围棋棋子智能分拣机
2021-01-19 06:18河北省唐山市第四十九中学九年级
发明与创新 2021年2期
■河北省唐山市第四十九中学九年级 伦 比
围棋对弈结束后,分拣棋子既耗费大量时间又会打断对局者的思路,影响对弈质量。现在市场上已有围棋分拣机,但分拣效率低、机械体积大、棋子适应度差,使用不便。
针对上述问题,我设计了围棋棋子智能分拣机,它通过履带传送及光感系统,实现对围棋棋子的自动分拣。
一、设计思路
以CUBIC 控制器为主体,通过Scratch Pi 编程连接反射光传感器和直流电机控制器,对落入棋子进行识别和筛选,最后通过履带分拣。整个过程环环相扣,层层递进。
二、工作原理
我设计的初衷是希望本项目可以摆脱棋子的束缚,因此,我着眼于所有围棋棋子共同的特点——颜色黑白分明,这样无论什么样的棋子都适用于本装置。我想到应用反射光传感器,用它对黑、白棋子的反光数值进行读取,然后带动电机,实现自动分拣。
在对棋子进行读取时,因为光线不稳定,所以程序中设置了双重保险,一是在使用前对棋子进行初次检测,设置变量为设定值,二是对对比程序进行改进,将简单的比较大小的程序改进为运算程序,将底部平台的反光值控制在较稳定的范围内后,就可以在检测值和设定值之间预备一定的误差量,使程序更加稳定。
具体程序如图1、图2 所示。
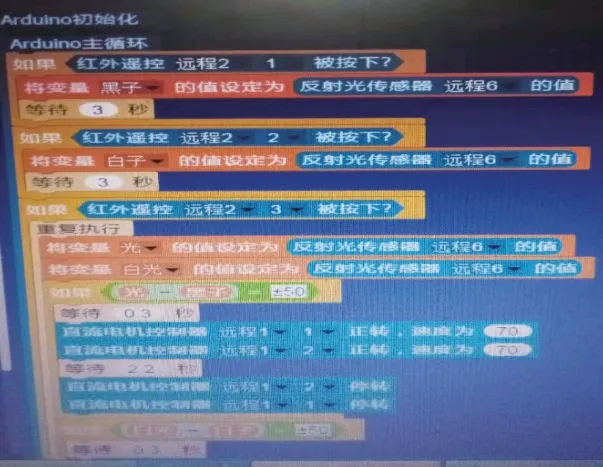
图1

图2
三、搭建模型
搭建模型的传送履带是制作作品的主要难点。在初期,我使用单电机探索,发现有以下几个问题:履带颜色单一,影响棋子识别(黑子);齿轮咬合如果过于紧密会导致电机压力太大,不宜长期使用,如果稍加疏松,棋子检测平台处就不是完美的水平面;两个齿轮在旋转过程中,可能出现互相咬合而无法正常运行的状况等。
思索一番后,我决定三题共解,使用双电机并对履带进行改进。我用方梁将电机固定在履带两端,使其保持绷紧状态而两个齿轮也不会互相咬合。我还设计了“五三角梁、三孔直梁、五孔直梁”配件并将其安装在履带上,使平台部分的履带始终保持水平,保证棋子检测时的稳定性。
通过以上搭建措施,核心的履带传送系统就完成了,通过履带系统延伸出的整个装置也已完成,如图3、图4 所示。

图3 “五三角梁、三孔直梁、五孔直梁”履带配件

图4 双电机系统及方梁固定
四、使用方法
使用时,首先依次将一颗黑子和一颗白子放在检测台上,按下遥控器上的1 和2 按键,对当前环境的棋子反射光值进行读取,然后直接将所有棋子放入棋子通道,按下3 按键即可,分拣结束后按下4 按键,电机即停。
五、创新点
将光感、传送、履带三套系统结合,提高机械效率,通过空间的合理分布使装置体积大幅度缩小。传送履带的适应性极强,可应用于多种围棋棋子,方便棋友对弈。
制作该装置时,我使用激光切割技术切割出亚克力材料作为机械外壳,今后可将其更换为密封性能更好的材料。还可在收纳盒底部添加重力发电装置,将棋子下落碰撞收纳盒产生的能量转化为电能,使其更加节能环保。
猜你喜欢
小学生学习指导(低年级)(2021年5期)2021-07-21
电子制作(2021年3期)2021-06-16
兵器装备工程学报(2021年3期)2021-04-09
电脑爱好者(2020年11期)2020-07-29
小学生学习指导(中年级)(2018年9期)2018-09-07
创新作文(1-2年级)(2017年11期)2018-04-17
小天使·二年级语数英综合(2016年9期)2016-05-14
电脑爱好者(2015年9期)2015-05-15
爆笑show(2015年3期)2015-05-08
坦克装甲车辆(2000年6期)2000-06-13