应用于海洋物性监测仪的小型浮标水动力分析
2021-02-01 03:01:52梁冠辉孙宝楠薛宇欢陶常飞官晟周兴华
海洋科学进展 2021年1期
梁冠辉孙宝楠薛宇欢陶常飞官 晟周兴华
(1.自然资源部 第一海洋研究所,山东 青岛266061;2.青岛海洋科学与技术试点国家实验室 区域海洋动力学与数值模拟功能实验室,山东 青岛266237)
为验证国产气温、气压、相对湿度、风场、雨量、太阳辐射、水温和海流等气象水文传感器的性能指标[1-3],拟采用小型海洋浮标为平台搭载所有传感器在2000 m以深海域开展1 a以上的示范试验。试验中浮标的运输和布放要求浮标小型化和轻便化,长期海洋试验又要求浮标具有足够的外形尺寸和质量来抵抗风、浪、流等环境载荷的影响。合理地设计浮标的外形尺寸和质量等属性既可以提高浮标数据采集精准度和浮标安全性,防止浮标出现倾覆、走锚以及断链等事故[4-5],也可以降低试验成本。考虑浮标的运输、布放要求和布放海域的水文气象条件,设计了直径3 m的小型海洋浮标。为保证浮标设计方案能满足试验要求,本文将研究其水动力特性,计算环境载荷对浮标的影响[6-7]。
目前,海洋结构物水动力研究方法主要包括:流固耦合分析法、三维势流理论分析法和多体动力学分析法,其中三维势流理论分析法以其模拟准确度高、计算速度快和软件模块成熟的优势被国内外研究者广泛应用于舰船、海洋平台和海洋浮标等水动力模拟工作中[8-10]。Chiemela等使用三维势流理论,模拟计算了悬链线锚腿系泊浮标在3个不同环境条件海域内的水动力特性,并确定了浮标的运动幅值响应算子[11];Hamidreza等运用三维势流理论和莫里森公式按照形状和尺寸对半潜平台各个组成部分进行了综合水动力模拟,应用JONSWAP波谱和API风谱作为环境条件对半潜式平台在风浪联合作用下的频域响应和时域响应进行了分析,确定了浮标尺寸和系缆长度对半潜式平台动力响应的影响[12];张炳夫等运用三维势流理论在频域内计算了规则波中系泊浮体的运动幅值响应算子,通过频时转换法在时域内求得系泊浮体在不规则波中的一阶波浪力和二阶波浪力,并将理论计算结果与模型试验结果进行了对比,验证了所采用的理论计算方法准确可靠[13];缪泉明等运用三维势流理论计算了极限海况下具备三锚系直径10 m的海洋浮标在2种水深条件下的附加质量、阻尼系数以及运动响应,并估算了锚链的受力,为浮标和锚系的设计提供了参考[14]。本研究在设计直径3 m的小型浮标过程中,基于海洋物性监测仪深远海试验海域的环境条件,运用三维势流理论和波浪辐射和绕射理论对设计的浮标开展水动力频域计算,通过仿真结果对设计方案进行优化。由于势流理论对于流体的无黏处理,本文通过仿真过程对计算结果进行了阻尼修正,提高计算结果的准确性[15]。
1 计算原理及方法
1.1 势流理论假设与边界
浮标频域仿真结果主要受海域环境载荷和浮标质量、外形等属性的影响,但受海水表面黏性摩擦力影响较小,可以忽略。三维势流理论的基本理论将流体假设为无黏、无旋和不可压缩的,适合本试验中浮标的频域仿真计算。在三维势流理论中,一般采用莫里森公式计算细长杆件,而本研究中的浮标外形尺寸不属于细长杆件,且浮标的垂荡运动响应是重要计算结果之一,因此本文采用波浪辐射和绕射理论对浮标运动响应进行计算。
势流速度场是标量函数(即速度势)的梯度,流场的边界由物面边界、流体自由面、海底边界面和无穷远处柱面构成[16-17]。需满足的边界条件有:1)拉普拉斯方程海底边界条件z=-h;3)自由表面条件浸没物体表面条件辐射条件:辐射波无穷远处速度势趋近于0,即在上述边界条件中,φ为速度势函数;x,y和z为坐标轴;t为时间;n物体表面外法向矢量;h为水深;j=1,2,3,4,5和6分别代表物体的横摇、纵摇、艏摇、横荡、纵荡和垂荡六个运动模态;v j为第j个运动模态时物体表面流速矢量;f j(x,y,z)为第j个运动模态时物体表面的流线函数;R为流场与物体表面距离。
1.2 波浪力
由线性化的伯努利方程可求得结构物表面水动力压力(p)为

根据水动力压力性质不同,可将其分为3个部分:入射势所引起的Froude-Kriloff力(Ffk)、辐射势所引起的辐射力(Fd)以及绕射势引起的波浪绕射力(Fr)。一般将Froude-Kriloff力与波浪绕射力(Fr)合称为一阶波浪力(F1)[18-19],计算公式为

式中,ρ为流体密度;i=1,2,3…,6为相应的运动模态;n i为广义单位法线矢量的各分量;ω为浮标震荡的圆频率。
1.3 幅值响应算子(RAO)
浮体运动幅值响应算子(Response Amplitude Operators,RAO)是由波浪激励到浮体运动的传递函数,指浮体对应自由度运动幅值与波幅的比,表明在线性波浪作用下浮体的运动响应特征。以浮标的横摇运动为例,横摇RAO(RAOroll)为浮体在单位波幅规则波作用下关于波浪频率的横摇运动幅值函数[20-21],计算公式为

式中,θx为浮体横摇运动幅值;ξa为入射波波幅,即规则波单位波幅;g为重力加速度;DAFroll为横摇运动方程得到的动力放大系数;ω为入射波圆频率;β为入射波角度。
2 水动力分析
AQWA(Advanced Quantitative Wave Analysis)软件可解决浮体在环境载荷下的运动响应,在频域内的水动力分析可求解浮体的附加质量、附加阻尼、一阶波浪力和幅值响应算子等,其理论之一为三维势流辐射-绕射理论,可用于本文浮标频域仿真,计算和输出相应的水动力结果[22-25]。
2.1 浮标参数及建模

表1 浮标主要参数Table 1 Main parameters of buoy
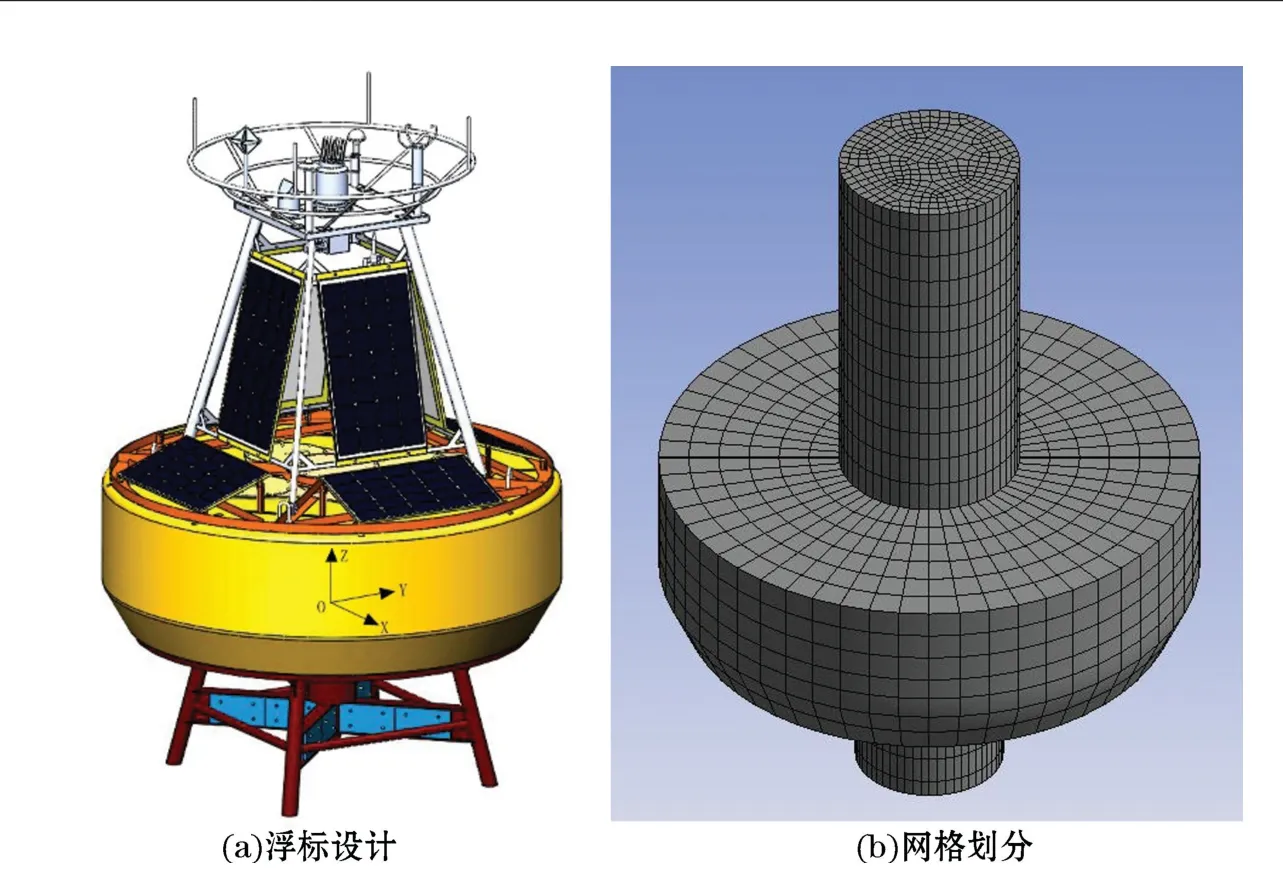
图1 浮标设计与浮标建模网格划分Fig.1 The buoy design and mesh of the buoy model
采用直径3 m的小型海洋资料浮标作为国产传感器深远海试验平台,该种型号的浮标具备造价低、承载能力强、易于运输和布放等优点。利用三维制图软件Solid Works设计了浮标的上架、浮体和下架的并将三者进行了装配,通过软件统计了浮标的设计参数(表1)。设计的浮标体上架和下架结构复杂不规则,为了提高AQWA软件对浮标进行水动力分析时的运行速度,在该软件里进行浮标建模时综合考虑浮标上架和下架的外形尺寸、受力投影面积和受力作用点等因素对浮标上架和下架进行简化。将浮标简化后的三维图导入AQWA后,首先进行水线切割,然后按照浮标设计参数设置全局变量和浮体的质量信息,最后考虑到频域计算时程序允许的频率范围和计算精度,按照0.3 m的网格大小对浮体进行网格划分以完成浮标建模。浮标设计图与浮标网格划分结果如图1所示。浮标在海水中沿着3个坐标的平移和绕着3个坐标轴的转动,共有6个自由度的运动,分别称为横荡、纵荡、垂荡、横摇、纵摇以及艏摇,坐标原点为浮标重心。由于浮标几乎左右对称,所以仅研究浮标横荡、横摇、垂荡和艏摇四个自由度的运动特征即可。浮标在海水中沿着X,Y,Z三个坐标的平移和绕着3个坐标轴的转动,共有横荡、纵荡、垂荡和横摇、纵摇以及艏摇六个自由度的运动,坐标原点为浮标重心。由于浮标几乎左右对称,所以水平方向仅研究浮标横荡和横摇运动;浮标的艏摇运动受波浪影响较小,因此在垂向上研究浮标的垂荡运动。
2.2 环境边界条件
2.2.1 工作海域环境参数
国产海洋气象水文传感器的深远海试验拟在我国南海开展,浮标设计与水动力计算时既要考虑南海海域常见的环境参数,也要考虑浮标运行时可能遇到的最恶劣环境。本文参考海洋行业标准《小型海洋资料浮标》[25](HY/T 143—2011)和《海洋资料浮标原理与工程》[26]对于浮标极限生存环境参数的要求,结合南海的实际海况,提出海洋物性监测仪浮标平台的试验海域极限环境参数如表2所示。

表2 浮标试验海域极限环境参数Table 2 Buoy limit living environment parameters
2.2.2 风载荷
风载荷主要作用位置为浮标上架安装的太阳能电池板和传感器以及浮体露出水面的部分,风载荷的大小取决于浮标受风部分的投影面积和等效形状、风力作用点的高度以及相应高度下的风速[28],计算公式如下:

式中,Fw为风载荷,ρ为海面空气密度(1.29 kg/m3),Aw为受风部分的投影面积,Ch为风力高度系数,查表取Ch=1[29],Cs为受风部分的风力形状系数,查表取Cs=0.5,Vh为高度h处对应的平均风速。
2.2.3 流载荷
海流因素同样是海洋浮标设计计算中的重要环境因素之一,海流对浮标主要影响表现为拖曳力[29],海流载荷的计算公式为

式中,Fc为海流载荷;ρ为海水密度(1025 kg/m3);Cd为海水拖曳力系数,Cd=1.6[30];Ac为浮标海流载荷受力投影面积;Vc为海流流速。
2.2.4 波浪谱参数设置
对浮标进行水动力分析时需选择合适的波浪谱,波浪经研究和观测被认为是一个广义的随机平稳过程,运用统计学方法可以用波浪谱的形式进行描述,波浪谱是波浪能量随不同频率(波数)、方向的分布[31-33]。
AQWA中内置了JONSWAP谱和P-M谱算法。与P-M谱相比,JONSWAP谱是在中等风况和有限风距的条件下测量修正得的,使用经验表明,JONSWAP谱是一种更普遍的波浪谱形式,可以适用于不同形成阶段的风浪[34-37],因此本文计算浮标水动力采用JONSWAP谱,在软件中通过设置最低频率、最高计算频率、需计算的波浪方向和波浪方向间隔等参数完成波浪谱的配置,软件中以X轴为波浪正方向,沿逆时针方向计算。在输出浮标表面压力和运动参数等结果时,可通过设置波浪的有效波高来输出不同能量波浪对浮标水动力特性产生的影响。
2.3 水动力计算结果
2.3.1 阻尼修正
三维势流理论的基本假设为流场中流体具备无旋、无黏和不可压缩的特点,因此使用AQWA软件对浮标进行水动力计算时会忽略海水黏性对浮标运动时产生的附加阻尼等影响,从而降低了水动力计算结果的准确性。因此,为了更准确地计算浮标的水动力性能,必须对三维势流理论的计算阻尼进行修正[38-39],即在参数设置时添加阻尼系数,以横摇运动为例,浮标单自由度运动临界阻尼计算公式为

式中,D为临界阻尼,I xx为横摇方向惯性矩,ΔI xx为附加质量惯性矩,KR为横摇方向刚度。附加质量惯性矩与横摇方向刚度可从静水计算结果中提取。
2.3.2 一阶波浪力
计算浮标受的一阶波浪力时,选择波浪的入射方向为RX方向,分别统计沿着波浪入射方向(RX方向)、垂直波浪入射方向(RY方向)和垂向(Z方向)的计算结果(图2)。在所有波浪入射方向中浮标沿着波浪入射方向受的一阶波浪力最大,垂直波浪入射方向浮标受的一阶波浪力最小。
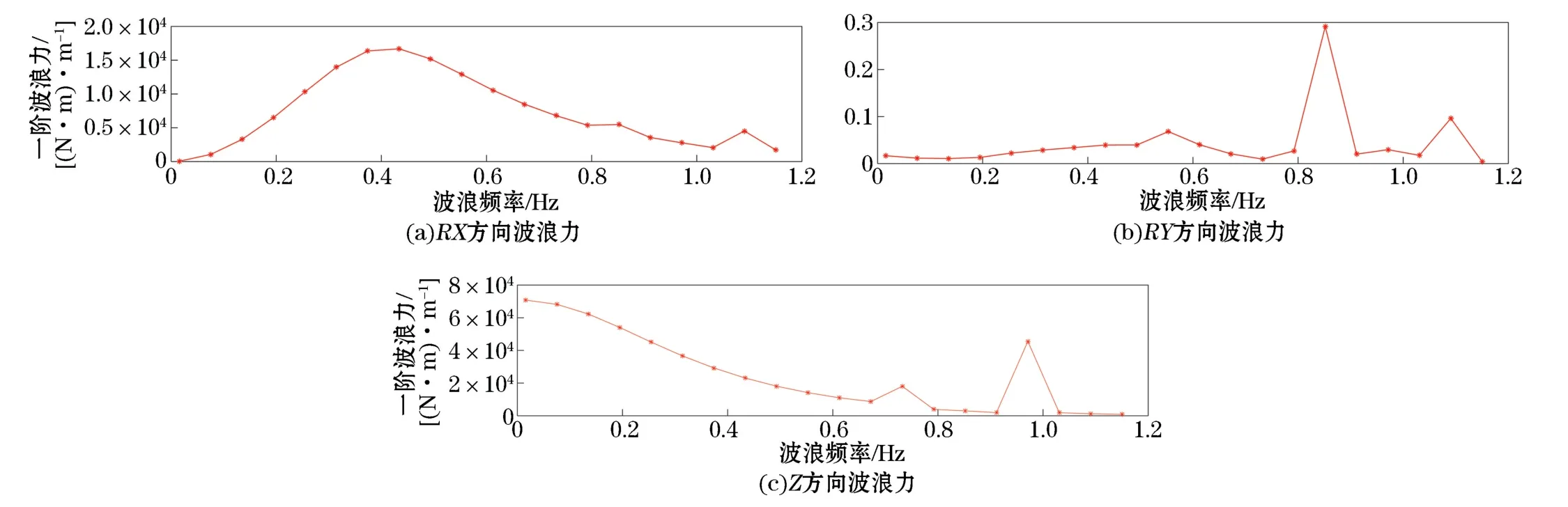
图2 浮标各个方向波浪力Fig.2 Wave forces in all directions of buoys
RX方向受到的一阶波浪力随着波浪频率的增加呈现先增大后减小的趋势;RY方向受到的一阶波浪力与RX方向相差5个数量级,说明垂直波浪入射方向产生的波浪力几乎对浮标没有影响,在水平方向上随着与波浪入射方向夹角增大,一阶波浪力对浮标的影响逐渐减小;Z方向上的波浪力随着波浪频率的增大而逐渐减小。布放海域的波浪频率集中在0.02~0.33 Hz范围内,该频率范围内RX方向每单位有义波高的波浪力最大值为14421.07 N,并未达到整个频谱范围内的最大值,没有倾覆的危险;Z方向上的波浪力在波浪频率集中范围内的每单位有义波高的波浪力最大值为:70791.25 N,通过该值可选择合适破断力的锚系,防止浮标出现断锚、走锚的危险。
2.3.3 附加质量和附加阻尼
附加质量和附加阻尼是浮标强迫简谐运动的稳态水动力和力矩,是由浮标在海水中强迫运动引起海水振荡并在浮标表面产生压力引起的。附加质量反映了浮标在海水表面做摇荡运动迫使浮标周围海水动量发生变化而对浮标产生的反作用力。附加阻尼是由于浮标在海水表面受波浪力进行运动后,在浮标周围生成向外扩散的辐射波以海水阻尼的形式反作用于浮体。
根据浮标的外形特点和浮标工作时的受力分布,选择横荡(X方向)、横摇(RX方向)和垂荡(Z方向),并分别统计附加质量和附加阻尼的计算结果(图3和图4)。由图3和图4可见,浮标在海水中各个方向附加质量和附加阻尼随着波浪频率的变化曲线,各个方向附加质量随着波浪的频率增加略有增加后平缓减小,其作用主要体现在低频波浪时;附加阻尼在X方向和RX方向主要作用于高频波浪时,Z方向上随波浪频率增加先增大后减小,作用频带较窄。综上,浮标在各个主要方向上受到的附加质量和附加阻尼随波浪频率变化平缓、幅值合理,说明设计的浮标在海洋中工作时受到的附加质量和附加阻尼会对浮标的运动产生一定的抑制作用,但是不会对浮标运行时的水动力性能产生过度的影响。
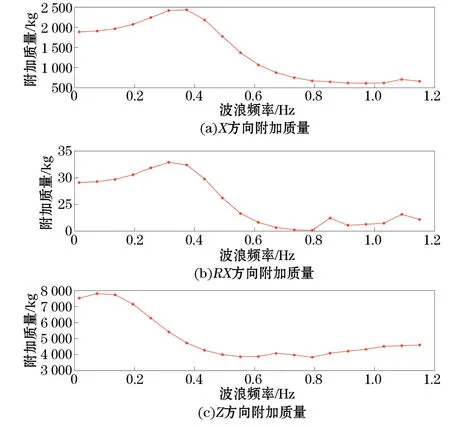
图3 浮标各个方向附加质量Fig.3 Add mass of the buoy in three directions
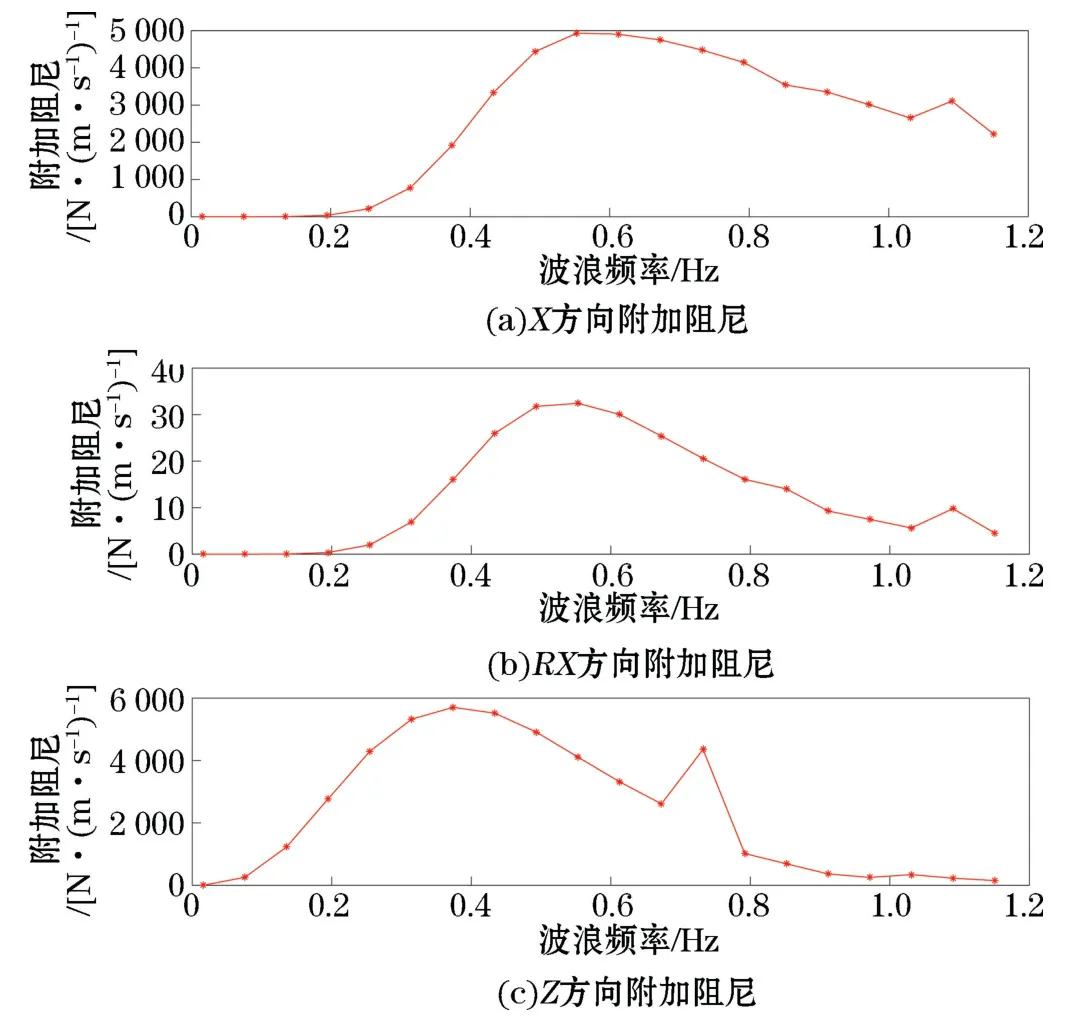
图4 浮标各个方向附加阻尼Fig.4 Rotation damping of the buoy in three directions
2.3.4RAO
图5为浮标水平方向和垂向的RAO值随波浪频率变化曲线,水平方向选取了横摇和横荡两个方向,垂向选择的垂荡方向,浮标垂向基本左右对称,故不考虑浮标艏摇RAO。当入射波与横摇方向垂直时,横摇方向上的RAO值最大,所以统计RX方向RAO值时设置入射波方向为90°;当入射波与横荡方向相同时,横荡方向上的RAO值最大,所以统计X方向RAO值时设置入射波方向为0°;Z方向RAO值与波浪入射方向无关。
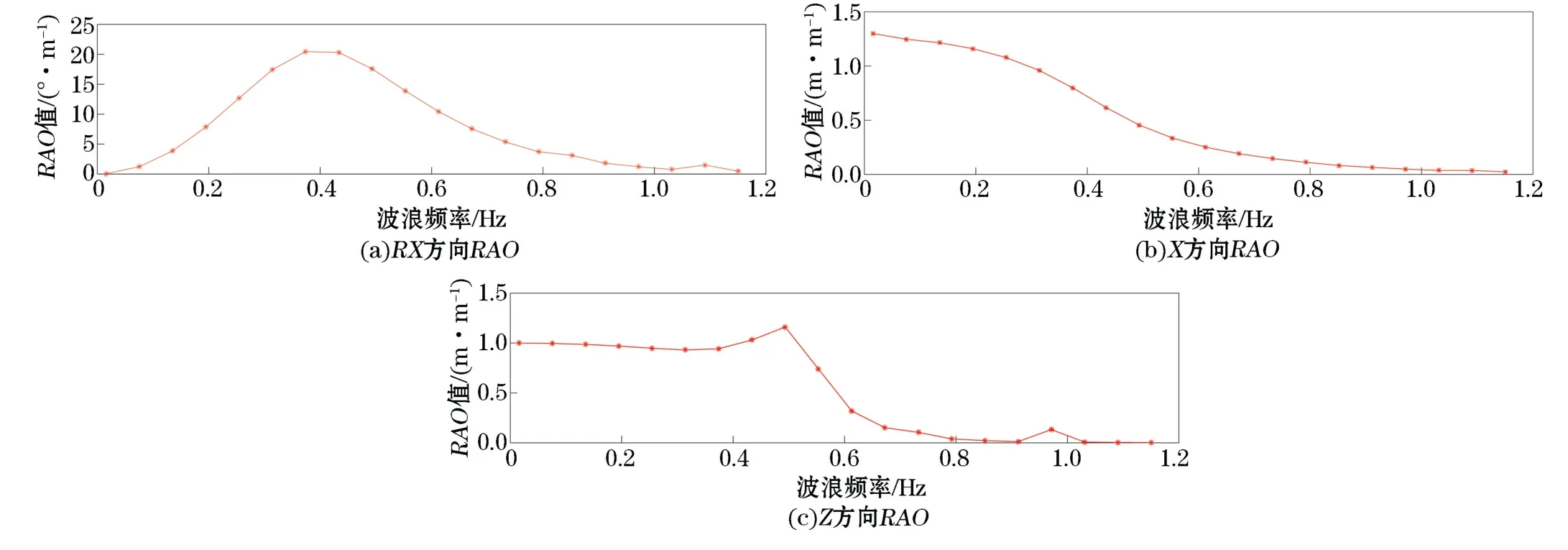
图5 浮标横摇、横荡和垂荡RAOFig.5 Roll,swaying and heave RAO of the buoy
在横摇方向上,RAO值随着波浪频率的增大先增大后减小,主要响应频率范围为0.19~0.67 Hz,最大值出现在波浪频率为0.37 Hz处,最大幅值为20.45°/m,其他频率范围内均幅值较小且变化平缓;X方向的RAO值基本随着波浪频率增大而平缓减小,且幅值合理;Z方向的RAO值在0.49 Hz处出现一个小幅度的增大后也逐渐减小,但部分曲线存在小幅值奇点,说明浮标下架结果还存在改进之处。
从3个运动自由度的RAO值随波浪频率的变化趋势和幅值极值等统计信息可以看出该浮标在各个方向上的结构设计较为合理,能够保证海洋中的浮标遇到不同频率的波浪时产生符合预期的运动响应。
3 结 语
本文以三维势流理论和波浪辐射-绕射理论为基础,综合考虑相关浮标设计标准的要求和项目示范试验海域的海况,使用AQWA软件对设计的3 m海洋资料浮标的水动力性能进行了频域分析,选取浮标运行时具有代表性的运动自由度方向,仿真和统计了各个方向上浮标的一阶波浪力、附加质量、附加阻尼和幅值响应算子随波浪频率的变化曲线。
分析一阶波浪力、附加质量和附加阻尼的曲线可知,浮标受到的一阶波浪力随着波浪频率变化较为平缓,各个受力方向上未出现受力激增的情况。浮标受到的附加质量力和阻尼力幅值合理,在一定程度增加了浮标的稳定性。在幅值加应算子响应分析中发现,浮标在工作时垂荡和横摇方向耐波性良好,工作时不会随波高的变化发生较大位移。以上计算结果的曲线变化率和幅值极值等统计特性表明,设计的浮标在波浪频率范围内受力合理,运动响应符合设计要求,具备足够的耐波性,能够稳定可靠的完成项目示范试验。
猜你喜欢
人民长江(2023年6期)2023-07-25 12:24:14
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
学苑创造·A版(2022年4期)2022-06-18 11:22:44
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58