基于变结构控制算法的ROV低速控位系统设计
2021-02-07 08:56中国船舶集团有限公司第七一研究所卢海洋
电子世界 2021年2期
中国船舶集团有限公司第七一〇研究所 查 智 卢海洋
随着现代文明的高速发展,人类对海洋资源的需求越来越大。ROV(缆控水下机器人)是集智能控制技术、导航技术、目标探测和识别技术、数据融合等技术为一体的高科技平台,能在复杂的海洋环境中进行水下作业,对人类开发海洋资源有着重大意义。本文根据ROV的特点,主要介绍以下几点:基于PC104的ROV控制系统硬件设计、基于嵌入式实时操作系统Vxworks的ROV软件体系架构设计、基于变结构控制算法和多执行结构结合的ROV低速控位系统设计。与传统的ROV设计方法相比,采用基于PC104的硬件架构简化了硬件设计工作,保证了系统硬件的可靠性和扩展性;采用基于Vxworks的软件体系架构可以保证系统的实时性、可靠性、维护性和继承性;采用多推进器布局和变结构控制算法结合的方式能实现ROV在复杂的海水环境中低速控位,为ROV水下精确作业提供保证。本文对ROV的工程设计和应用有较好的参考价值。
ROV(缆控水下机器人)是一种集成了探测识别技术、通信和导航技术、智能控制等技术的水下无人作业平台。ROV采用特殊线缆(内含电力线和光纤)与水面控制端连接,实现了水面对水下的能源馈送和水面控制端与ROV的实时通信;操控人员通过水面控制端能实时掌握ROV工作状态及水下目标信息,可根据水下实际情况决定是否对目标进行处理;因此,ROV在海事研究、水下作业打捞等海洋事务中具有其它设备不可替代的作用。由于ROV涉及的技术较多,本文主要讨论的内容如下:ROV控制系统硬件架构设计、基于Vxworks的ROV软件架构设计、基于多执行机构和变结构控制算法结合的ROV低速控位系统设计。
1 ROV控制系统硬件设计
ROV控制系统采用PC104嵌入式计算机,它具有如下特点:(1)与普通PC机100%兼容;(2)采用层叠方式,因此体积超小;(3)单+5V供电,功耗较低;(4)宽工作温度范围,可靠性极高。因此,PC104被广泛应用于航空、航天、航海等领域。另外,PC104的硬件资源非常丰富,主要如下:(1)CPU频率高达1G以上,能够满足各种控制场合;(2)自带多路串口以及多路可编程数字I/O口,方便实现分布式控制;(3)自带多路100M/1000M自适应网口、USB口等;(4)通过扩展其它板卡,可增加CAN总线、串口、模数转换等多种硬件资源,系统扩展性好。
控制系统是整个ROV系统的大脑,负责对各分布式设备的数据进行融合,实时发送控制命令给各设备,因此控制系统必须具备高可靠性。另外,由于设备的更新换代和系统升级的需要,要求硬件系统具备较好的扩展性,方便外挂各种分布式设备,而PC104总线具备良好的扩展性,可以满足系统硬件扩展的需求。

图1 ROV控制系统硬件架构
ROV控制系统硬件设计基于PC104架构,采用主板、采集板、扩展板、继电器板和用户底板的结构,主板型号:LX3160,采集板:ADT680-AT,扩展板:A3-CSD,继电器板:IRQ4,用户底板用于扩展一些特殊应用电路。ROV控制系统硬件架构如图1所示。
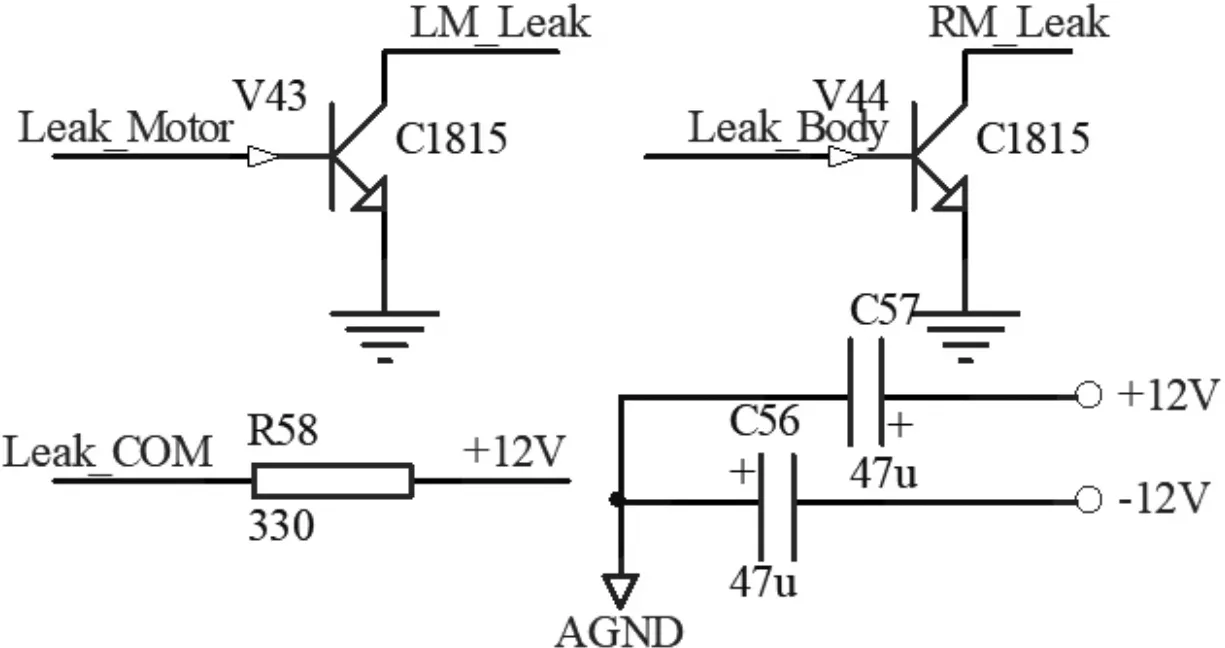
图2 漏水报警电路图
ROV集成了多种分布式设备(传感器和执行机构),控制系统与分布式设备之间采用数字通信,通信模式为主从方式,即ROV控制系统为主控制单元,各分布式设备控制器为从控制单元,主控制器根据从控制器上传的信息作出判断,从控制器只需执行主控制器命令。另外,ROV中有部分信号需要通过PC104的数字端口和模拟端口进行数据采集,用户底板用来实现将原始信号处理为PC104所需的标准信号,包括漏水报警、模拟采集电路、开关电路等。其中漏水报警电路原理图如图2所示。
另外,在早期的ROV系统中,控制系统与各分布式设备多采用模拟信号或串口进行信息交互,这种方式硬件电路复杂,设备接线杂乱,当ROV中分布式设备众多时,不利于ROV的功能扩展和实现分布式组网。
采用CAN总线组网通信,可以有效克服上述问题,CAN通信有几个优点:(1)CAN总线方便外挂多个分布式设备,且CAN总线自带的软件通信仲裁机制使CAN总线方便实现多点对多点通信;(2)硬件设计简化,电气接线简单;(3)CAN总线应用成熟,可靠性高。
2 基于Vxworks的软件架构设计
ROV控制系统软件设计基于嵌入式实时操作系统Vxworks,开发环境为WindRiver workbench 3.0。为了将复杂的系统功能分解,任务设计时根据软件功能划分了多个独立的子任务,每个子任务实现一种功能,任务之间功能相对独立,任务间可以通过信号量或消息队列实现信息交互。根据ROV的使命任务,将系统功能按软件层次进行分解,最终划分为数字量采集与控制、推进电机数据接收与处理、舵机数据接收与处理、深度计数据接收与处理、北斗定位数据接收与处理、组合导航数据接收与处理、航行控制、上下位机通信、应急保护等任务。根据ROV控制的实际情况,将上述任务根据优先等级进行排序,最终确定应急保护任务为最高优先级。系统开机后,软件自动运行,在主任务中启动其它任务。ROV控制系统软件架构如图3所示。
任务创建代码:


图3 ROV控制系统软件架构图
Vxworks中的任务调度机制为基于优先级的时间片轮转调度模式。当一个任务在规定的时间片内没有执行完毕,如果另外一个优先级更高的任务进入就绪状态,则原来正在进行的任务进入就绪状态,新任务进入运行状态,直到下一个时间片没有更高优先级的任务进入就绪状态,优先级低的任务才可被执行。这种基于优先级的时间片轮转调度模式使软件具备较好的实时性。
3 ROV低速控位系统设计
3.1 执行机构布局
ROV在复杂的海洋环境中作业时,有时需要在水下指定位置进行低速控位,要使ROV具备这种功能,必须通过执行机构实现。为此,在ROV后方左、右两侧各布置一套水平推进器,在ROV中部左右两侧各布置一套垂向推进器,在ROV尾部左右两侧布置一套水平舵机。其中,水平推进器可实现ROV在水中的前进、后退和转向;垂向推进器用于控制ROV的上浮和下潜;水平舵机和垂向推进器一起用于控制ROV在较高速度航行时的上浮和下潜,水平舵机在低速控位时对ROV的作用可忽略不计。
3.2 变结构控制算法
当ROV以较高速度航行时,其在水下的主要运动是沿纵轴的轴向运动和垂直于纵轴的垂向运动,轴向运动由水平推进器完成,垂向运动由水平舵机和垂向推进器合作完成。在低速控位时,由于ROV航行速度低,水平舵机的垂向作用效果差,ROV在垂向推进器和水平推进器的共同作用下,主要表现出垂向运动和横向运动,由于洋流的持续作用,ROV会出现大攻角和大侧滑角的运动态势。综上所述,ROV在低速控位时所受的流体动力和高速航行时所受的流体动力存在较大差别。因此,我们定义ROV坐标系中任意一点处横向流的速度函数为:

为了得到低速控位时ROV的流体粘性位置力,将ROV沿轴向分成多个小段(运用切片理论)。先分别得到每一小段的流体粘性位置力,然后把计算得到的各段流体粘性位置力叠加起来,即可得到整个ROV在水下的流体粘性位置力,采用数学公式表示如下:

式中,Cdy、Cdz分别为沿ROV坐标系y轴和z轴运动时的阻力系数。
航行模式和低速控位模式可以统一为一个通用的动力学模型,即:

由于ROV自带的线缆对其运动扰动较大,加上复杂的海洋环境影响,ROV运动控制难度大,是一种复杂的被控对象,在控制特性上具有高度的非线性和耦合性。因此,给ROV的运动控制带了困难,尤其体现在海况较差、海流复杂时的低速控位工况下,其控制难度更大,常规的线性控制方法很难使其达到较好的控制效果。为了使ROV获得较好的运行控制效果,采用变结构控制策略代替传统的PID控制,使ROV能在不同的航行情况下自动进行控制模式切换,控制结构图如图4所示。
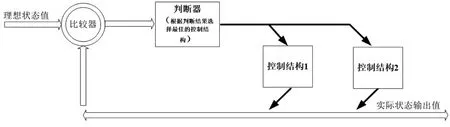
图4 ROV运动控制结构图
总结:采用基于PC104的硬件结构,简化了ROV的硬件设计。在软件设计上,采用基于Vxworks的软件架构,使软件具有良好的扩展性和可维护性,缩短了软件开发周期。采用多推进器布局和变结构控制算法结合的方式能实现ROV在复杂的海水环境中某固定点处低速控位,为ROV水下精确作业提供保障。总之,本文中的ROV能在复杂的水下环境中进行各种复杂的探测和处理任务,是一种功能齐全的水下作业平台,在海洋探测、情报搜集、水下目标处理等水下作业领域中具有不可替代的作用。
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
自动化学报(2019年6期)2019-07-23
当代陕西(2018年12期)2018-08-04
电子制作(2018年1期)2018-04-04
制造技术与机床(2017年6期)2018-01-19
制造业自动化(2017年2期)2017-03-20
学习月刊(2015年10期)2015-07-09
电源技术(2015年9期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01