
一种磁轴承开关功放的半周期控制方法
2021-01-25 03:23:22仇志坚
微特电机 2021年1期
吴 凡,仇志坚
(上海大学 机电工程与自动化学院,上海 200444)
0 引 言
在磁悬浮轴承控制系统中,全桥结构开关功放在实际运用中对电流有良好的跟踪效果[1-4]。目前,磁轴承开关功放的控制策略主要有最大电流误差控制、节点电位控制法和单周期控制等[5-8]。最大电流误差控制在模拟控制中实现简单、控制精度高,但在数字控制中效果不好;节点电位控制包含PID控制算法,对磁轴承参数敏感;数字单周期控制是利用开关变换器的脉冲调制和非线性特性,实现对实时电压和电流的瞬时控制,具有控制精度高和响应速度快等优点,可以提高磁悬浮轴承控制系统性能[9-12]。
文献[13]分别在单、双极性单周期控制中,仅考虑电感特性推导了单周期控制数学模型,通过仿真实验验证了其合理性,并运用于五相六桥臂开关功放电路中控制五自由度的磁轴承电机,获得良好的控制效果。文献[14]考虑了磁轴承线圈电阻特性,对原有的单周期控制数学模型算法进行优化,并在电流均值和终值跟踪方法下对单、双极性单周期控制进行比较,仿真验证了其合理性。文献[15]根据单周期控制原理,分析其系统存在延时的因素及其对系统稳定性造成的影响,提出了通过传递函数和傅里叶分解法添加延时补偿项,设计出两种延时补偿模型,仿真和实验分析验证其可行性。
上述文献的数字单周期控制算法中,是在每个周期初始时刻采样电流,并与参考电流比较来计算占空比,并用于当前整个周期内的PWM信号产生。但是该周期内由于前半周期的控制使得实际电流变化,后半周期延用前半周期的占空比将无法获得精确的控制电流。本文通过采用半周期控制思想,在一个周期中点处再次采样实际电流并计算占空比及判断工作模态,以此减小电流误差来提高电流控制精度。此外,针对传统单周期控制方法中采用极限简化占空比计算的不足,提出了一种基于泰勒级数展开的占空比计算方法。最后与传统单周期控制进行了MATLAB仿真对比,磁轴承系统仿真结果验证了半周期控制策略的可行性和优越性。
1 磁轴承电流型全桥开关功放半周期控制算法
1.1 半周期控制原理
以图1中双极性单周期均值法控制Δi<0为例,在一个周期内电流下降的幅值偏大,经过一个周期开关管的工作状态后可能与给定参考电流iref(iavg)偏差过多影响电流控制精度。半周期控制在三角波的中点再次采样实际电流,并根据其与参考电流之间的误差大小来推算后半周期的占空比。如图1所示,中点处的电流误差Δi2要比初始时刻电流误差Δi1小,使得后半周期的占空比比前半周期的要小。由图1电流波形发现,在半周期控制方法下,可有效减小一个周期内实际电流与参考电流之间的误差,以此提高磁轴承系统对轴承线圈电流的控制精度。

图1 单周期与半周期控制原理图
1.2 双极性调制下的半周期控制算法
单相全桥拓扑如图2所示。开关管S1,S3为上桥臂,S2,S4为下桥臂,双极性调制中S1,S4和S2,S3互补导通。图3为双极性控制算法下的控制波形图。分Δi≥0和Δi<0两种情况,每种情况都以半个周期分2个阶段进行分析,一个周期共4个阶段。图3考虑了前后半周期参考电流iref的变化。

图2 单相全桥开关功放拓扑

图3 双极性半周期控制波形图
1) 推导前半周期的占空比数学模型
在t0~t1时刻,S1,S4导通,S2,S3断开,电流上升;在t1~t2时刻,S2,S3导通,S1,S4断开,电流下降;根据电路状态方程求得电流在t1和t2时刻的电流值i1和i2:
(1)
(2)
式中:Udc为全桥功放的直流母线电压;L和R分别为磁轴承线圈的电感和电阻;D为S1,S4开关管的占空比;TS为载波周期。
前半周期电流变化量Δi:

(3)

(4)
令:
若将每半个周期内电流平均值作为被控量使其跟上给定值,即iavg=iref,而给定值设定为每个采样周期的初始值,那么每半个开关周期内的被控量可用给定值表示:
(5)
将式(4)和式(5)结合得到占空比D的表达式形如二次方程的根:
(6)
若将每半个周期内电流的终值作为目标,要求其跟上给定值,即i2=iref;同理,可以解得前半周期占空比D的表达式:
(7)
2) 推导后半周期的占空比数学模型
在t2~t3时刻,S1,S4导通,S2,S3断开,电流上升;t3~t4时刻,S2、S3导通,S1、S4断开,电流下降;根据电路状态方程求得t3和t4时刻的电流值:
(8)
(9)
可得半个周期内Δi的表达式:

(10)
按均值法求得占空比D的表达式:
(11)
按终值法求得占空比D的表达式:
(12)
1.3 单极性调制下的半周期控制算法
在单极性调制下,S3,S4互补且处于恒通或恒断状态,S1,S2互补且处于PWM状态。当Δi≥0时,S3关断,S4导通;当Δi<0时,S4关断,S3导通;图4为单极性控制波形图。第一个周期为Δi≥0的情况,第二个周期为Δi<0的情况。图4考虑了前后半周期参考电流iref的变化。

图4 单极性半周期控制波形
(1) Δi≥0
此情况下,S3恒断S4恒通,磁轴承线圈只有正向导通和正向续流两种状态。
1) 推导前半周期的占空比数学模型
在t0~t1时刻,S1,S4导通,S2,S3断开,电流上升;t1~t2时刻,S2,S4导通,S1,S3断开,电流为正向续流状态;根据电路状态方程求得t1和t2时刻的电流值:
(13)
i2=i1e-R(1-D)TS/(2L)
(14)
可得半个周期内Δi的表达式:
(15)
按均值法求得占空比D的表达式:
(16)
按终值法求得占空比D的表达式:
(17)
2) 推导后半周期的占空比数学模型
在t2~t3时刻,电流为续流状态;t3~t4时刻,电流上升;根据电路状态方程求得t3和t4时刻的电流值:
i3=i2e-R(1-D)TS/(2L)
(18)
(19)
可得半个周期内Δi的表达式:
(20)
按均值法求得占空比D的表达式:
(21)
按终值法求得占空比D的表达式:
(22)
(2) Δi<0
此情况下,S3恒通S4恒断,磁轴承线圈只有反向导通和反向续流两种状态。
1) 推导前半周期的占空比数学模型
在t0~t1时刻,电流为续流状态;t1~t2时刻,电流为反向导通状态;根据电路状态方程求的电感电流在t1和t2时刻的电流值:
i1=i0e-RDTS/(2L)
(23)
(24)
可得半个周期内Δi的表达式:
(25)
按均值法求得占空比D的表达式:
(26)
按终值法求得占空比D的表达式:
(27)
2) 推导后半周期的占空比数学模型
在t2~t3时刻,电流为下降状态;t3~t4期间,电流为续流状态;根据电路状态方程求得t3和t4时刻的电流值:
(28)
i4=i3e-RDTS/(2L)
(29)
可得半个周期内Δi的表达式:
(30)
按均值法求得占空比D的表达式:
(31)
按终值法求得占空比D的表达式:
(32)
2 仿真验证
本文在四自由度磁轴承系统上验证半周期控制方法的性能,图5为四自由度磁轴承开关功放半周期控制系统图,由控制器、开关功放和传感器组成。磁轴承转子的动力学方程组如下:

图5 四自由度磁轴承开关功放半周期控制框图
(33)
式中:xc,yc为转子质心点位置;α,β分别为质心点绕x轴和y轴的转角;磁轴承A、B处转子沿x和y方向的电磁力分别为Fxa,Fxb,Fya,Fyb;对应线圈中的控制电流分别为ixa,ixb,iya,iyb。
将磁轴承系统半周期与单周期控制方法进行对比,MATLAB仿真参数如表1所示。

表1 仿真参数
2.1 半周期电流性能仿真分析
因为电流的跟踪效果直接影响磁轴承起浮和稳态悬浮的性能,所以本文首先进行了电流的阶跃信号和正弦信号的仿真分析。
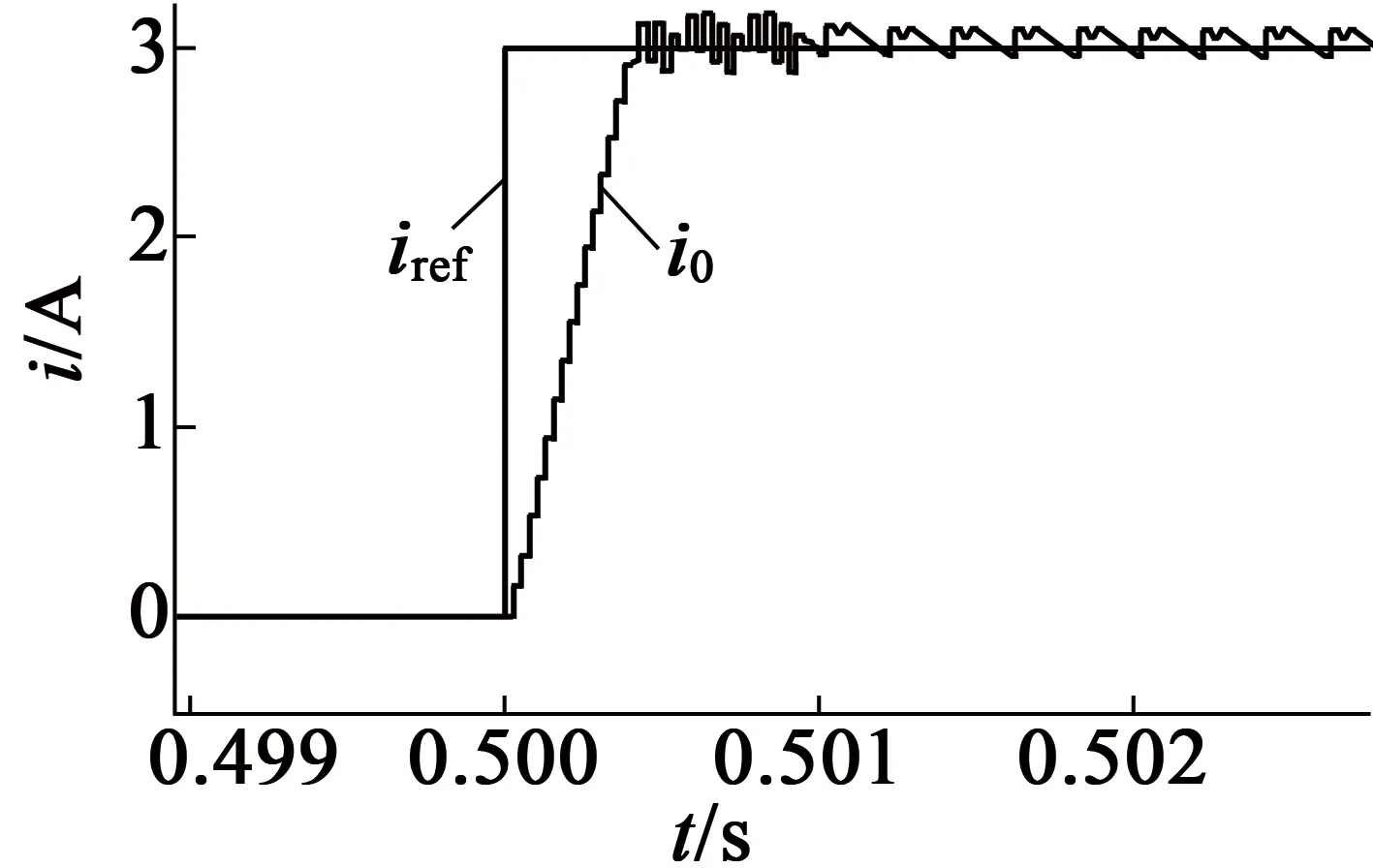
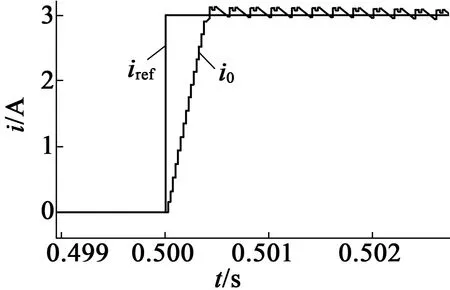
图6为给定阶跃响应信号幅值为3 A的仿真结果,i0为实际电流,iref为参考电流,图6(a)~图6(d)分别为双极性半周期均值、终值控制和单极性半周期均值、终值控制的仿真结果。从图6中可以看出,4种方法都可以实现电流的稳态输出,但双极性控制方法电流纹波大,实际电流与参考电流的误差也大。

(a) 双极性半周期均值法

(b) 双极性半周期终值法
(c) 单极性半周期均值法
(d) 单极性半周期终值法
图7为正弦信号仿真结果,参考信号频率为50 Hz,幅值为3 A,图7(a)~图7(d)分别为双极性半周期均值、终值和单极性半周期均值、终值控制的仿真结果。4种方法都能实现电流的快速跟踪,双极性的电流纹波要比单极性大;无论是单极性还是双极性,终值法存在一定的滞后;可见,单极性终值法性能最好。

(a) 双极性半周期均值法

(b) 双极性半周期终值法

(c) 单极性半周期均值法

(d) 单极性半周期终值法
2.2 半周期和单周期控制仿真比较
与传统单周期算法对比了阶跃信号下上升时间、电流纹波、稳态电流误差,以及正弦信号下的THD,结果如表2所示。

表2 半周期和单周期控制仿真比较结果
采用半周期控制能有效提高电流动态响应速度、减小电流稳态误差和谐波含量。双极性半周期均值法可降低14%的上升时间、39%的电流纹波和3.54%的THD,终值法可降低2.3%的上升时间、35%的电流纹波和2.38%的THD;单极性半周期均值法可降低12.7%的上升时间、57%的电流纹波和3.38%的THD,终值法可降低5.4%的上升时间、45%的电流纹波和2.27%的THD。
综上分析可见,半周期单极性终值法的效果最好。
2.3 磁轴承位移性能仿真分析
在前述仿真分析和比较结果基础上,本文选用单极性终值法下的单/半周期方法,进行了磁轴承仿真分析对比。
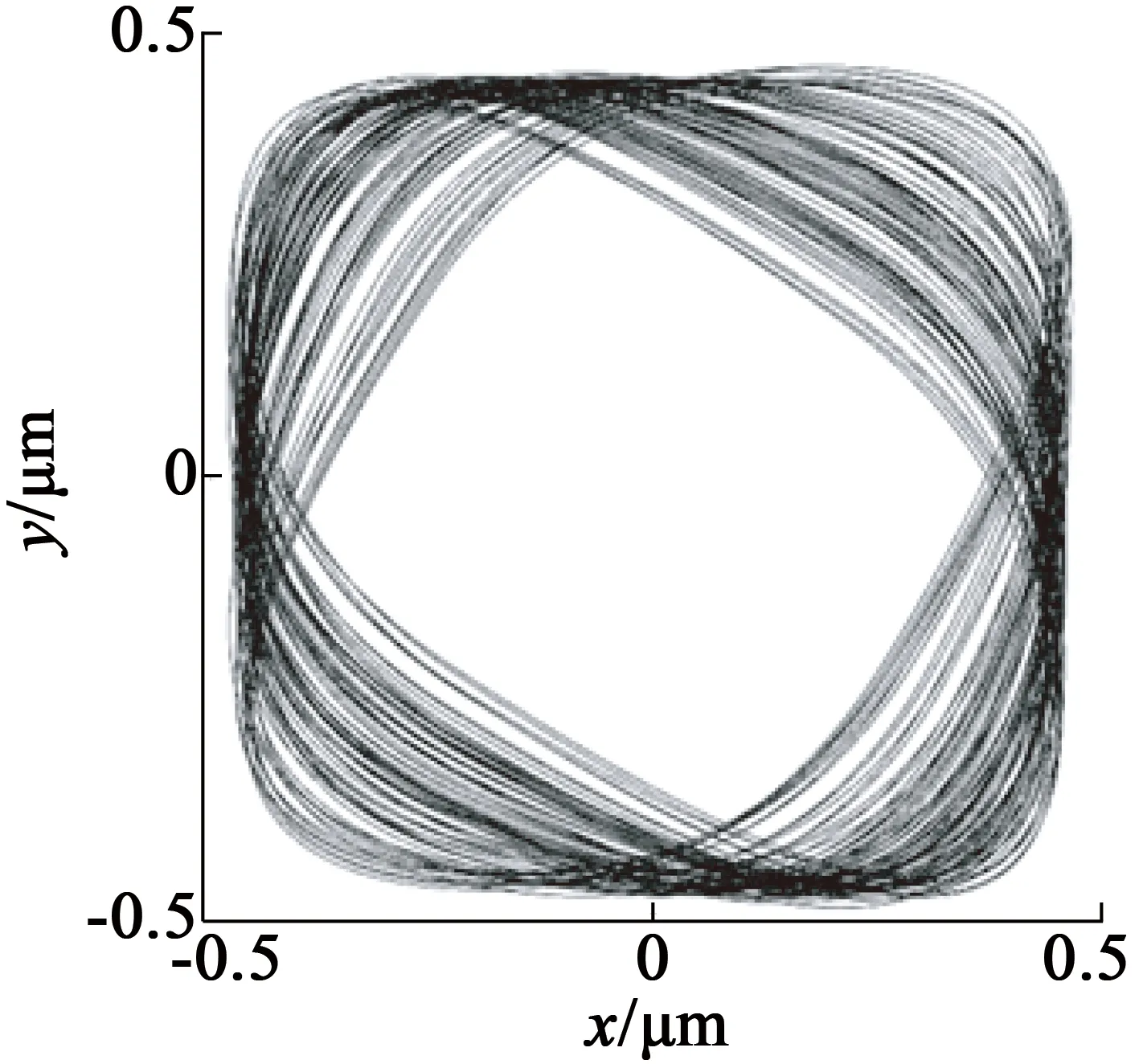
图8和图9分别为两种控制方法比较的磁轴承A和B的轴心轨迹图。可以发现,磁轴承A和B轴心轨迹呈近似椭圆形,其中半周期控制方法下轴心运动轨迹中心位置为(0.1 μm,0.1 μm),相对于原点平衡位置存在偏移,但其轨迹最大偏移量均比单周期控制方法要小0.15 μm左右。

(a) 半周期控制

(b) 单周期控制

(a) 半周期控制
(b) 单周期控制
图10为两种控制方法比较的磁轴承质心点的轴心运动轨迹图。可以发现,磁轴承质心点轴心轨迹都始终绕原点做椭圆运动,且半周期的轨迹最大偏移量比单周期控制方法要小0.25 μm左右。
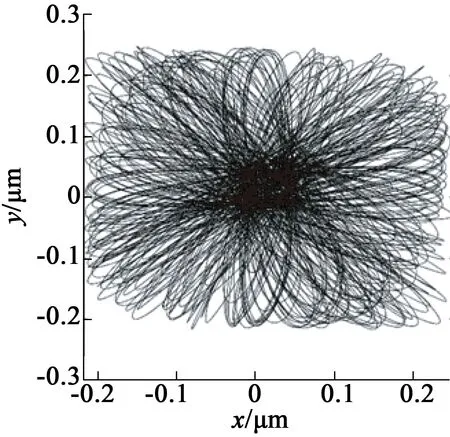
(a) 半周期控制

(b) 单周期控制
综上分析可以发现,尽管在半周期控制方法下,磁轴承A,B的轴心轨迹的中心存在偏移,但其转子质心点处的轴心轨迹中心仍然在平衡位置处,且无论是磁轴承A,B还是转子质心点处,半周期控制下转子轴心运动轨迹最大偏移量都要比单周期控制小;即半周期控制效果要比单周期控制效果好。
3 结 语
本文提出了一种半周期控制算法,推导了单/双极性均值法、终值法的占空比数学模型,建立了四自由度磁轴承开关功放半周期控制系统并与单周期控制进行了MATLAB对比仿真,得到以下结论:
(1) 半周期控制能提高电流动态响应速度,减小电流的稳态误差和电流谐波含量;
(2) 半周期单极性终值法的电流纹波和谐波含量THD要优于其他方法;
(3) 半周期控制方法下,磁轴承A,B和转子质心点处的转子轴心位移控制效果都要比单周期的要好。
猜你喜欢
莆田学院学报(2021年5期)2021-11-13 06:36:38
甘肃科技(2020年20期)2020-04-13 00:30:22
光源与照明(2019年4期)2019-05-20 09:18:18
债券(2017年5期)2017-06-02 14:57:24
电镀与环保(2016年3期)2017-01-20 08:15:32
中国国情国力(2016年1期)2016-11-26 04:07:15
电测与仪表(2016年1期)2016-04-12 00:35:12
电子器件(2015年5期)2015-12-29 08:43:41
电源技术(2015年1期)2015-08-22 11:16:26
电子设计工程(2014年8期)2014-02-27 11:57:32
