
基于视觉的铁路接触网几何参数检测方法
2021-01-22 10:33彭登全,刘小溪,张金红,景江,聂晶鑫
今日自动化 2021年12期
彭登全,刘小溪,张金红,景江,聂晶鑫

[摘 要]针对铁路接触网几何参数检测的需要,提出了一种基于视觉的铁路接触网几何参数检测方法。该方法利用结构光视觉测量系统获取接触网几何特征图像,通过模板匹配的方法获取图像中的检测点,带入成像公式求出接触网导高与拉出值。应用方面,在西安地铁1号线、大西高铁(西安北段)线路延长线上进行了线路测试。结果表明,基于视觉的接触网几何参数检测方法精度高、稳定性好,具有广阔的应用前景。
[关键词]接触网几何参数检测;结构光视觉测量;模板匹配
[中图分类号]U225 [文献标志码]A [文章编号]2095–6487(2021)12–0–02
Vision-Based Detection Method of Railway Catenary Geometric Parameters
Peng Deng-quan,Liu Xiao-xi,Zhang Jin-hong,Jing Jiang,Nie Jing-xin
[Abstract]Aiming at the need of detecting geometrical parameters of railway catenary, a vision-based method for detecting geometrical parameters of railway catenary is proposed. The method uses structured light vision measurement system Acquire the geometric feature image of the catenary, obtain the detection points in the image by the method of template matching, and bring in the imaging formula to calculate the catenary conduction height and pull-out value. In terms of application, in Xi’an Metro Line 1,A line test was carried out on the extension line of the Daxi high-speed railway (Xi'an north section). The results show that the vision-based method for detecting geometric parameters of the catenary has high accuracy and good stability, and has broad application prospects.
[Keywords]detection of catenary geometric parameters; structured light vision measurement; template matching
接触网导线通过与电力机车受电弓的直接接触,将电能传递到车辆,保证连续可靠的的电流供应。接触线与受电弓之间接触性能的好坏直接影响车辆取流质量。导高和拉出值是两个最为重要的接触网几何参数[1],需要控制在一定的范围内。导高过高,会导致受电弓离线产生电弧烧损接触线和受电弓,导高过低则会危及人员的安全。导高变化率过大时,容易产生电弧影响受流质量加大滑板磨损。拉出值过大会造成刮弓、断线等事故,过小会造成滑板的局部磨损。在电气化铁路的日常运营维护中,定期测量接觸网的导高和拉出值对保障线路的正常运行十分必要[2-3]。
基于视觉的铁路接触网几何参数检测方法,利用激光器和面阵相机通过光学原理测量出接触网的导高和拉出值,相较于传统的人工定点检测,具有自动化程度高、动态精度好、检测速度快等优点,具有广阔的应用前景和市场价值[4-5]。
1 系统测量基本原理
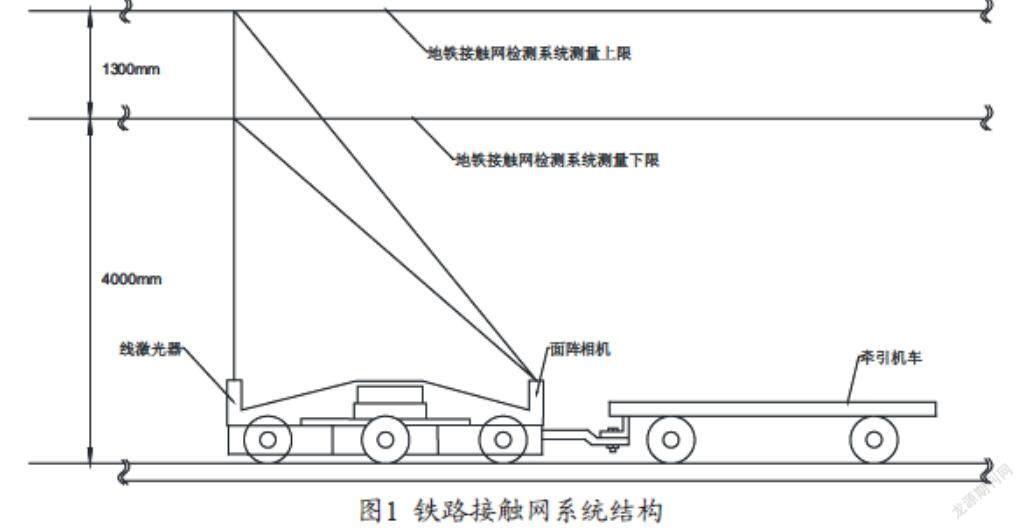
文章介绍的接触网检测系统其测量原理基于结构光测量法,使用单台面阵相机和单台线激光器,构成接触网检测系统。面阵相机与线激光器的安装位置关系如图1所示。线激光器所在平面与参考平面垂直,并朝上方照射,形成结构光特征。面阵相机光轴与参考平面成一定夹角,相机光心点位置参考平面上。通过相机采集接触网表面特征图像,通过图像处理算法提取出待测特征点信息,带入成像公式计算出所需的导高和拉出值[6-7]。测量系统数学模型如下:
(1)
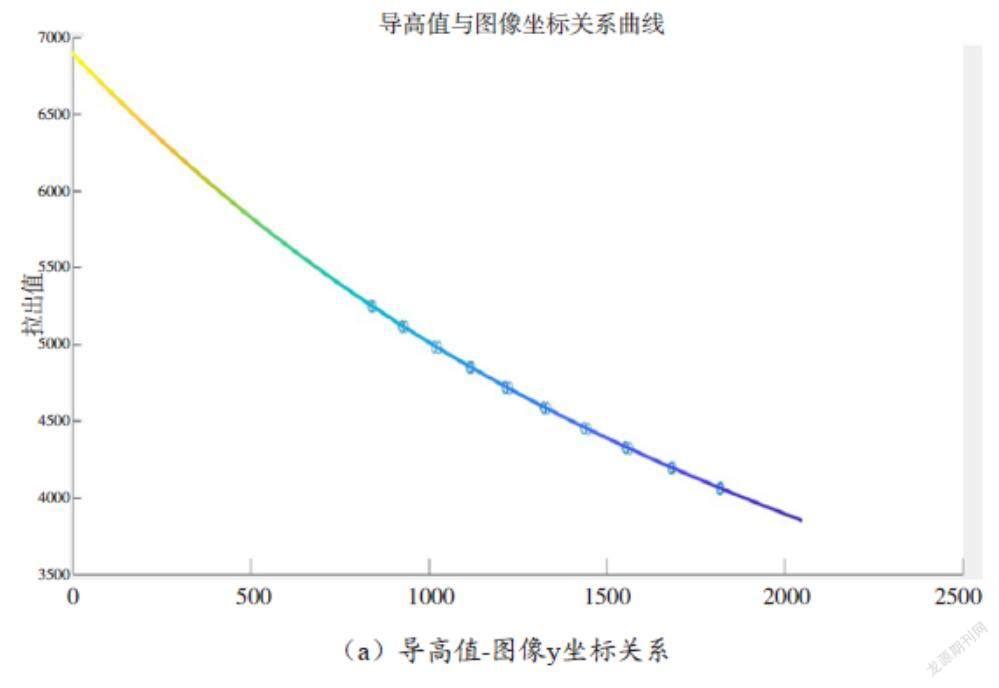
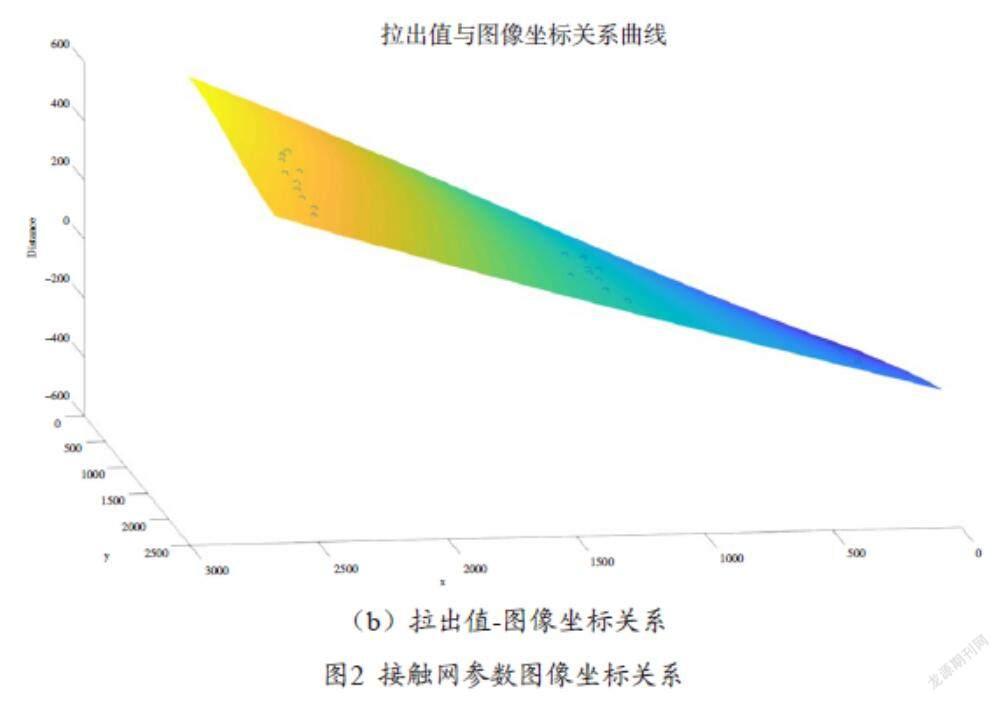
式(1)中,Height为接触网导高值(即接触网线下切点距离轨顶面距离),Stagger为接触网拉出值(接触网线下切点距离轨道中线距离),(x,y)为接触网线边缘点在图像坐标系下的坐标,pi,qi,ci,di为系统结构参数,采用全站仪辅助二轴线性滑台标定得出。如图2所示,表达了图像坐标点与拉出值、导高值之间的关系。
图中,图像的(x,y)坐标利用图像提取算法得出。图1(a)表明,检测设备的导高基本只与图像的y轴坐标值有关,但是考虑到相机系统的安装不对称性(相机相对于理想安装平面发生横滚、横摆运动)。
图1(b)表明,检测设备的拉出值与图像的(x,y)坐标同时相关,其映射关系可用扭转曲面表示。值得注意的是,该扭转面表明了相机系统的安装不对称性。
2 系统结构参数标定
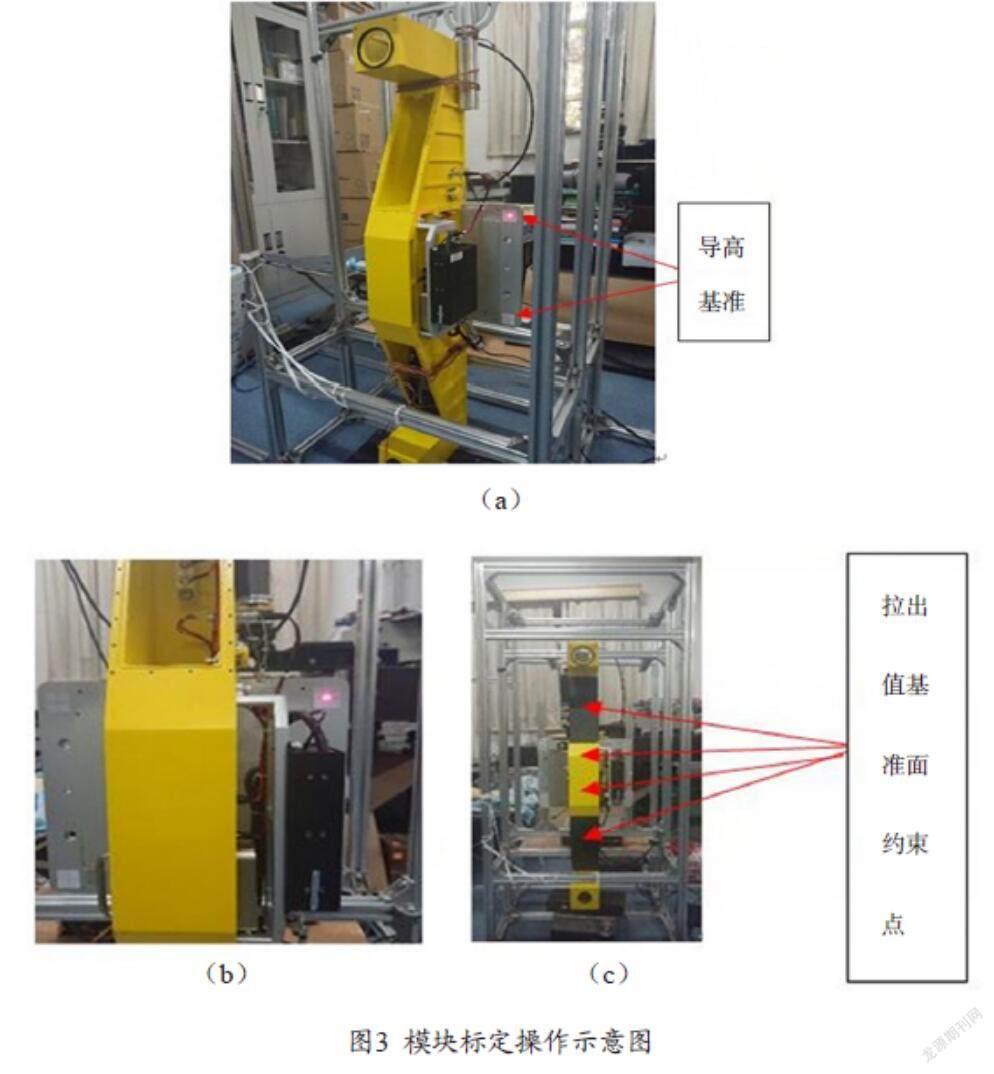
本系统结构参数采用二轴线性滑台进行标定。在设备测量范围内,标志件在滑台上以等间距沿拉出值、导高方向移动,然后利用全站仪测算出滑台的设备坐标系和接触网设备坐标系两者的转换关系,用该关系批量计算标志件的导高与拉出值,实现快速标定。滑台与接触网检测设备的空间位置关系见图3。
3 接触网特征图像提取方法
由于接触网图像特征区域位于相机图像的最下方,因此需要设计以下算法用于寻找接触网线的下边缘位置,采用模板匹配法提取接触网特征。
3.1 连通域匹配
通过模板匹配筛选出接触网线与接触网线安装座所在图片区域ROIa。模板匹配中,由1 000张接触网边缘点所在图像平均而成。
3.2 接触网线区分割
通过对该图像区域进行进一步处理,所示的接触网线区域ROIb。通过分解计算找到接触网最佳边缘点,带入系统数学模型求解出接触网几何参数。
4 试验与分析
为了验证基于视觉的铁路接触网几何参数检测方法,系统在西安地铁1号线延长线和大西高铁(西安北段)线路延长线进行了线路测试,测量距离1KM,采用人力推动检测系统采集地铁接触网图像,采用自由触发捕获图像。图像处理结果与传统的灰度重心法做比较。
对测试现场采集模式下获取得到得图像数据进行处理,得到接触网空间位置特征点坐标。其中,x,y基于模板匹配法求出的下边缘坐标,xc,yc分别重心法求出的下边缘横向、纵向坐标,图中横坐标为测试点号。
用模板匹配法与灰度重心法结果做差,则得到相对变化曲线。为了分析基于模板匹配法计算得到的坐标稳定性,取该段数前5 000个数进行分析。曲线的前半段较为缓和,而后半段波动较大,而该波动是由检测设备的加速运动造成,从统计值看,xdiff的標准差为2.39,ydiff标准差为1.39,满足精度要求,而且高于标准值,因此,基于模板匹配的方法可以获得稳定的导高值。
5 结论
本文针对电气化铁路接触网几何参数检测问题,提出了一种基于视觉的铁路接触网几何参数检测方法,设计了一套测量系统并进行了线路试验。试验结果表明,基于视觉测量的地铁接触网几何参数检测方法能够准确提取地铁接触网几何特征,且图像提取精度及稳定性优于传统的灰度重心法,且精度优于3 mm(标准为5 mm及以上)。
另外相对于传统的定点人工测量方式,本文检测方法具有非接触、实时检测、动态性能好的特点,大幅度地提高了测试精度和工作效率,检测设备集中化程度高,安装方便,适用范围广,具有广阔的应用前景和市场价值。
参考文献
[1] 于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003.
[2] 陈东生,田新宇.中国高速铁路轨道检测技术发展[J].铁道建筑,2008(12):82.86.
[3] 董昭德.接触网[M].北京:中国铁道出版社,2010.
[4] 吴积钦.受电弓与接触网系统[M].成都:西南交通大学出版社,2010.
[5] 邾继贵,于之靖.视觉测量原理与方法[M].北京:机械工业出版社,2012.
[6] 张广军.机器视觉[M].北京:科学出版社,2008.
[7] Rafael C.Gonzalez.数字图像处理[M].北京:电子工业出版社,2017.
