
基于STFRFT的脉冲干扰抑制方法研究
2021-01-26 05:50王晓君薛琳博王彦朋
河北科技大学学报 2021年1期
王晓君 薛琳博 王彦朋


摘 要:为了解决航空无线电导航服务频段附近的脉冲干扰影响接收机工作的问题,并进一步提高GNSS系统的抗干扰能力,提出了基于STFRFT(short time fractional Fourier transform)的脉冲干扰抑制方法。首先确定接收信号的最佳旋转阶次,再对信号进行STFRFT,通过坐标旋转得到时频面的二维分布,在最佳阶次下采用自适应时变滤波器实现对干扰和信号的分离,进而抑制干扰。仿真结果表明,和几种传统方法相比,基于STFRFT的自适应滤波算法剔除干扰效果最好,在抑制脉冲干扰的同时保留了更多有用信号。结合STFRFT技术和自适应时变滤波技术提高了抑制脉冲干扰的能力,可为航空无线电导航服务的脉冲抗干扰技术提供参考依据。
关键词:信号检测;STFRFT;脉冲干扰抑制;最佳阶次;坐标旋转;时变滤波器
中图分类号:TN911 文献标识码:A
文章编号:1008-1542(2021)01-0015-07
在GNSS的建设和进行现代化改造的过程中会面临与航空无线电设备的电磁兼容的问题。伽利略E5、北斗B2和GPS L5等这些不同频点的卫星信号都是GNSS的重要组成部分,它们的中心频率和现有的航空无线电导航服务(aeronautical radio navigation services,ARNS)频段会发生重叠。ARNS频段附近工作的设备主要有测距仪(distance measuring equipment,DME)系统和塔康(tactical air navigation system,TACAN)系统,这些设备工作时都不可避免地产生脉冲干扰信号。研究调查表明,测距仪系统发射的大功率脉冲信号是影响GPS L5等卫星信号的主要因素[1],所以必须采取有效的干扰抑制手段,避免脉冲干扰影响卫星导航系统的正常工作。
目前抑制脉冲干扰常用的有时域脉冲消隐法、频域陷波法和时域频域结合等方法。时域消隐方法首先检测输入信号的幅度,然后把超过所设门限的信号置零,以此来抑制干扰信号,其缺点是会滤除在脉冲干扰较为集中区域的有用卫星信号,损失较为严重。文献[2]提出了频域陷波法,在频域里对脉冲干扰进行抑制,然后通过陷波滤波法剔除干扰,干扰抑制效果好于时域消隐法,但会滤除掉脉冲同频率处的有用信号。时频域结合法是上述2种方法的综合,干扰抑制效果优于上述2种方法。近年来,学者针对脉冲干扰又提出了很多有效的干扰抑制方法。文献[3]提出了小波包抑制脉冲干扰的方法,将接收信号通过小波包变换转变到小波包系数域中,通过比较系数的绝对值和阈值的大小界定干扰,但如果阈值选取不当,该方法在一定程度上也会丢失有用卫星信号。文献[4]提出了自适应空域脉冲抗干扰算法以剔除脉冲干扰,该方法涉及到阵列信号结构且需要计算求得信号的协方差矩阵,抑制效果较好但运算复杂。
由于来自不同DME站台的脉冲干扰信号是非平稳的,与噪声干扰和卫星信号之间存在较强的时频耦合,使得常见的干扰抑制方法难以有效地实现信号和干扰的分离。随着科学技术的快速发展,分数阶傅里叶变换(fractional Fourier Transform, FRFT)的研究逐渐成为热点。其对信号有良好的时频聚焦性质,是分析非平稳信号的新工具,在水波信号、地震信号、通信信号等领域应用广泛,且在处理复杂的时频重叠信号领域拥有广阔的应用前景。
本文从脉冲干扰的非平稳特性入手,研究了分数阶傅里叶变换抑制脉冲干扰的方法,在此基础上对信号进行加窗处理,探究短时分数阶傅里叶变换下脉冲的干扰抑制方法和性能,并与其他干扰抑制方法进行了分析比对。
1 系统模型
本文以GPS接收机为例,把包含噪声和脉冲干扰的卫星信号采样到中频进行处理,此时接收信号的模型为
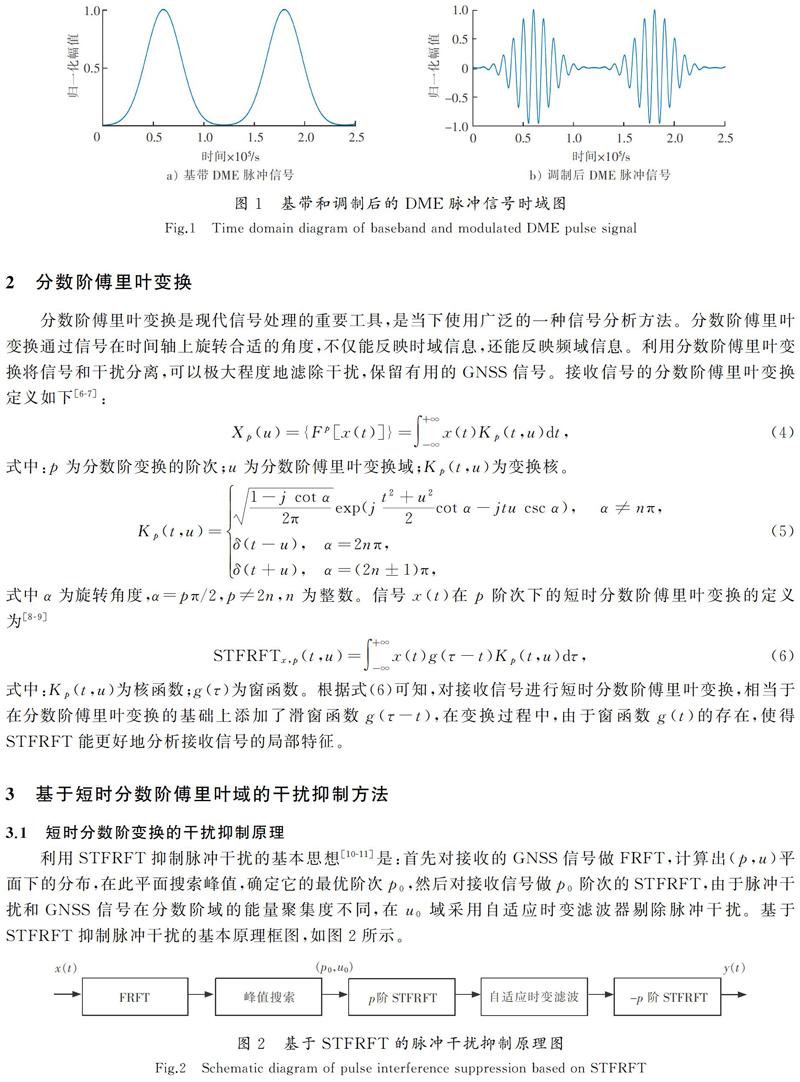
式中fJ和θJ为载波频率和载波相位。基带和调制后的DME脉冲信号时域图如图1所示。
2 分数阶傅里叶变换
分数阶傅里叶变换是现代信号处理的重要工具,是当下使用广泛的一种信号分析方法。分数阶傅里叶变换通过信号在时间轴上旋转合适的角度,不仅能反映时域信息,还能反映频域信息。利用分数阶傅里叶变换将信号和干扰分离,可以极大程度地滤除干扰,保留有用的GNSS信号。接收信號的分数阶傅里叶变换定义如下[6-7]:
3 基于短时分数阶傅里叶域的干扰抑制方法
3.1 短时分数阶变换的干扰抑制原理
利用STFRFT抑制脉冲干扰的基本思想[10-11]是:首先对接收的GNSS信号做FRFT,计算出(p,u)平面下的分布,在此平面搜索峰值,确定它的最优阶次p0,然后对接收信号做p0阶次的STFRFT,由于脉冲干扰和GNSS信号在分数阶域的能量聚集度不同,在u0域采用自适应时变滤波器剔除脉冲干扰。基于STFRFT抑制脉冲干扰的基本原理框图,如图2所示。
由于对干扰抑制都是基于最优阶次下进行的,为了得到更好的干扰抑制效果,确定最优阶次尤为重要。传统的二维搜索方法在搜索过程中必须选择较小的搜索步长才会满足精度要求,这便增加了计算的复杂度。本文采用牛顿迭代方法[12],其是一种用目标函数在点x0处的二阶泰勒展开式代替目标函数的近似方法,迭代公式为
3.2 自适应时变滤波器
自适应时变滤波器是对传统带通滤波器的一个改进,能更好地适应脉冲实时变化的特性,在每个时刻时变滤波器的中心频率会随着接收信号的瞬时频率自适应发生改变,且对于处理多分量信号有着良好的效果。设接收信号为xi(t),自适应时变滤波器的基本思想如下[13-15]。
在STFRFT的基础上对信号进行时变滤波的方法可以概括为3个步骤:分析、加重和综合。其中加重函数M(t,u)在通域内的值为1,在通域之外的值为0。Mi(t,u)代表第i个接收信号的自适应时变滤波器,时变滤波器可以理解为在GNSS有用信号的时频域能量聚集处M(t,u)=1,在干扰区域M(t,u)=0。
首先,对接收信号在p0阶次下做STFRFT,获得待处理信号,得到时间和分数阶域的二维分布;然后,将二维分布与M(t,u)相乘,保留有用GNSS信号,抑制通域之外的干扰和噪声;最后,对干扰抑制后的无干扰信号进行逆变换到时域,重构得到无干扰的脉冲信号[16-17]。这种自适应时变滤波方法也是在时频域中容易实现的方法,且能跟随脉冲干扰瞬时频率的变换自适应抑制干扰。
短时分数阶傅里叶域脉冲干扰抑制的具体步骤总结如下[18-20]:
1)由于分数阶傅里叶变换具有周期性,所以变换阶次p只需考虑[0,2]区间即可,对接收到的混有脉冲干扰的GNSS信号x(t)进行分数阶傅里叶变换,得到信号能量在(p,u)平面的二维分布。在此二维平面上寻找模的最大值,得到最大值点处的坐标(p0,u0)。
2)对接收到的带有脉冲干扰的GNSS信号在p0阶次下做短时分数阶傅里叶变换,求得旋转角度α0(α0=p0π/2),此时的α0便是最佳旋转角度。
3)由于接收信号中有用信号和干扰在u域的能量聚集度不同,所以采用以u0为中心的自适应时变滤波器对干扰分量进行抑制。
4)对滤波器剔除脉冲干扰后的信号进行-p0阶的变换(即p0阶次的逆变换),便可得到抑制脉冲干扰后有用的GNSS信号,实现了信号与干扰的分离。
4 仿真结果与分析
通过实验仿真生成GPS信号,设置信噪比为-18 dB,采样频率为5 MHz,中频频率为1.25 MHz,仿真实验中的观测时间为1 ms。
根据本文模型进行实验仿真,得到如图3所示含有脉冲干扰的接收信号时域波形。将接收信号进行分数阶傅里叶变换,如图4所示,可以看出能量聚集在1.0附近。
仿真实验对接收信号在(p,u)二维平面进行扫描得出最佳分数阶傅里叶变换的阶次为p=1.02。接收信号在不同阶次p=0.7,0.9,1.2和1.5时分数阶傅里叶域图如图5所示,在最佳阶次p=1.02时,分数阶傅里叶域图如图6所示,可以明顯看出在p=1.02时,能量最为集中,在此阶次下通过滤波器滤除脉冲干扰,之后将信号转换到时域,得到最终无干扰的有用GNSS信号。
将接收信号在最佳变换阶次下通过滤波器滤除脉冲干扰,再将滤除脉冲干扰后的信号转换到时域,得到最终无干扰的有用GNSS信号。从图7抑制干扰后的信号时域波形对比可以看出本文方法能充分地抑制干扰,同时也可以有效地保留有用信号。
为进一步研究短时分数阶傅里叶变换的干扰抑制性能,本文根据干扰滤除前后的均方根误差(RMSE)随干噪比的变化来比较各种方法的抗干扰效果。RMSE计算公式为[21]
式中:N为信号的长度;x(n)为原始无干扰信号;[AKx^](n)为干扰抑制后的信号。为验证基于STFRFT的自适应时变滤波器的干扰抑制性能,将其与传统的STFRFT干扰抑制方法和几种常见的方法作对比。由图8可知,短时分数阶傅里叶变换干扰抑制后的均方根误差更小,干扰抑制性能优于其他几种方法。
5 结 语
本文对基于短时分数阶变换的脉冲抗干扰算法进行了研究,对接收的含有脉冲干扰的信号在最佳阶次下进行短时分数阶傅里叶变换,并结合自适应时变滤波器对脉冲干扰进行抑制,有效剔除了脉冲干扰,达到了干扰抑制目的,提高了GNSS系统的抗干扰性能。将短时分数阶傅里叶变换和其他几种方法抑制脉冲后的效果进行对比,显示出短时分数阶傅里叶变换在处理脉冲这类非平稳信号方面的优越性。
本文仅仅是针对一种脉冲情况进行了研究,未来将考虑复杂脉冲干扰情况,以研究出一种稳健的抗干扰算法。
参考文献/References:
[1] ONRUBIA R, QUEROI J, PASCUAL D, et al. Assessment of DME/TACAN RFI mitigation techniques in GNSS-R[C]//Geoscience & Remote Sensing Symposium. [S.l.]: IEEE, 2016:1-5.
[2] DENKS H, HORNBOSTEL A, CHOPARD V. GNSS receiver testing by hardware simulation in an standardized pulsed and CW interference environment[C]//ENC-GNSS 2009.[S.l.]:[s.n.],2009.
[3] 李流丽.基于小波变换的GNSS中DME脉冲干扰抑制方法[D].天津:中国民航大学,2015.
LI Liuli. DME Pulsed Interference Suppression Method Based on Wavelet Transformation for GNSS[D]. Tianjin: Civil Aviation Univer-sity of China, 2015.
[4] 张家连,郎荣玲,赵辰乾,等.GNSS中的脉冲干扰自适应空域抑制算法[J].太赫兹科学与电子信息学报,2020,18(1):43-49.
ZHANG Jialian, LANG Rongling, ZHAO Chenqian, et al. Pulsed interference adaptive spatial processing algorithm in GNSS[J]. Journal of Terahertz Science and Electronic Information Technology, 2020, 18(1): 43-49.
[5] 方偉,吴仁彪,卢丹,等.基于修正GAPES的GPS脉冲干扰抑制方法[J].信号处理,2011,27(12):1860-1864.
FANG Wei,WU Renbiao,LU Dan,et al.A new pulse interference suppression method in GPS based on modified GAPES[J].Signal Processing,2011,27(12):1860-1864.
[6] 李家强,金荣洪,耿军平,等.基于高斯短时分数阶傅里叶变换的多分量LFM信号检测与参数估计[J].电子与信息学报,2007,29(3):570-573.
LI Jiaqiang,JIN Ronghong,GENG Junping,et al.Detection and estimation of multi-component LFM signals based on gauss short-time fractional Fourier transform[J].Journal of Electronics & Information Technology,2007,29(3):570-573.
[7] 刘秉瑞,粟嘉.基于FrFT的自适应宽带干扰抑制算法[J].中国电子科学研究院学报,2016,11(3):319-325.
LIU Bingrui,SU Jia.FrFT based adaptive interference suppression algorithm for time-varying wide-band interference[J].Journal of China Academy of Electronics and Information Technology,2016,11(3):319-325.
[8] 栾俊宝,邓兵.短时分数阶傅里叶变换对调频信号的时频分辨能力[J].电讯技术,2015,55(7):773-778.
LUAN Junbao,DENG Bing.Time-frequency resolving ability of short-time fractional Fourier transform to FM signals[J].Telecommunication Engineering,2015,55(7):773-778.
[9] 庞存锁,刘磊,单涛.基于短时分数阶傅里叶变换的时频分析方法[J].电子学报,2014,42(2):347-352.
PANG Cunsuo,LIU Lei,SHAN Tao.Time-frequency analysis method based on short-time fractional Fourier transform[J].Acta Electro-nica Sinica,2014,42(2):347-352.
[10]李希友,黄福锦.基于FRFT的强时频干扰抑制方法[J].舰船科学技术,2017,39(6):83-87.
LI Xiyou,HUANG Fujin.Reverberation suppression based on fractional Fourier transform[J].Ship Science and Technology,2017,39(6):83-87.
[11]张天鹏,刘忙龙,谢嘉.基于FRFT的调频引信LFM干扰抑制改进方法[J].探测与控制学报,2019,41(2):22-25.
ZHANG Tianpeng,LIU Manglong,XIE Jia.Improvement of FM fuze LFM interference suppression based on FRFT[J].Journal of Detection & Control,2019,41(2):22-25.
[12]TAO R, LI Y L, WANG Y. Short-time fractional Fourier transform and its applications[J]. IEEE Transactions on Signal Processing, 2010, 58(5):2568-2580.
[13]LI Y, SHA X, YE L. An SC-FDMA inter-cell interference suppression method based on a time-varying filter[C]//Computer Communications Workshops. [S.l.]: IEEE, 2016:909-914.
[14]刘雪娇.基于时变滤波的干扰抑制技术[D].哈尔滨:哈尔滨工业大学,2018.
LIU Xuejiao. Interference Suppression Technique Based on Time-varying Filter[D]. Harbin: Harbin Institute of Technology, 2018.
[15]陈向民,黎琦,张亢,等.变转速齿轮箱复合故障的自适应时变滤波分析[J].振动与冲击,2019,38(14):138-145.
CHEN Xiangmin, LI Qi, ZHANG Kang, et al. Adaptive time-varying filtering method for gearbox compound fault diagnosis under variable rotational speed[J]. Journal of Vibration and Shock, 2019, 38(14): 138-145.
