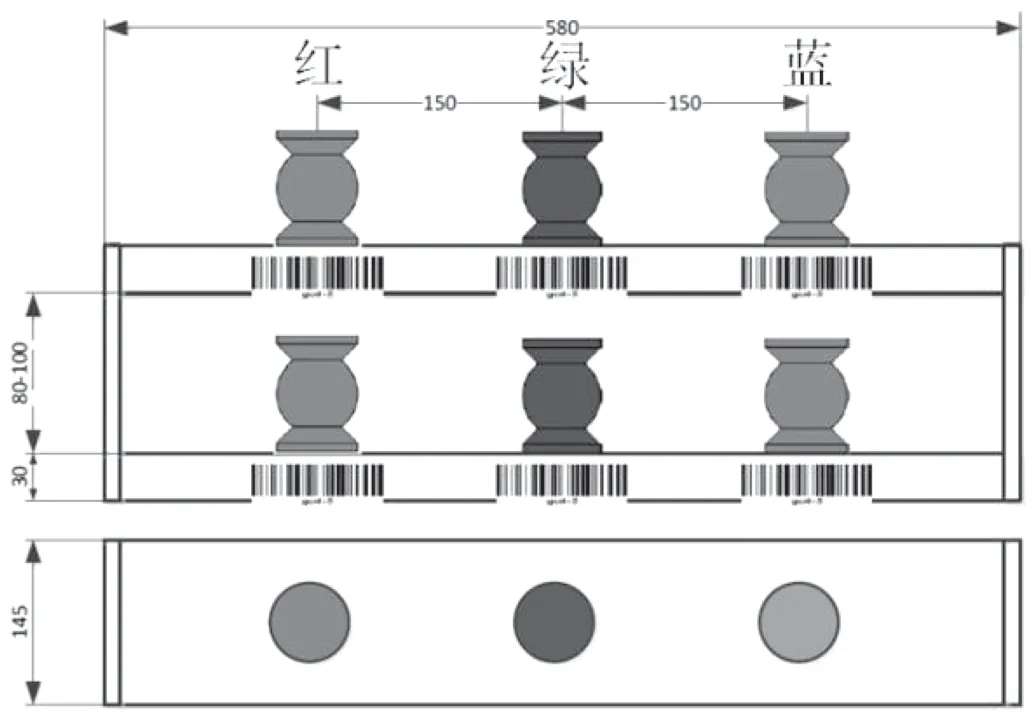
图1 料架及物料放置
机器人运行至抓取工位后依次抓取上层的物料,之后机器人运行至粗加工区将物料依次放置在对应的色环内,再将粗加工区的物料依次抓取,运行至半成品区,将料仓内物料按照任务要求再次放置色环内。作业地图如图2所示。
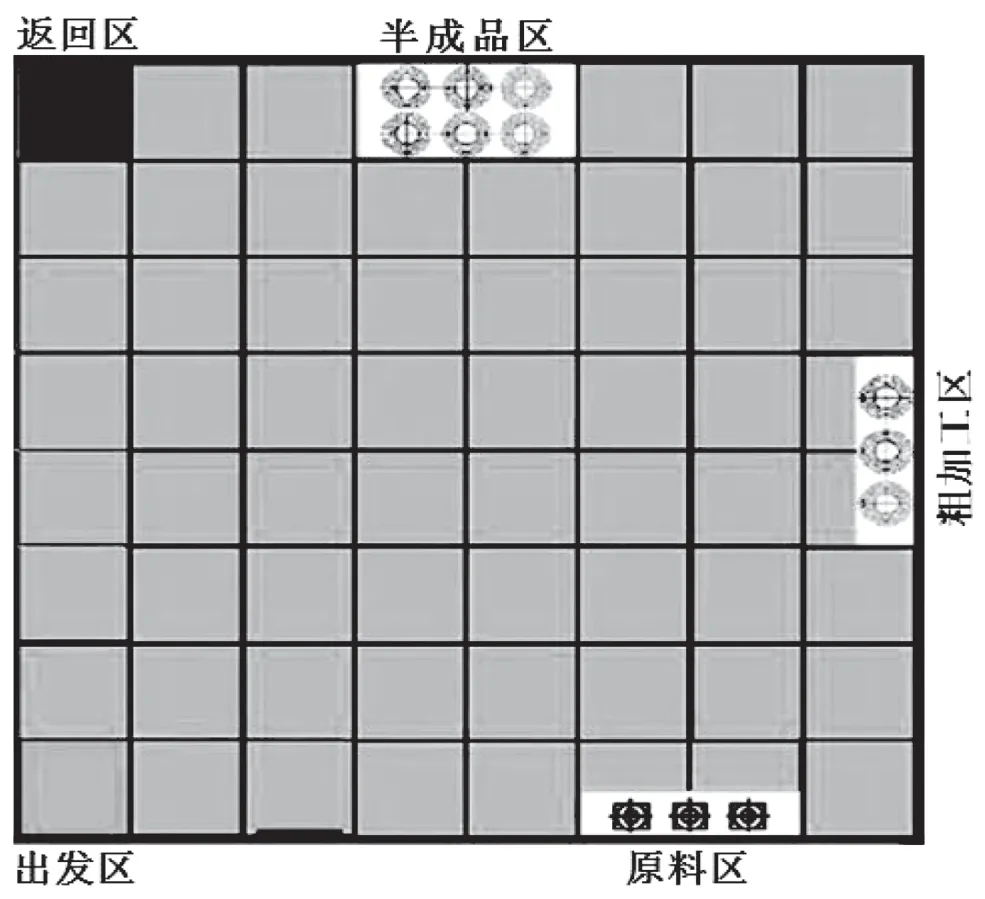
图2 机器人搬运作业地图
以上即为上层物料的抓放要求。完成上层物料的抓放之后,机器人再次重复上述动作,将下层物料完成搬运。
2 应用计算机仿真技术进行设计
2.1 机器人底盘仿真设计
选用SolidWorks作为本次虚拟仿真的软件,设计机器人主体结构板尺寸为298×298 mm;选用直流电机与麦克纳姆轮式结构作为驱动单元,同时将灰度传感器、电路托板等结构通过计算机仿真技术进行结构仿真并完成虚拟装配,如图3所示。
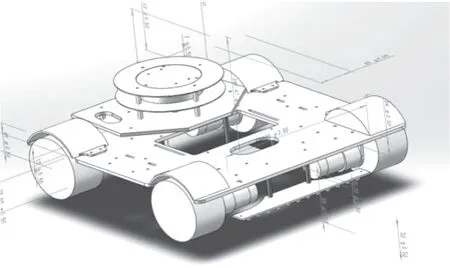
图3 机器人底盘虚拟仿真设计
2.2 机械臂虚拟仿真设计
根据物料形状,机械爪上下两支开合结构。选用可单独水平运动的连杆式机械臂,结合抓取和放置工位的运行摆角,设计大臂和小臂的结构;进行虚拟仿真设计,并完成装配,如图4所示。
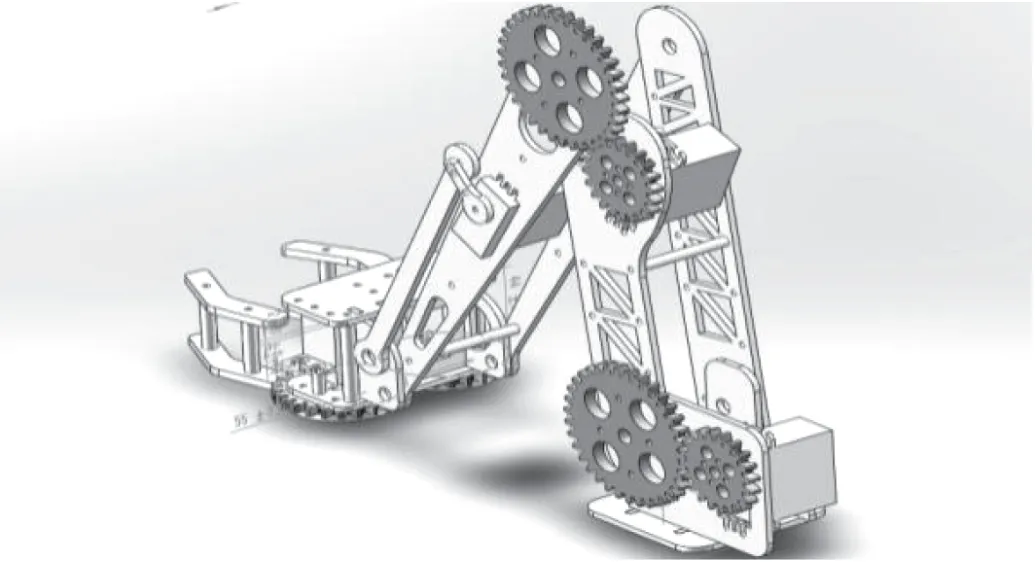
图4 机械臂虚拟仿真设计
2.3 机器人整机虚拟仿真设计
将上述设计完成底盘、机械爪和机械臂进行仿真装配,完成整机装配,如图5所示。

图5 机械人整机虚拟仿真设计
完成后进行机构和理性检验以及总体尺寸验证,符合设计要求的空间范围。同时,通过计算机运动仿真验证机械臂的工作范围,以满足各抓取和放置的作业范围要求。
3 结语
本文以工程实践与创新能力大赛为例,将计算机虚拟仿真技术应用到智能物流搬运机器人的结构设计中,有效地提高了作品的设计效率。偏重于动手能力的工科竞赛往往需要加工和制造实物参赛,在作品设计过程中应用计算机虚拟仿真技术可以提高设计效率,并降低设计成本。
猜你喜欢
中等数学(2022年3期)2022-06-05
河北金融年鉴(2020年0期)2021-01-21
作文通讯·高中版(2017年11期)2017-12-20
公民与法治(2016年22期)2016-05-17
汽车实用技术(2015年8期)2015-12-26
河北城市研究(2015年3期)2015-08-23
警察技术(2015年3期)2015-02-27
电力工程技术(2012年5期)2012-03-25
军事历史(1982年3期)1982-08-21
