
助老型机械外骨骼的初步设计
2021-01-22 10:33胡志广,吴楠
今日自动化 2021年12期
胡志广,吴楠

[摘 要]目前,随着我国人口老龄化的问题使得人们对帮助老年人的生活起居有着迫切的需求。本文针对未来老龄化的现象提出助老型机械外骨骼的初步设计方案,以帮助正常但行走困难的老年人助力顺畅行走。本文设计的助老型机械外骨骼不同于军事或工业机械外骨骼,它具有质量轻,体积小,价格亲民并且穿戴方便的优点。本文通过探究初步设计机械外骨骼机构、工作方式以及材料,并通过分析已有的典型模型加以创新最终形成助老型机械外骨骼的初步设计方案。
[关键词]机械外骨骼;助老;研究现状;结构设计
[中图分类号]TP242 [文献标志码]A [文章编号]2095–6487(2021)12–00–03
Preliminary Design of the Old-Aid Mechanical Exoskeleton
Hu Zhi-guang,Wu Nan
[Abstract]Nowadays, with the aging of our country's population, people have an urgent need to help the elderly in their daily lives. This article proposes a preliminary design plan for the elderly-assisting mechanical exoskeleton in view of the phenomenon of aging in the future, to help the elderly who are normal but have difficulty walking to help smooth walking. The mechanical exoskeleton designed in this paper is different from military or industrial mechanical exoskeleton. It has the advantages of light weight, small size, affordable price and convenient wear. This paper explores the preliminary design of mechanical exoskeleton mechanisms, working methods and materials, and analyzes existing typical models to innovate and finally forms a preliminary design plan for the old-fashioned mechanical exoskeleton.
[Keywords]Mechanical Exoskeleton; Helping the Elderly; Research Status; Structural Design
根據国家统计局最新在国新办发布会上发布的第七次全国人口普查关键数据,我国人口2021年的老年人数相对于2020年上升了5.44 %,而相对的青少年乃至成年人的人口总数下降了6.79 %。因此,逐年增加的老年群体对养老、医疗、社会服务等方面需求越来越大,老年人体能下降并且容易生病,医疗卫生消费支出压力也越来越大。基于以上问题,如果有一款穿戴设备可以帮助老年人日趋下降的体能,会很大程度地给老年人带来幸福,也会给老年人的家人带来放心。
1 机械外骨骼研究现状
人体机械外骨骼最早研发于20世纪60年代末用于军事领域,用来增加士兵的负荷能力,随着社会的发展逐步进入民用领域、医疗康复领域和工业生产领域。
1.1 国外外骨骼研究现状
目前,美国在外骨骼军事化领域方面较为领先,俄罗斯、法国、德国等国也在进行积极地研发。而在民用领域,美国、日本、以色列、韩国等都具有较强的研发能力,也具有显著的研究成果及实际应用成果。其中较为有代表性的企业有美国EKSO公司、日本Cyberdyne公司、美国SuitX公司、以色列ReWalk Robotics公司、美国Parker Hannifin公司、韩国现代公司等。美国SuitX公司与加州大学伯克利分校的机器人及人体工程学研究室进行合作,并于2016年研发推出轻量级可负重外骨骼系统SuitX Phoenix,主要为脊髓病人服务,可以帮助行走障碍的人独立站立并行走,售价4万美元,电池续航约8 h。SuitX公司随后还推出MAX系统,主要帮助工人承受作业时的重负荷,已有码头、建筑工地、仓库、甚至飞机制造商波音公司成为其客户,其MAX系统的三个模块BackX 、ShoulderX和LegX的售价分别是3 000美元、3 000美元和5 000美元,如图1、图2所示。
1.2 国内外骨骼研究现状
我国对机械外骨骼的研究起步较晚,但在军事与医疗领域的研究也比较突出,国家自然科学基金863计划和科技支撑计划等都已经开始着重关注这方面的研究。例如,浙江大学研究的可穿戴式下肢辅助行走外骨骼机构、基于肌电信号控制的康复医疗下肢外骨骼、悬挂式下肢协助康复外骨骼、踝关节外骨骼原型系统等;哈尔滨工业大学的外骨骼研究针对上肢和下肢的康复训练;海军航空院已研制出有动力驱动的外骨骼助力腿样机;电子科技大学研制的基于电机驱动和液压驱动的助力型外骨骼系统能实现行走、转体、下蹲等动作,并通过多通道智能人机交互技术和分布式实时控制技术大幅提升样机性能的稳定和可靠性;中科院也已研制出一种下肢外骨骼机器人,在单条机械腿上配置了6个自由度(机械髋关节3个,机械膝关节1个,机械踝关节1个,足底1个);清华大学、陆军第二炮兵学院、中科院合肥智能研究所、东南大学、南京理工大学、上海大学、东南大学、中国科学技术大学等科研单位都已经涉入外骨骼技术的研究。
2 机械外骨骼结构初步设计
2.1 设计要求
下肢助行外骨骼机器人需要与穿戴者紧密结合能够随身体运动,并且为下肢各个关节提供助力的一体化设备。
(1)安全性。最基本的要求就是保证穿戴者的安全,因此需要采用具有一定强度的且轻便的材料来保证安全性。
(2)适应性。由于不同人的腰围和腿的长度等参数各有差异,所以设计的外骨骼需要可以根据不同人的身体特征调节自身尺寸,确保在使用的过程中不会出现不匹配的情况;为了增强外骨骼穿戴的舒适程度,还需要外骨骼具备一定仿生性。
(3)合理性。外骨骼作为助力的主要来源不仅需要输出足够大的扭矩,还要具有质量小,节奏紧凑,体积轻便于携带和拆卸的特点。所以选择外骨骼驱动方式是设计关键。
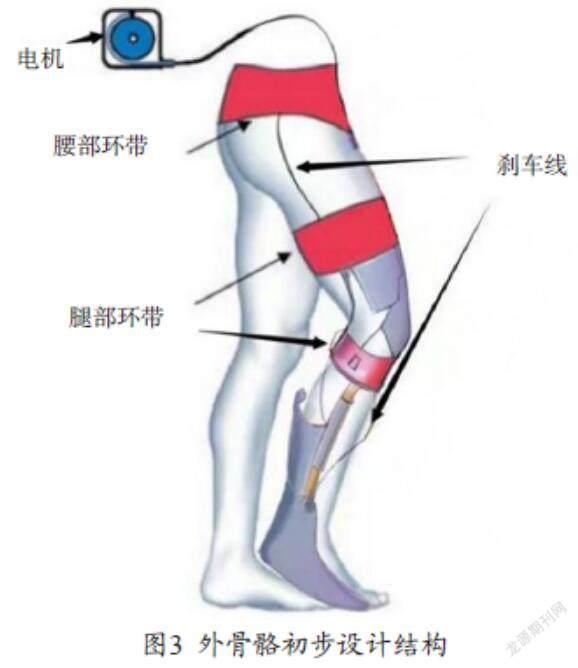
2.2 结构初步设计
采用电机、带轮、刹车线作为主要结构,如图3所示。
2.3 步态分析
以下步态阶段划分过程中右腿脚后跟刚开始接触作为初始时刻进行分析;
第一阶段:触地开端,表示右脚后跟向前挥动至与地面接触的时刻,可以被定义为步态周期的起始阶段。
第二阶段:体重传递,表示右脚脚掌和地面的接触面积慢慢增大,直到右脚脚尖即将离开地面开始摆动的状态过程,此时身体重心逐渐從左侧下肢转移到右侧下肢。
第三阶段:支撑中期,左脚离开地面,开始向前挥动,将从后向前超越右腿位置直至左侧小腿与地面垂直,此时身体重心将从后倾状态转换为前倾状态。
第四阶段:支撑末期,左腿继续挥动,直到脚后跟接触地面,该时期身体躯干随着左腿向前倾斜。
第五阶段:摆腿准备,左腿腿掌逐渐与地面完全接触,直到右腿脚后跟抬起,只剩下脚尖接触地面。
第六阶段:摆腿开端,该阶段右腿开始挥动,从离开地面挥动至左腿靠拢。
第七阶段:摆腿中期,右腿将从靠近左腿位置挥动至右侧小腿与地面垂直。
第八阶段:摆腿末期,右腿将从小腿与地面垂直位置挥动至脚后跟,再次与地面接触,完成一个步态周期。
2.4 工作逻辑
外骨骼整理由电机启动,由电机带动带轮使刹车线做收缩和延伸的动作,大腿和小腿分别用两根刹车线所固定,当迈步时电机通过带轮使大腿端刹车线进行收缩,同时带动小腿刹车线收缩完成抬腿动作,此时另一条腿固定不动,当检测到抬起的脚完全落在地面上时,另一条腿开始运转,如此往复实现行走的运动。
3 机械外骨骼驱动方式分析
目前我国穿戴式外骨骼机器人驱动器结构主要有电机、气压、液压等。气压驱动通过大气直接获得,处理方便,不会对环境造成污染,使用操作也相对安全,便于实现过载保护,但目前气动系统压力不高,所以输出压力不会很大,而且传动效率比较低,排气噪声较大。液压驱动虽然具有较为广泛的应用,能够轻易实现自动化借助各种控制阀特别是液压控制和电气控制结合使用时,能容易地实现复杂的工作循环,而且可以实现遥控,但液压系统中的漏油等因素影响运动的平稳性和正确性,使得液压传动不能保证严格的传动比,而对油温变化比较敏感。温度变化使液体黏性发生变化,使得工作的稳定性受到影响,所以不宜在温度变化很大的地域穿戴,液压驱动要求有独立的能源不能像电源那样方便。电机结构简单,便于拆卸,运动精度高,没有烟尘,无气味,不污染环境,噪声小。耗能低工作效率能达到95 %以上。后期维护方便,虽然大推力的电机驱动成本较高,但用于助老外骨骼机械是绝佳选择,因此电机是应用最为广泛的外骨骼驱动器。
4 驱动电机及刹车线型号选择
在电机的选用采取通过对步进电机和伺服电机进行比较,探究最适合可穿戴外骨骼的驱动装置。步进电机的输出力矩随转速升高而下降,并且会在较高转速时急剧下降,所以其最高工作转速一般在300~600 r/min,而交流伺服电机为恒力矩输出,转速一般为2 000~3 000 r/min,两者都能输出额定转矩,在额定转速以上为恒功率输出。步进电机在低速时易出现低频振动的现象,振动频率与负载和驱动器有关,这种步进电机的工作原理所造成的低频振动现象对机器正常运转很不利。交流伺服电机运转非常平稳,即使在低速时也不会出现振动现象,交流伺服系统具有共振抑制功能,也便于调整。通过探究步进电机和伺服电机的过载能力虽然步进电机没有伺服电机那么有过大的过载能力,不过在人体穿戴的助老机械外骨骼装备不需要那么大的力矩,避免出现力矩浪费的现象。
步进电机停转时具有最大的转矩(当绕组激磁时),而且精度在3 %~5 %,不会将一步的误差积累到下一步。因而有较好的位置精度和运动的重复性,同时步进电机具有优秀的启停和反转相应,将负载直接连接到电机的转轴上也可以极低速的同步旋转,但由于速度正比于脉冲频率,因而有比较宽的转速范围。伺服电机无电刷和换向器,因此工作可靠,对维护和保养要求低。而且定子绕组散热比较方便,惯量小,易于提高系统的快速性也适用于高速大力矩工作状态。不过伺服电机在运作时会出现电刷磨损的粉末,无法在干净的环境下使用,电刷有消耗还需要保养。
由于伺服电机及其驱动器的制造成本和技术含量相对较高,因此价格也比步进电机高了不少,尤其是伺服电机价格差距更大。近年来国产伺服电机发展很快,有了不少品种的伺服电机可供选择,性价比也较高。交流伺服系统在许多性能方面都优于步进电机。但在一些要求不高的工作场景也经常用步进电机来做执行电机。步进电机可能会成为主要的助老型机械外骨骼驱动电机。
刹车线的选用,采取市场普遍的刹车线即可。禧玛诺,佳威的尊爵都是不错的选择。
5 结束语
随着我国老龄化进程的加快和肢体残障人员数量增多,机械外骨骼能够帮助人们提高生活质量这一明显优势显示出巨大的应用前景,相关研究也在不断深入。相信在不久的将来,机械外骨骼在推动人类社会进步、帮助人们节省体力、改善生活品质等方面会起到相当重要的作用。本文对助老型机械外骨骼的机构进行了初步的设计,但是还不够完善,期待后期尽快完善设计并市场化,尽快地给老年人带来方便和幸福。
参考文献
[1] 赵新刚,谈晓伟,张弼. 柔性下肢外骨骼机器人研究进展及关键技术分析[J].机器人, 2020,42(3):365-384.
[2] 欧阳小平,范伯骞,丁硕.助力型下肢外骨骼机器人现状及展望[J].科技导报,2015,33(23):92-99.
猜你喜欢
中华养生保健(2022年10期)2022-05-23
交通科技与管理(2022年8期)2022-05-07
文萃报·周五版(2021年23期)2021-08-06
科学与财富(2021年36期)2021-05-10
南方周末(2019-05-06)2019-05-06
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
神州·上旬刊(2017年9期)2017-10-15
商业会计(2016年15期)2016-10-21
科学与财富(2016年28期)2016-10-14
