
GPS/BDS/Galileo三频精密单点定位模型及性能分析
2021-01-18 01:01:36徐天河
测绘学报 2021年1期
周 锋,徐天河
1. 山东科技大学测绘科学与工程学院,山东 青岛 266590; 2. 山东大学空间科学研究院,山东 威海 264209
精密单点定位(precise point positioning,PPP)是指利用外部提供的高精度卫星轨道和钟差产品,在综合考虑各项误差精确改正的基础上,采用合理的参数估计策略(如最小二乘或Kalman滤波等),利用单台GNSS接收机的载波相位和伪距观测值实现全球高精度绝对定位(一般可达分米至毫米级)的一项技术[1]。PPP技术自20世纪90年代被提出并实现后[2-3],经过将近30年的快速发展,基本理论和工程实践已日趋成熟,目前已广泛应用于广域精密定位、低轨卫星定轨、水汽反演与电离层监测、地震与海啸的监测和预警、时间传递等领域[4-7]。
得益于全球分布的大地型GNSS接收机,PPP技术自问世以来,大多采用双频PPP模型,已有学者从模糊度固定角度详细论述了不同双频PPP模型的相互关系[8]。随着美国GPS现代化、我国BDS和欧盟Galileo导航卫星系统的迅速建设,越来越多的导航卫星开始播发三频信号,三频PPP的研究和应用也越来越广泛与深入[9]。基于BDS三频观测值,文献[10—11]系统研究了3种BDS三频PPP观测模型及其定位性能,即基于B1/B2和B1/B3无电离层组合观测值、基于单个无电离层组合观测值及基于非差非组合观测值的三频PPP模型。文献[12]基于GPS三频观测值对比分析了不同三频PPP模型的定位性能。不同研究结果表明,三频PPP与双频PPP在收敛性能和定位精度等性能指标上基本相当。针对城市复杂环境下(如信号遮挡、衰减和多径频繁发生)的智能交通、自动驾驶等对高精度动态定位的需求,文献[13]充分利用三频多系统GNSS数据,提出单历元宽巷模糊度固定PPP方法,并与传统双频PPP和广域伪距增强精密定位方法进行对比分析。结果表明,在干扰因素多的城市复杂环境中,单历元宽巷模糊度固定PPP定位效果更好。可以看出,三频观测值的加入,不仅可以提升PPP模糊度固定效率,还将提升复杂场景下PPP定位的可用性及可靠性。
近年来,已有大量研究针对三频PPP模型与定位性能进行了广泛的验证与分析,但鲜有文献对三频PPP模型间进行系统性的研究与比较,而且对三频PPP模型中GNSS偏差的产生机制及数学表达缺乏深入探讨。从原始非差非组合观测方程出发,在精细考虑伪距和载波相位硬件偏差的基础上,本文详细地研究了3种常用的三频PPP函数模型的独立参数化方法,系统分析了3种PPP模型的相互关系,并给出了非组合模式下两类GNSS偏差(如接收机伪距频间偏差和载波相位频间卫星钟偏差)严格的数学表达形式。本文利用GPS/BDS/Galileo三频PPP算例,分析验证了理论的正确性及不同模型的定位性能。
1 三频PPP观测模型
本节给出三频PPP的观测模型,包括函数模型及其对应的随机模型。为简单起见,利用L1、L2和L3分别表示GPS L1、L2和L5频率,BDS B1、B2和B3频率及Galileo E1、E5a和E5b频率。具体见表1。
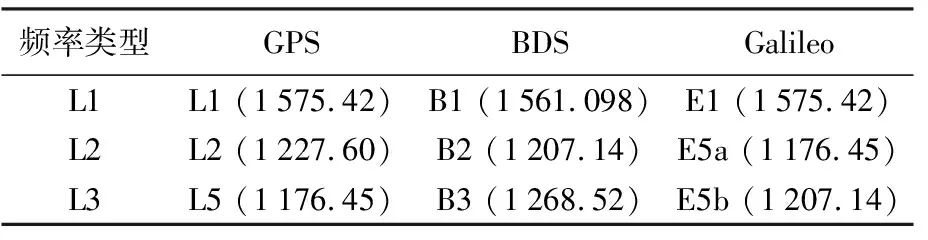
表1 GPS/BDS/Galileo卫星系统及其对应的频率
1.1 函数模型
从非差非组合GNSS原始观测方程出发,建立三频PPP函数模型,并对不同模型的异同点进行了细致研究。
1.1.1 原始观测方程
一般地,非差非组合GNSS伪距和载波相位观测方程可表示如下
(1)

对于伪距和相位硬件偏差,通常认为伪距硬件偏差比较稳定,一天内变化较小[15-16]。而相位硬件偏差具有明显的时变特性,可将相位硬件偏差分解为常数部分和时变部分[17-18],即
(2)

为简便起见,定义以下变量
(3)

目前GNSS精密卫星钟差产品一般是基于L1/L2双频(如GPS L1/L2、BDS B1/B2与Galileo E1/E5a)无电离层组合伪距和载波观测值计算得到[19]。因此,精密卫星钟差包含了双频伪距硬件偏差与相位硬件偏差时变部分的线性组合,即

(4)
引入精密卫星轨道和钟差改正,将式(4)代入式(1)并线性化得
(5)

(6)
顾及式(6),则式(5)可进一步写为
(7)
式中
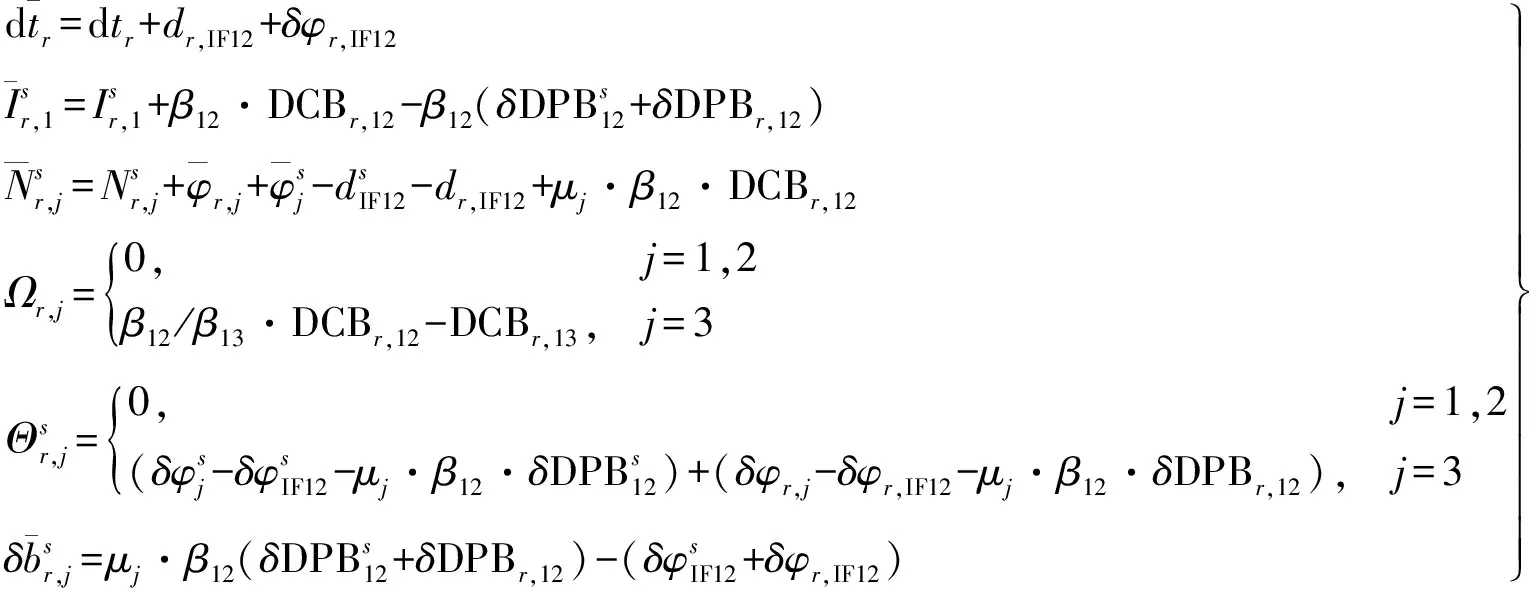
(8)

IFCB估计一般基于经典的无几何距离无电离层(geometry-free and ionospheric-free,GFIF)组合观测量计算得到[17,20]。文献[21—22]论证了IFCB与卫星有关,而与接收机无关,并给出了将GFIF组合观测量估计的IFCB转化为非组合观测值下的IFCB的转换关系,即
(9)

接着,在式(7)的基础上,建立3种常用的三频PPP函数模型。为简便起见,用IF1213-PPP、IF123-PPP和UC123-PPP分别表示基于L1/L2和L1/L3两个无电离层组合观测值、基于单个无电离层组合观测值及基于非差非组合观测值的三频PPP模型。首先给出三频伪距和载波相位OMC观测向量,即
(10)
1.1.2IF1213-PPP模型
IF1213-PPP由两个不同的无电离层组合观测量得到,可表达为
(11)
为使观测方程中接收机钟差参数保持一致,将式(11)展开并改写为
(12)
式中
(13)
式中,Ωr,IF1213为IF1213组合下的接收机IFB。
可以得出,IF1213-PPP的待估参数向量为
(14)

1.1.3IF123-PPP模型
IF123-PPP利用三频观测值直接组成无电离层组合观测量,即
(15)
式中,设计矩阵AIF123=[e1e2e3],e1、e2和e3为线性组合系数,且满足以下关系式
(16)

(17)
将式(15)展开,得
(18)
式中
(19)
相应地,IF123-PPP的待估参数向量为
X=[xdtr,IF123ZrNr,IF123]
(20)

1.1.4UC123-PPP模型
UC123-PPP在不同频率观测值之间不作线性组合,而是直接利用原始伪距和载波观测值,即
(21)
式中,设计矩阵AUC123=diag(1,1,1)。其中,diag(·)表示对角阵。
结合式(7)和式(8),将式(21)进一步展开为
(22)
相应地,UC123-PPP的待估参数向量为
(23)

1.1.5 三频PPP模型间的联系
在观测方程层面,IF1213-PPP、IF123-PPP和UC123-PPP都是基于三频原始观测值的线性组合形成,设计矩阵(或线性组合系数阵)分别对应AIF1213、AIF123和AUC123。不同的是,前两者需对不同频率观测值进行线性组合以消除电离层延迟影响,而UC123-PPP在不同频率观测值之间无须做线性组合。
在待估参数层面,3个模型对应相同的位置参数和对流层湿延迟参数,而估计的载波相位模糊度各不相同;不同于IF123-PPP,IF1213-PPP和UC123-PPP估计相同的接收机钟差参数。此外,IF1213-PPP和UC123-PPP需分别估计一个接收机伪距IFB参数,且两者存在下述转换关系
Ωr,IF1213=β12DCBr,12-β13DCBr,13≡β13·Ωr,3
(24)
1.2 随机模型
假设不同频率观测值之间相互独立,且不同频率伪距或载波相位观测值噪声相同,即满足σP1=σP2=σP3=σP和σL1=σL2=σL3=σL。非组合三频观测值对应的方差-协方差阵ΣUC可以表示为

(25)
式中,σP|L=a/sin(E),其中a为观测值噪声,对于载波观测值,一般经验地取为0.003 m;而对于伪距观测值,一般取0.3 m;E为卫星高度角。
根据误差传播定律,IF1213-PPP、IF123-PPP和UC123-PPP对应的方差-协方差阵为
(26)
式中,ΣIF1213、ΣIF123和ΣUC123分别为IF1213-PPP、IF123-PPP和UC123-PPP模型的观测值方差-协方差阵。
2 试验结果分析
2.1 数据介绍及处理策略
为验证GPS/BDS/Galileo三频PPP定位性能,选取均匀分布的25个MGEX测站于2019年7月的观测数据(采样间隔为30 s)进行数据处理,测站地理分布见图1,测站所处经纬度、配备的接收机类型和天线类型信息见表2。可以看出,所选测站的接收机类型有4种,分别是SEPT POLARX5、JAVAD TRE_3 DELTA、TRIMBLE ALLOY和TRIMBLE NETR9,其中配备TRIMBLE NETR9和SEPT POLARX5接收机的测站占比分别为56%和32%。此外,所选测站均具备跟踪GPS/BDS/Galileo三频信号的能力且满足每个历元跟踪到每个卫星系统的卫星数均大于或等于4颗。表3给出了可以播发三频观测值的GPS、BDS和Galileo卫星情况,其中包括部分GPS卫星(12颗)以及全部的BDS(15颗)和Galileo卫星(24颗)。

图1 选取的25个MGEX测站分布Fig.1 Geographical distribution of the selected 25 MGEX tracking stations

表2 所选MGEX测站基本信息

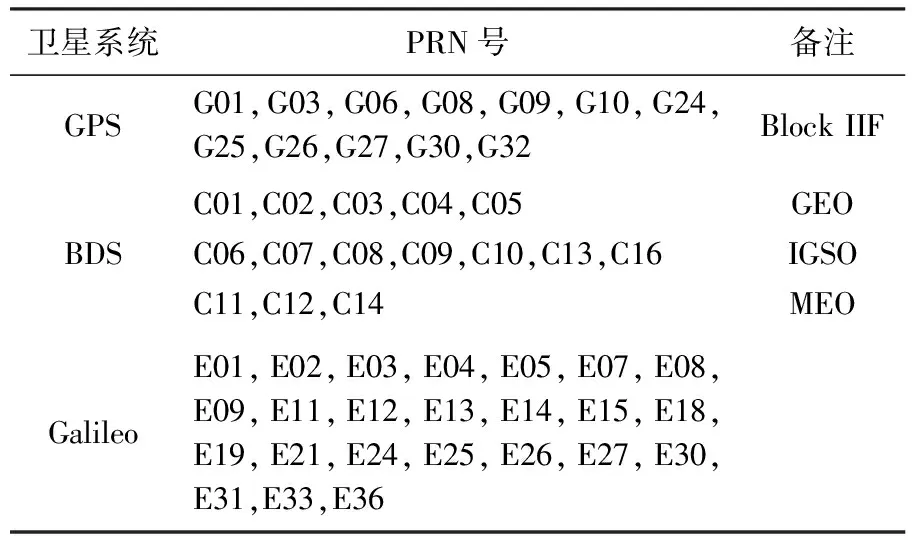
表3 具备三频信号播发能力的GPS/BDS/Galileo卫星情况
当坐标的东(E)、北(N)、垂向(U)3个方向定位偏差均小于1 dm时,认为滤波收敛,选取滤波解稳定后(本文选定滤波开始2 h后)的定位偏差用于统计定位精度[25]。利用箱线图来描述定位精度的分布情况,其中上、下边缘线分别表示95%和5%分位数,矩形盒的上、下两端线分别表示75%和25%分位数,矩形盒内部线表示中位数,即50%分位数[26]。
2.2 静态PPP
算例给出5种GPS/BDS/Galileo静态PPP模型定位情况,选取了双频无电离层组合模型IF12-PPP与双频非组合模型UC12-PPP作为对比。图2为测站KAT1和KIRI在年积日(day of year,DOY)182的静态定位误差曲线图。可以看出,在收敛阶段IF123-PPP表现相对其他模型稍差一些,这主要是由于具有三频观测值的GPS卫星较少(仅有12颗),而IF123-PPP模型对三频观测值完整性的要求更为苛刻,导致其参与数据解算的GPS观测值数量相比其他模型下降明显。以KAT1测站为例,IF123-PPP、IF1213-PPP和UC123-PPP解算用到的GPS平均卫星数分别为4.2、10.4和10.4。待滤波解充分收敛后,5种PPP模型定位误差曲线基本重合。
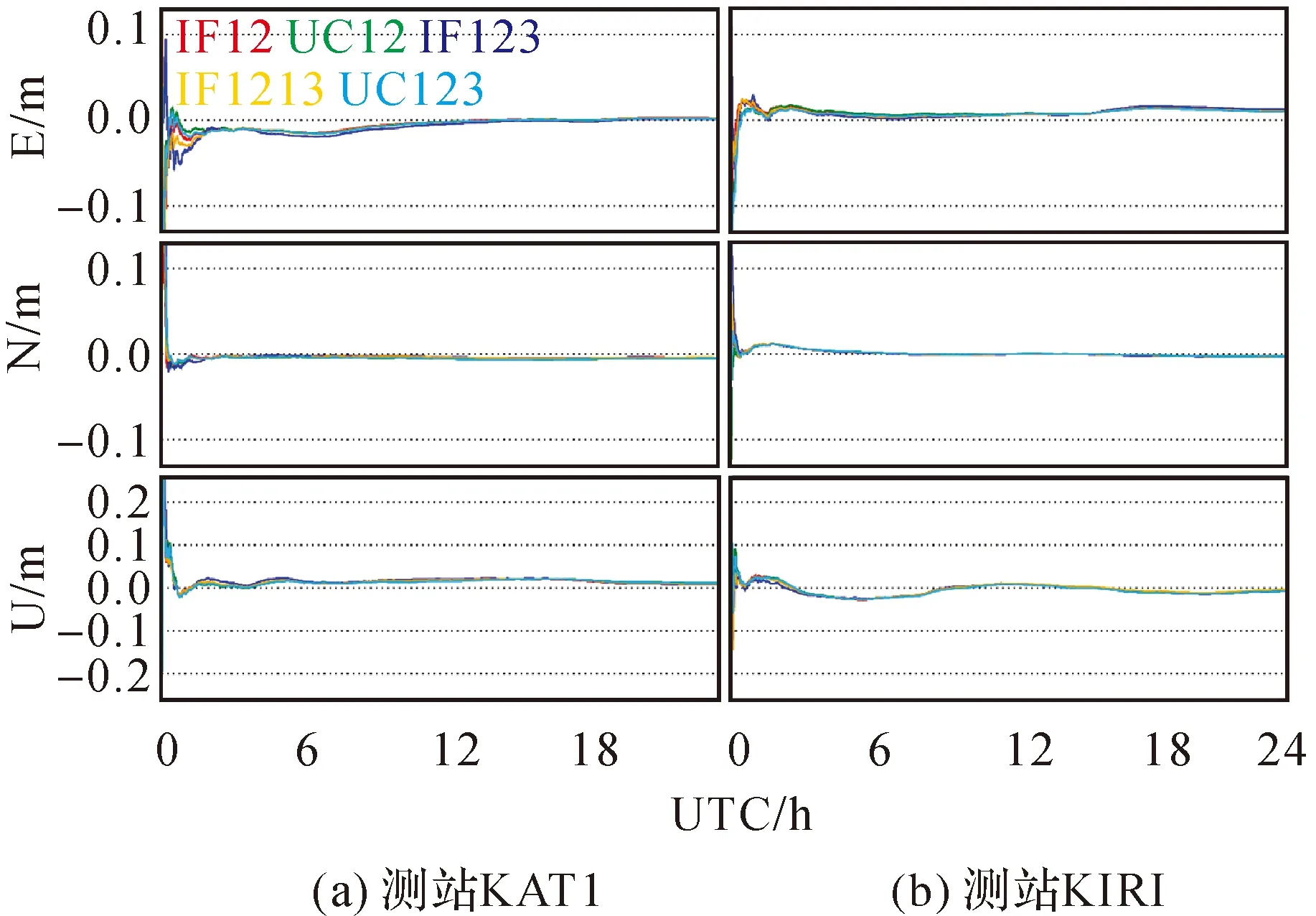
图2 5种模型GPS/BDS/Galileo静态PPP定位误差(年积日182,2019)Fig.2 Positioning errors derived from five GPS/BDS/Galileo static PPP solutions on DOY 182, 2019
图3给出了所选25个测站一个月不同PPP模型静态定位模式下定位精度分布箱线图,表4列出了其定位精度的中位数统计。从图中可以看出,相比双频PPP,三频观测值的加入对GPS/BDS/Galileo PPP定位精度提升不明显,三频PPP定位性能与双频PPP基本相当。从表4可得,5种静态PPP模型收敛后的水平方向精度优于1.0 cm,高程方向优于1.5 cm。
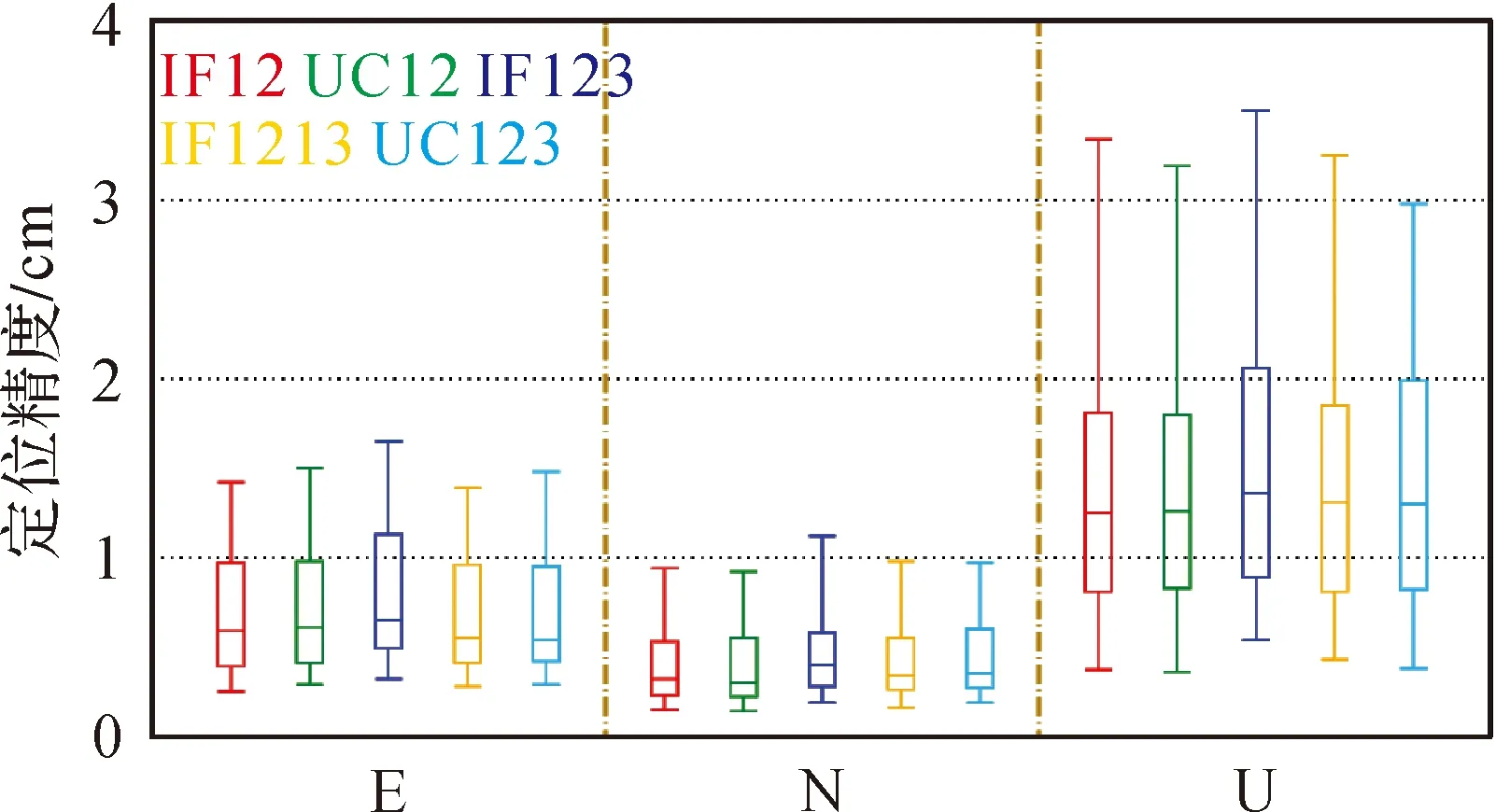
图3 5种模型GPS/BDS/Galileo静态PPP定位精度分布Fig.3 Distribution of positioning accuracy among five GPS/BDS/Galileo PPP models in static mode
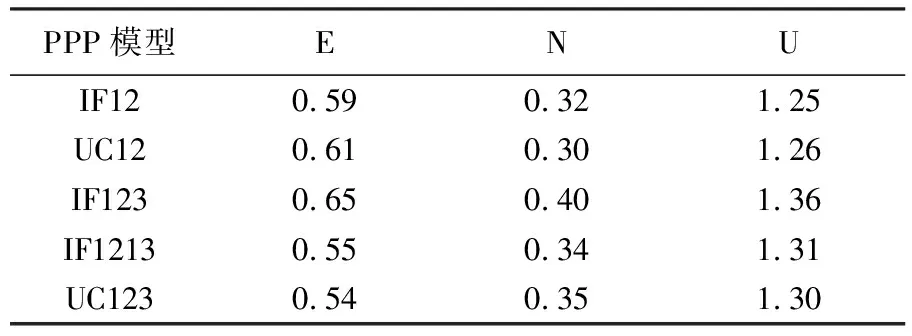
表4 5种模型GPS/BDS/Galileo静态PPP静态定位精度统计
由式(24)可以得出,IF1213-PPP和UC123-PPP估计的接收机IFB的转换系数为β13,对应GPS为-1.261、BDS为-1.944、Galileo为-1.422。图4给出了DOY 182不同测站IF1213-PPP和UC123-PPP估计的接收机IFB间转换系数。从估计的IFB得到的转换系数与参考值的吻合程度来看,Galileo最好,BDS次之,而GPS最差,这是因为GPS三频观测值卫星为MEO卫星,每个测站实际观测到的三频GPS卫星相对BDS和Galileo要少。仍以DOY 182 KAT1测站为例,可观测到的具有三频观测值的GPS、BDS和Galileo平均卫星数分别为4.2、10.7和7.3,其中BDS大部分为GEO和IGSO卫星。此外,接收机IFB与伪距观测值有关,相比GPS和BDS,Galileo的伪距观测值质量更好[27]。
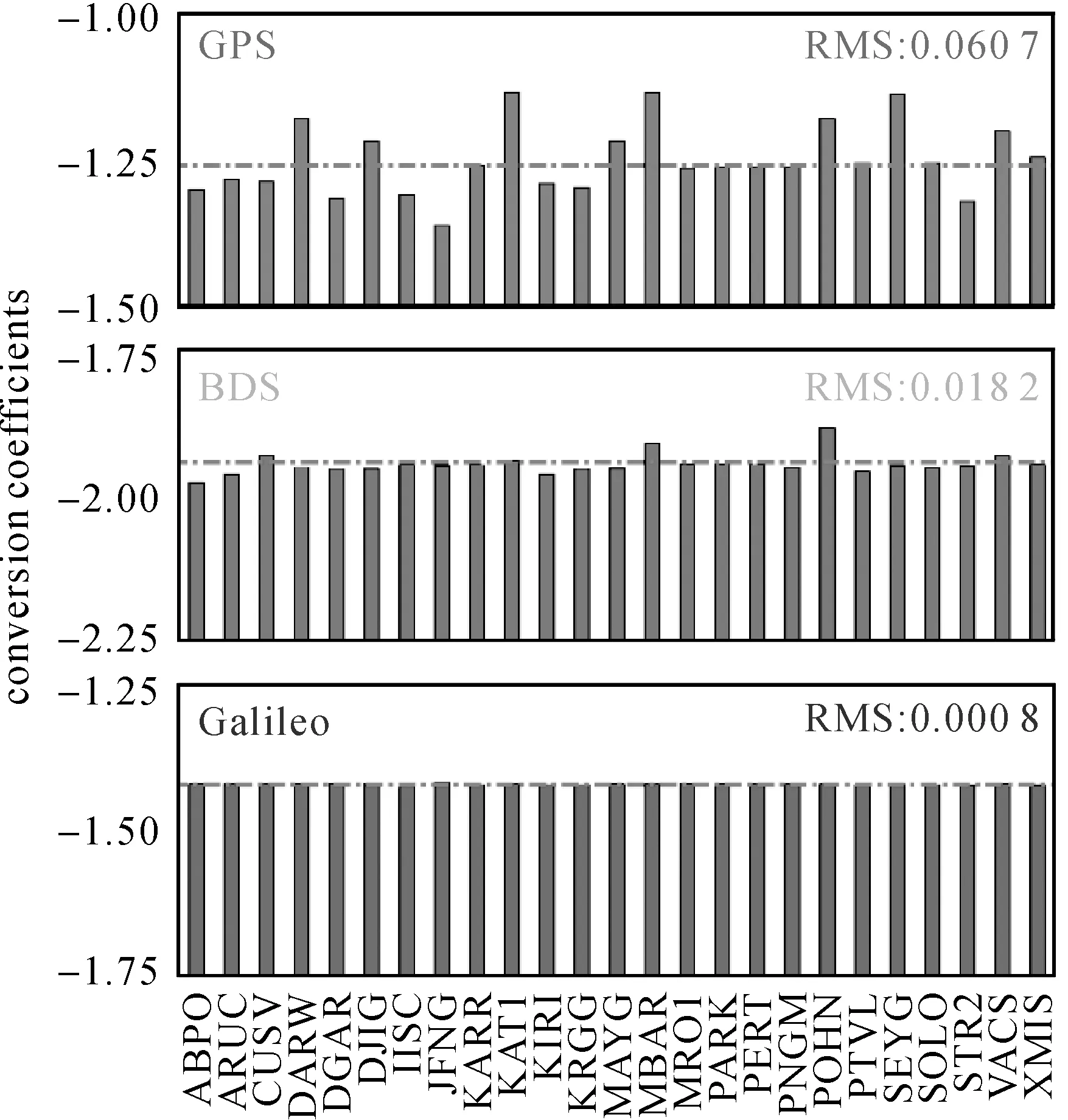
图4 不同测站IF1213-PPP和UC123-PPP估计的接收机IFB间转换系数(DOY 182,2019)Fig.4 Conversion coefficients of receiver IFBs derived from IF1213-PPP and UC123-PPP for different stations (DOY 182,2019)
2.3 动态PPP
算例给出5种GPS/BDS/Galileo动态PPP模型定位情况。图5为测站KAT1和KIRI在DOY 182的动态定位误差曲线图。与静态PPP相比,IF123-PPP动态定位误差与其他PPP模型差异较明显,可见动态PPP对可观测卫星数的变化更敏感。因此,对于三频PPP定位,若有GPS观测值加入时,不建议采用IF123-PPP模型。整体来看,除了IF123-PPP,其他4种PPP模型定位误差吻合较好。从图6和表5可以看出,三频IF1213-PPP、UC123-PPP与双频IF12-PPP、UC12-PPP的定位精度基本相当,而IF123-PPP定位精度稍差,整体上,5种动态PPP模型收敛后的水平精度优于2.0 cm,高程精度优于5.0 cm。
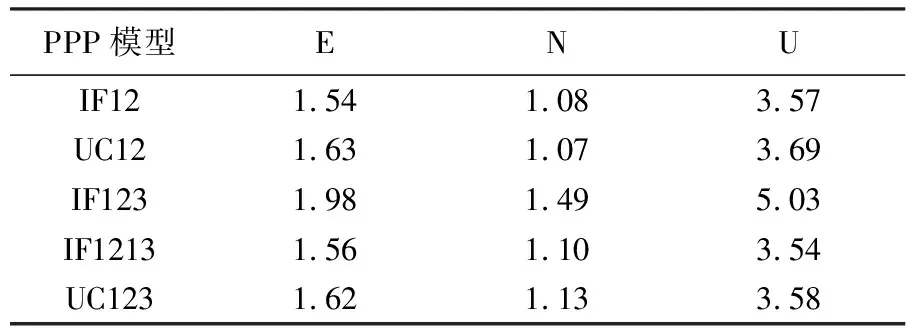
表5 不同GPS/BDS/Galileo PPP模型动态定位精度
此外,为了测试不同PPP模型的解算效率,图7表示DOY 182不同测站不同PPP模型的解算时间(计算机为八核Intel Core i7-8550U处理器,CPU主频1.8 GHz)。很明显,基于非组合观测值的PPP模型具有更多的观测值与待估参数,因此其计算时间明显大于无电离层组合PPP模型。
3 结 论
本文对三频PPP模型中出现的偏差项(如接收机IFB、载波相位IFCB等)进行了较为详细的分析和描述。在充分考虑伪距和载波相位硬件延迟的基础上,从公式推导的角度,详细讨论了3种三频PPP模型的独立参数化方法,并从观测方程和参数估计角度,论述了不同三频PPP模型的相互关系。试验分析了3种PPP模型的静态、动态定位精度,得出以下结论。
(1) 由于当前GPS卫星仅有12颗可播发三频信号,因此有GPS观测值参与的三频PPP解算,不建议采用IF123-PPP模型。

图5 5种模型GPS/BDS/Galileo动态PPP定位误差(年积日182,2019)Fig.5 Positioning errors derived from five GPS/BDS/Galileo kinematic PPP solutions on DOY 182, 2019

图6 5种模型GPS/BDS/Galileo动态PPP定位精度分布图Fig.6 Distribution of positioning accuracy among five GPS/BDS/Galileo PPP models in kinematic mode
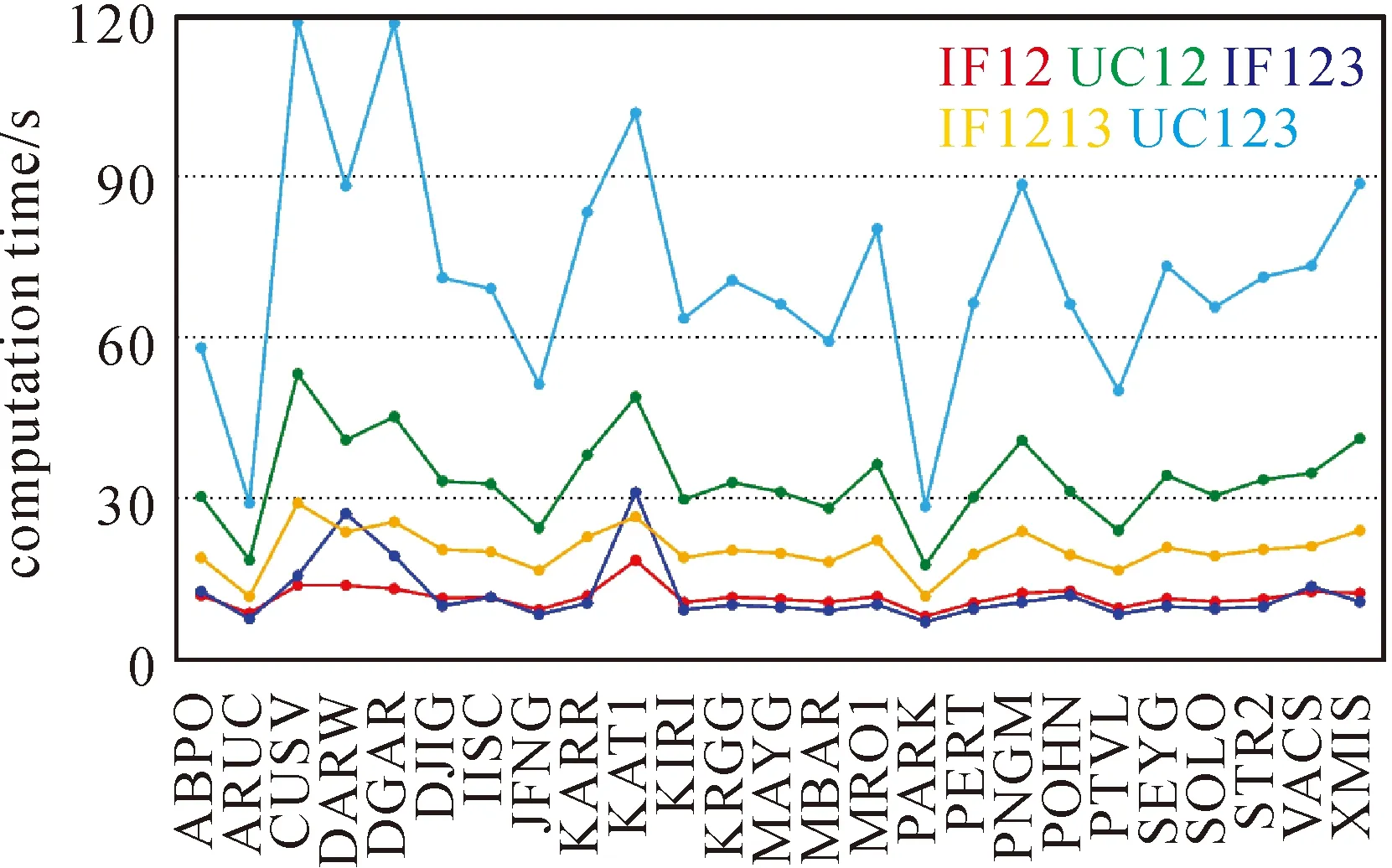
图7 不同PPP模型数据解算耗时对比(DOY 182,2019)Fig.7 Computation time for different PPP processing (DOY 182,2019)
(2) 不考虑IF123-PPP模型,待滤波收敛后,双频、三频非组合PPP与相应的无电离层组合PPP定位精度基本相当。相比双频PPP,三频观测值的加入对PPP定位性能的提升不明显,三频PPP与双频PPP的定位精度基本相当。
(3) GPS/BDS/Galileo三频PPP,在静态定位模式下,收敛后水平方向精度优于1.0 cm,高程方向优于1.5 cm;而在动态定位模式下,收敛后水平精度优于2.0 cm,高程方向优于5.0 cm。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
测绘科学与工程(2017年3期)2017-08-16 02:46:08
雷达学报(2017年6期)2017-03-26 07:53:02
测绘通报(2016年12期)2017-01-06 03:37:13
导航定位学报(2015年2期)2015-06-05 09:27:38
导航定位学报(2015年2期)2015-06-05 09:27:34
