
基于整数阶PI无源控制的Boost变换器研究
2021-02-01 08:15:32吴朝俊杨宁宁
电源技术 2021年1期
吴朝俊,闫 开,刘 璋,杨宁宁
(1.西安工程大学电子信息学院,陕西 西安 710048;2.西安理工大学电气工程学院,陕西 西安 710048)
Boost型DC-DC变换器由于具有快速实现升压变换的功能,因此被广泛应用于新能源并网和电力电子领域[1]。Boost变换器通常采用电压外环和电流内环的双闭环整数阶PI控制策略,双闭环整数阶PI控制由于设计简单,被应用于反馈控制系统中[2-3]。
但针对负载扰动、电子元器件参数变化等问题,双闭环整数阶PI控制的动态、静态控制性能不佳。为了快速提升Boost型DC-DC变换器的动态和静态控制性能,研究学者采用了大量的非线性控制策略,以期提高该变换器的控制性能。常用的非线性控制策略包括滑模控制、协同控制和无源控制等。文献[4-5]讲述了在滑模控制的基础上,引入了PI控制,其控制策略的优点是使系统具有更好的鲁棒性且极大地抑制了电感电流的超调,其缺点为系统存在较明显的输出电压稳态误差。文献[6]提出了协同无源控制,其控制策略在一定程度上减少了系统电感电流的超调,其缺点是控制策略复杂。为了提高变换器的控制性能,将无源控制应用于各类工程问题中,无源控制的理论依据是能量耗散原理。该理论是将被控系统能量互换于控制器,从而灵活地调节被控系统的阻尼,以期降低系统的瞬态超调量[7]。
为此,对DC-DC变换器的控制而言,为了实现其在负载扰动和电感参数改变条件下,系统能快速地稳定到期望平衡点,本文采用Boost变换器作为控制对象,将无源控制和整数阶PI控制的优点相结合,在负载扰动和系统阻尼参数改变的条件下,对整数阶PI无源控制进行了研究,并将其控制性能和无源控制性能进行了对比。最后,通过仿真和电路实验验证了该方法的硬件可行性。
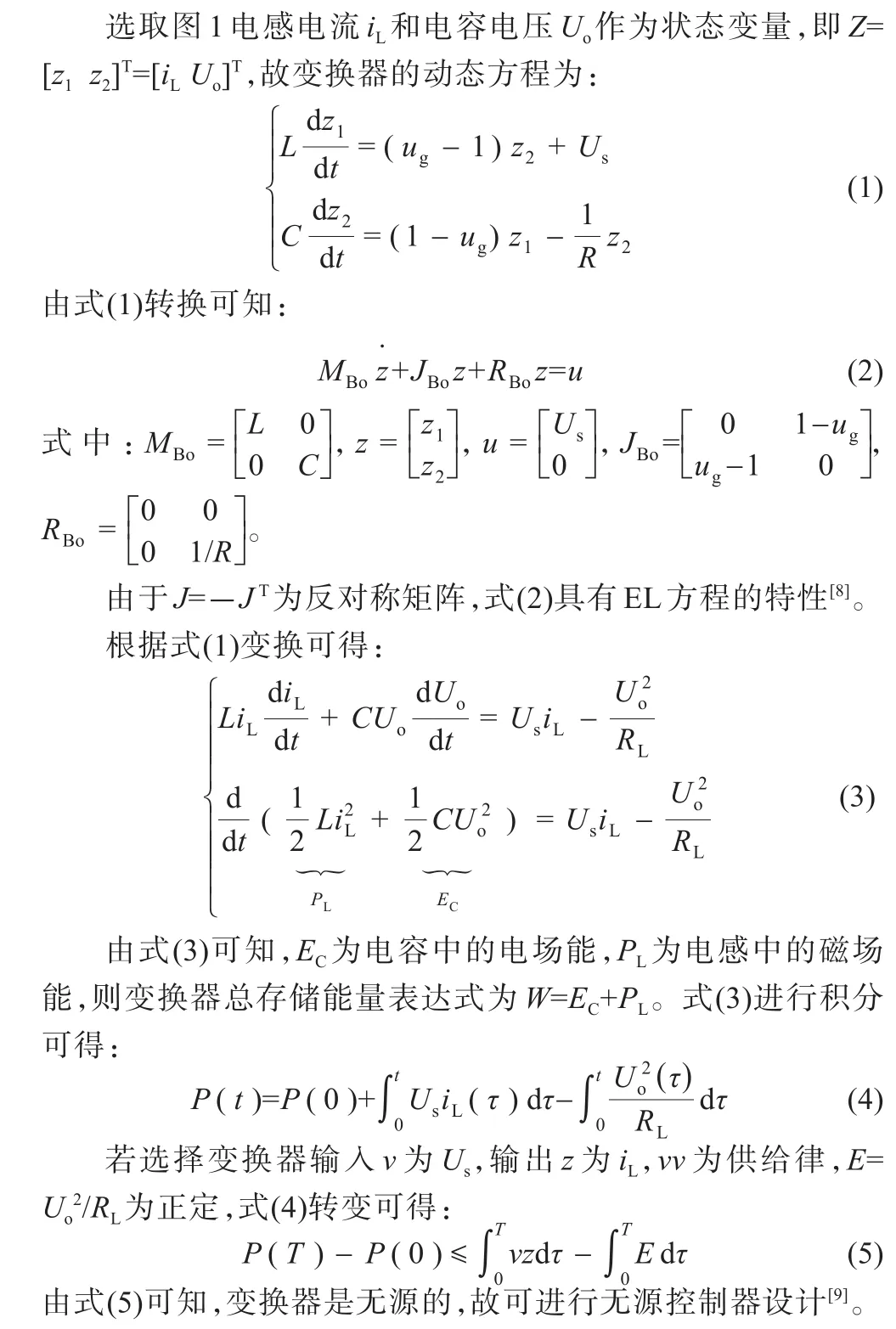
1 Boost变换器的无源性分析
Boost变换器的主电路如图1所示,由全控型器件V、电容器C及二极管D组成。当驱动信号ug=1(高电平)时,V导通,电感L存储磁场能,D关断,电容C向负载R放电;当驱动信号ug=0(低电平)时,V关断,D导通,负载电阻R和电容C由电源和电感L共同供电。

图1 Boost型直流/直流变换器
2 整数阶PI无源控制器设计

2.1 整数阶PI无源控制律


2.2 无源PI控制器分析

3 不同控制策略下Boost变换器的仿真分析
Boost变换器主电路的参数如表1所示。
通过对无源控制和整数阶PI无源控制进行深入的分析可知,假设无源控制的阻尼为αa1,其控制性能和比例系数KP对系统的调节作用是一致的,但KP无法从根本上消除整个系统的静态误差,且KP超过一定的范围后,系统会产生超调或振荡的问题。而整数阶PI控制中积分系数KI能有效调整系统的超调量,提高其动态稳定性,因此,为了实现iL追踪到iL*,引入整数阶PI控制中的积分系数KI作为附加控制因子,采用了整数阶PI无源控制策略。文献[10-11]选用Cohen-Coon法整定控制系统PI控制器参数,代入已知系统传递函数,得出系统阻尼条件下整数阶PI无源控制器的KP、KI值。无源控制和整数阶PI无源控制策略下系统阻尼改变和PI参数动态比较如图2所示。由图2可知,相比无源控制,整数阶PI无源控制的电感电流能够快速地追踪到期望电感电流1.6 A且具有较强的鲁棒性。

表1 Boost变换器主电路参数

图2 系统阻尼改变时无源控制和整数阶PI无源控制的电感电流对比图
4 整数阶PI无源控制Boost变换器实验研究
4.1 整数阶PI无源控制的实验过程
无源控制策略和整数阶PI无源控制策略先通过MATLAB/Simulink仿真测试,再采用快速控制原型仿真技术的电路实验对其进行验证。本实验由主机、NI设备、RCP、I/O口、Boost硬件电路、示波器、电子负载、可编程直流电源、辅助电源等组成(图3)。实验操作步骤如下:首先将Boost硬件电路的接口与NI设备中I/O接口相连,随之在RCP软件中应用Simulink编写的控制算法,上电后,最后通过示波器采集Boost电路上的电流值。
4.2 实验结果分析

图3 Boost变换器的实验平台

图4 系统阻尼改变时无源控制和整数阶PI无源控制的电感电流对比图
当系统阻尼改变时,无源控制和整数阶PI无源控制的电感电流比较如图4所示。相比无源控制,整数阶PI无源控制均能快速上升至期望平衡点且电感电流均为1.6 A。因此,整数阶PI无源控制策略能使电感电流快速上升至期望电感电流并且具备较强的鲁棒性。
5 结论
为了快速减小Boost变换器的电流超调问题,本文采用了整数阶PI无源控制策略。首先,在Boost变换器EL数学模型的基础上设计了整数阶PI无源控制器,以提高系统的收敛速度。其次,引入积分系数作为附加控制因子,随后根据Cohen-Coon法来获取系统最优控制参数,从而极大地降低了Boost变换器电流的超调量。仿真结果表明,相比无源控制,整数阶PI无源控制策略能够快速地达到期望平衡点,且有效地提高了系统的动态稳定性。最后,通过电路实验验证了整数阶PI无源控制器的硬件可行性。
猜你喜欢
电子制作(2019年12期)2019-07-16 08:45:14
通信电源技术(2018年5期)2018-08-23 01:16:12
中等数学(2018年12期)2018-02-16 07:48:40
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
初中生世界·七年级(2016年6期)2016-05-28 21:23:31
互联网天地(2016年2期)2016-05-04 04:03:23
电测与仪表(2015年16期)2015-04-12 00:44:38
电测与仪表(2015年13期)2015-04-09 11:57:34
电测与仪表(2014年13期)2014-04-04 12:04:16
河南科技(2014年14期)2014-02-27 14:12:08
