
基于麦克纳姆轮的AGV小车
2021-01-20 04:48邓依婷李亚宁
物联网技术 2021年1期
邓依婷,徐 曦,李亚宁,沈 文
(1.湖南工业大学 计算机学院,湖南 株洲 412007;2.智能信息感知及处理技术湖南省重点实验室,湖南 株洲 412007)
0 引 言
近年来,物联网技术飞速发展并渗透到越来越多的行业,而传统的工业物流方式的弊端也日渐显现,越来越多的人致力于把物联网技术运用于工业物流方面[1-3],AGV小车便应运而生。
AGV是Automated Guided Vehicle的缩写,即自动导引运输车[4-5]。AGV小车备有自动导引装置[6],能够沿着规定的布线方式行进,操作者只需根据上位机进行现场实时调度[7]。在工业应用中,AGV小车最常用于在工厂或仓库中运送物料[8]。目前市面常见的AGV小车通常只能实现4个方向的转动,难以适业工业物流领域多变的工作环境。为了应对工业物流中的灵活调度设计了基于麦克纳姆轮的AGV小车。小车采用麦克纳姆轮控制,具有更大的灵活性,系统以多变量协同控制的方式从多角度获取小车信息,能够更加精准、直观、立体地判断小车方位,从而完成自动化物流操作。
1 系统优势
本次设计的基于麦克纳姆轮的AGV小车其车轮采用麦克纳姆轮,系统运用多变量输入协同控制的方式,比以往传统的4轮AGV小车更有优势。
(1)传统AGV小车只具备4个运转方向,但该小车采用全向驱动技术以及麦克纳姆轮控制方式,可以完成8个方向的运行,如直行、斜行、横行、零半径任意角度旋转等。
(2)小车实行多变量输入协同控制,其运行状态由多模块共同控制,可完成地点、时空的三维立体观测,具有获取全局信息的能力。
(4)小车的感知系统由超声波、红外模块、摄像头等构成,依靠模块识别、障碍物识别以及适当的人工智能方法开发全局模型。
2 系统总体设计
系统分为感知层、网络层、处理层和应用层四部分,总体设计如图1所示。
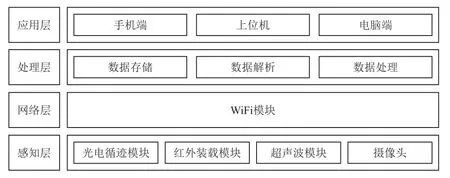
图1 系统总体设计
系统基于感知层实现小车三维立体检测,以STM32F103ZET6为控制核心,搭载WiFi模块实现人机交互,完成小车自动循迹、货物自动装卸等功能。
3 硬件总体设计
小车硬件部分由STM32F103ZET6、超声波传感器、红外传感器、电源模块、WiFi模块、驱动器等组成,主控芯片通过I/O接口和USART与各设备相连。系统硬件总体设计如图2所示。

图2 硬件总体设计
4 软件设计
基于麦克纳姆轮的AGV小车软件设计主要分为以下几部分:
(1)多变量输入控制;
(2)光电循迹和超声波避障设计;
(3)WiFi通信;
医学检验专业实习教育是一项系统工程,全面提高学生综合技能是实习教学的首要任务。然而,长期以来,医学检验专业临床教学以被动教育为主,学生大多被程序化操作所禁锢,忽视对问题的发现和思考,因而在整体能力上存在不足。
(4)闭环系统驱动设计;
(5)全局信息反馈。
4.1 多变量输入控制
多变量输入控制如图3所示,多个传感器协同工作,分别获取小车不同状态信息,核心芯片STM32F103ZET6通过获取的多变量信息完成对小车的行进方向控制以及小车的状态反馈,其主要工作包括如下几方面。
(1)光电循迹模块数据输入控制。通过红外传感器输出的高低电平,检测小车行进路线。
(2)超声波模块数据输入控制。运用超声波测距原理实现小车避障功能,与光电循迹模块协同工作,多方位观察。
(3)红外装载模块数据输入控制。了解货物装卸情况,用于确定下一阶段运行方式。
(4)摄像头数据输入控制。从空间三维立体角度判断小车状态并实时反馈给上位机。

图3 多变量输入控制
4.2 循迹避障算法设计
4.2.1 循迹算法设计
PID控制方法是智能控制技术中一项较为重要的控制方法,已被广泛应用于智能汽车、智能仪表、智能调节器等方面[9-10]。
PID算法模型如下:

式中:KP表示比例系数;KI表示积分系数;KD表示微分系数。
由于小车在行进过程中情况多变、路线多样,采用传统的PID控制难以建立数学模型。因此,在小车的运动和转向过程中采用模糊自适应PID算法(该算法由自适应模糊控制和PID算法结合而成)。模糊PID控制系统采用模糊算法对PID参数进行实时调整以满足实际控制环境对被控对象的要求,具有良好的适应能力[11-12],能够完成系统的实时控制,其结构如图4所示。

图4 模糊自适应PID算法结构
小车采用多输入单输出形式控制运行过程,通过建立的模糊控制规则表和输入的各传感器数据信息,利用模糊控制实现PID运算,最后以PWM脉宽调制的方式控制驱动设备。
4.2.2 避障算法设计
小车通过超声波传感器获取周围障碍物的距离。超声波传感器通过不断发送超声波信号,自动检测有无信号返回,来判断周围障碍物信息。
4.3 闭环系统驱动设计
小车采取多变量输入的方式控制运行,并配备多媒体设备,经过模糊PID算法形成反馈机制,进一步控制小车驱动运行。闭环系统如图5所示。

图5 闭环系统
小车采用闭环控制系统能够更精确、快速地响应指令,在运行过程中不断达到自我调整及自适应智能控制。
5 结 语
本文以麦克纳姆轮全向移动运动学模型为基础,采用模糊PID算法控制设计了一种基于麦克纳姆轮的AGV小车。该小车比传统的4轮AGV小车更加灵活,适应性更强,能够针对不同环境实现自我运行控制,大大提高了物流效率,可以应用于现代工业物流、物资配送等领域。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
阅读(低年级)(2022年6期)2022-06-17
阅读(低年级)(2022年3期)2022-03-30
知识窗(2021年4期)2021-10-02
装备制造技术(2019年12期)2019-12-25
成都信息工程大学学报(2019年6期)2019-08-13
电子测试(2018年15期)2018-09-26
上海公路(2018年1期)2018-06-26
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
