
基于计算机视觉技术的无土栽培蔬菜种植系统的研究与设计
2021-01-15 05:50祝朝坤谷会斌
电子产品世界 2021年12期
祝朝坤 谷会斌



摘要:本设计是一种基于计算机视觉的无土栽培蔬菜种植架,以STM32作为核心控制,运用计算机视觉技术对植物生长状态进行识别判断,根据植物生长阶段提供植物所需的营养液浓度和光照。传统的无土栽培需要过多的人为操作,比如培养液浓度配比,在植物生长的不同阶段越要不同的溶液浓度,还有光照强度、环境温度等因素,需要耗费大量人力调节这些参数。本研究将这些参数调节交给无土栽培种植架来完成,自动调节植物生长周期所需的环境参数和培养液浓度。
关键词:计算机视觉;无土栽培;物联网;STM32;OpenCV
1绪论
1.1研究背景
近10年来,计算机视觉技术获得了里程碑式的进步,由于识别错误率的大幅降低,计算机视觉技术被愈来愈广泛应用在人们日常生活中的各个领域[1]。而由于传统的农作物种植受限于耕地面积、天气、虫害等多种因素,无土栽培也逐渐成为目前的研究热点,此外,目前成熟的无土栽培还拥有许多传统种植不可复制的优越性,如面积小、收获多、成熟快、品质优良等。本课题的设计初衷就是更方便快捷地为人们和社会提供符合食品安全的健康绿色蔬菜。
1.2研究意义
本课题的无土栽培蔬菜种植架结合计算机视觉技术进行统筹设计,具有一定的创新和实用性,体现在:1在实现无土栽培自动化管理的过程中,计算机视觉技术可以通过云端进行远程监测,观察作物的生长状态以及生长环境参数,无需过多人为干涉,从而解放了劳动力,使用户享受到科技为现代生活带来的美好。2该无土栽培蔬菜种植架的开发能够自动管理无土栽培过程中蔬菜生长所必需的变量,始终将数值控制在合理范围内,令蔬菜无季节性限制、天气影响、虫害影响,同时也提高了作物的安全系数,为蔬菜安全生产提供技术支持。
1.3主要研究内容
基于计算机视觉技术的无土栽培蔬菜种植架的设计以STM32F103系列单片机为中心,使用计算机视觉技术对植物的生长状况进行识别和处理,再将得到的植物生长数据发送给单片机,由单片机连接WiFi把数据包上传至云服务器,管理人员从手机APP或数据可视化网页中远程监测、控制。达到智能化无土栽培农作物的目的。
2硬件设计
2.1系统结构设计
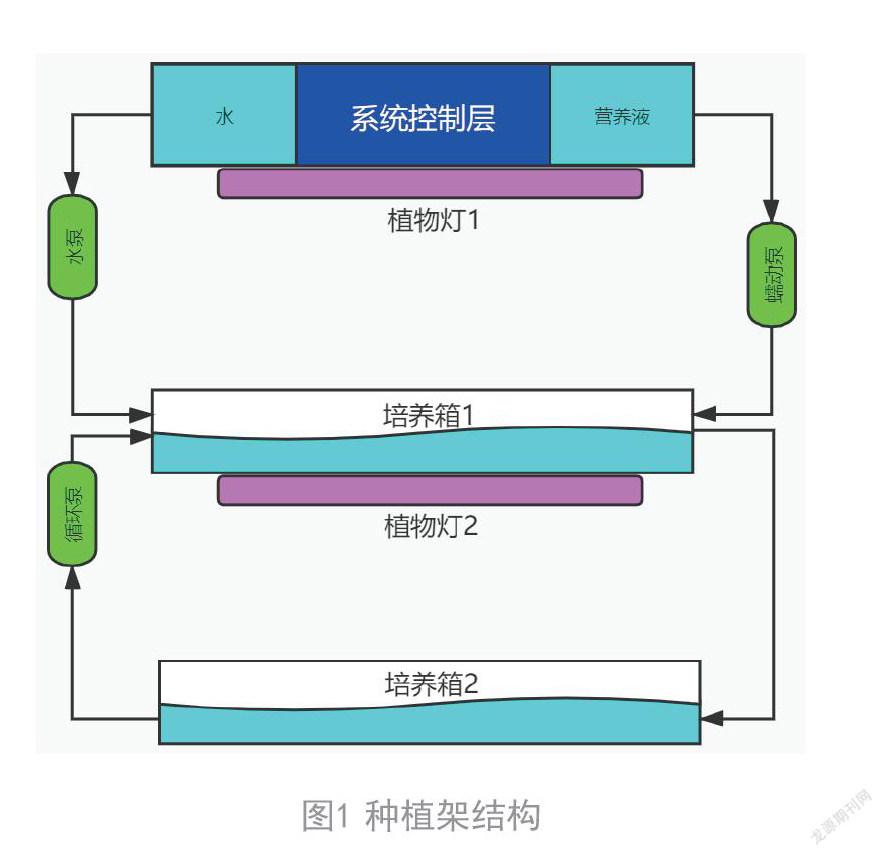
蔬菜种植架采用类似楼层一样的3层结构,第1层即顶层控制层主要放置电路板和营养液,第2层和第3层是培养箱。种植架结构如图1所示。2.2系统电路设计
2.2.1系统电源电路说明
系统电源采用220V转12V/5A开关电源,功率为60W。因为单片机电源需要12V和5V电源输入,所以加了1个5V稳压模块,为单片机提供5V电源输入。
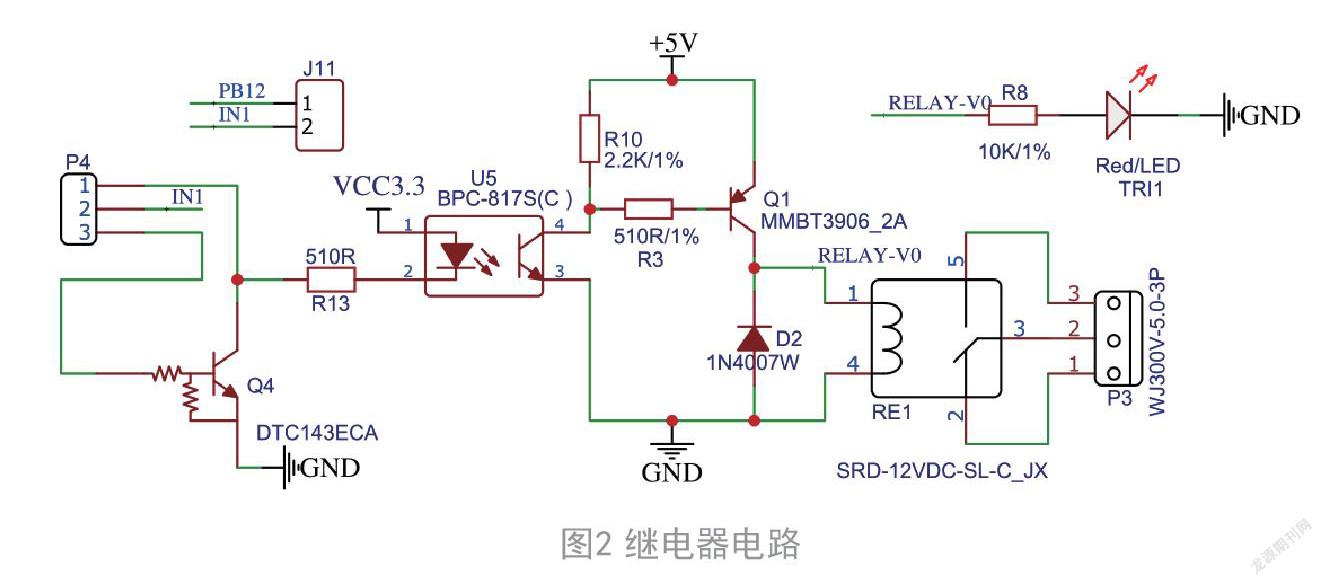
2.2.2继电器电路设计
该电路采用有光耦隔离的继电器电路,其相对直接用三极管控制的电路有很大优势,可以让5V继电器电路与3.3V单片机电路隔离。继电器是感性器件,在断电时会产生很高的反电压,这个反电压会反作用到单片机端口,导致单片机无法正常工作,甚至会损坏单片机端口。为了保护单片机,通常在继电器的线圈处加1个续流二极管,在单片机端口处加光耦隔离。继电器电路如图2所示。
2.2.3pH检测传感器说明
pH传感器模块有1个BNC接头,通过它与pH复合电极连接,模块的DS18B20温度传感器接口方便进行软件温度补偿。通过调节电位器上的旋钮可以调节放大倍数。单片机通过ADC采集pH值原始数据,再通过公式计算最终获得pH值。
2.2.4培养液浓度检测模块说明
培养液浓度检测模块主要用于检测水中的含盐量。营养液中的物质基本是无机盐,也正是植物生长所需要的物质,通过培养液浓度检测模块测量出TDS值,就可以知道溶液的浓度值。该模块通过串口协议把含有溶液浓度值的数据传给单片机,单片机通过简单处理解析提取出溶液浓度值。
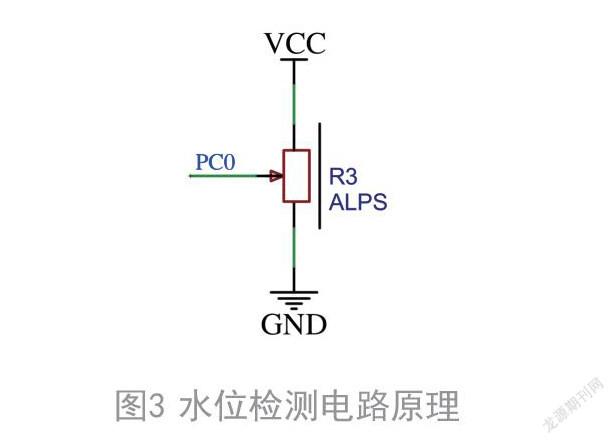
2.2.5水位检测电路设计
水位检测在设计中用于观察培养箱中水位是否充足,便于系统及时补充水,同时保持水循环系统的稳定运行。该电路利用水的浮力,根据水位的变化可以输出相应趋势的AD值,从而得到水培箱中的液位。水位检测电路原理如图3所示。
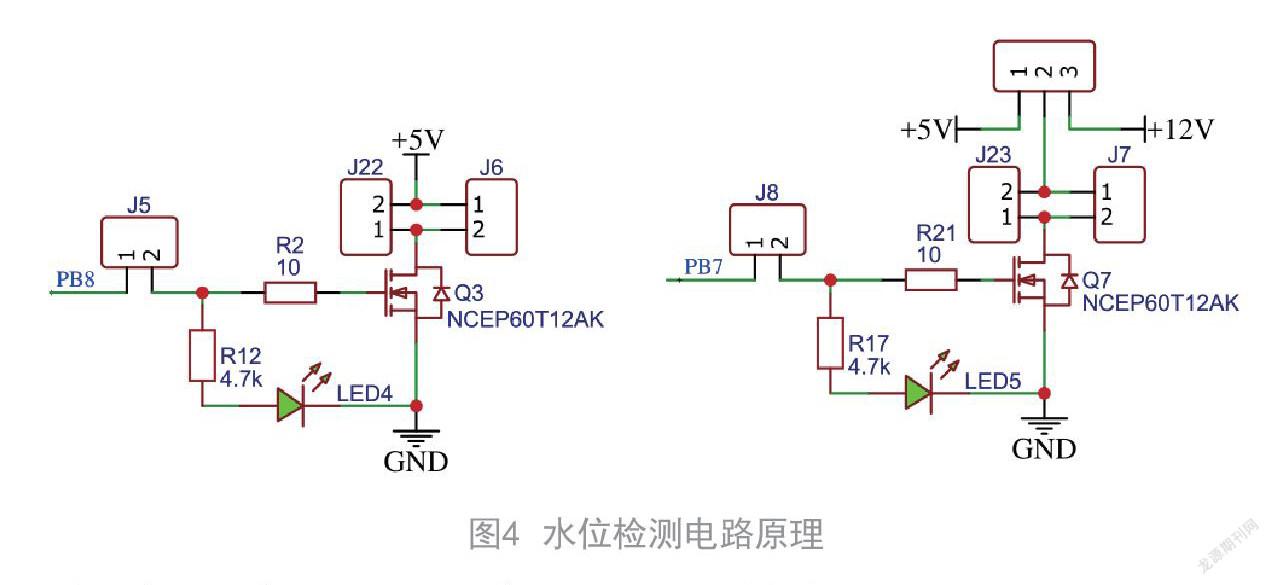
2.2.6水泵控制电路设计
水泵控制电路采用MOS管开关电路,MOS管是NCEP60T12AK,栅源极阈值电压为2.4V,可以通过单片机的I/O引脚输出高低电平进行直接控制。该电路具有结构简单、效率高和便于控制等特点。水位检测电路原理如图4所示。
2.2.7ESP8266WiFi模块说明
本设计使用的联网模块是ESP8266,该模块采用32位低功耗芯片,主频高达160MHz,支持AT指令,同时也支持二次开发。本设计主要通过串口发送AT指令与ESP8266模块进行通信,控制ESP8266模块联网和发送数据。
3系统软件设计
该系统的软件设计主要分为两部分,一是单片机开发语言,二是使用计算机视觉库OpenCV的计算机视觉程序设计。
3.1计算机视觉程序设计
本设计采用的视觉识别技术是OpenCV的图像膨胀、腐蚀、高斯滤波和边缘检测等技术。首先把摄像头打开获取实时图像,而后对图像进行膨胀、腐蚀处理,使图像内物体的轮廓更加突出,再使用高斯滤波算法去除圖像上物体内的杂质,最后用选定好范围的边缘检测技术计算出物体的大小。图像识别流程如图5所示。
3.2单片机程序设计
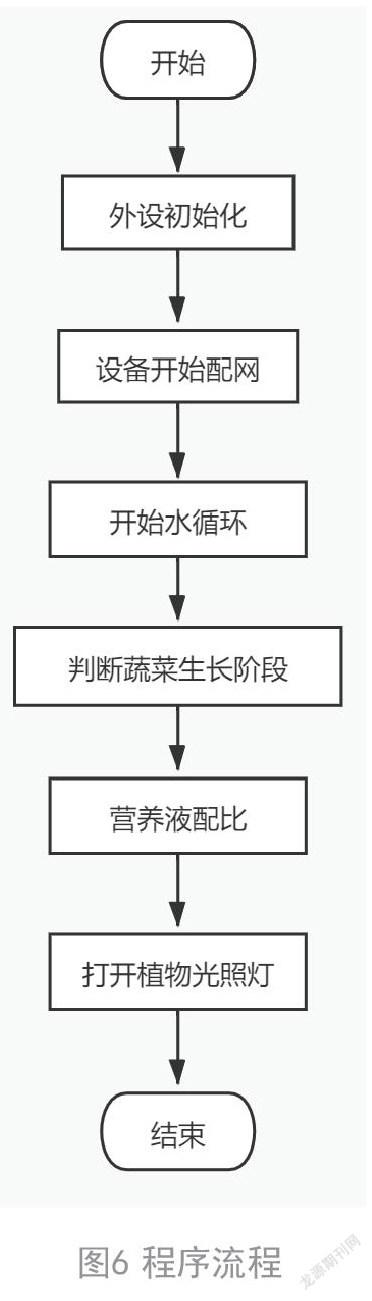
本设计的系统流程如图6所示,MCU端首先对各个外设模块进行初始化,PC端视觉识别系统同步进行初始化,而后设备开始配网连接云服务器,最后设备启动,溶液浓度自动配比,水循环系统启动,正常提供光照,可以通过云端查看参数以及远程控制。
3.2.1培养液配比子程序设计
培养液浓度配比时,首先根据视觉识别到的植物生长阶段确定植物生长所需要的培养液浓度,通过蠕动泵补充营养液,再通过溶液浓度检测装置检测溶液浓度是否达标,从而实现培养液浓度的配比。营养液配比程序流程如图7所示。
3.2.2种植架水循环子程序设计
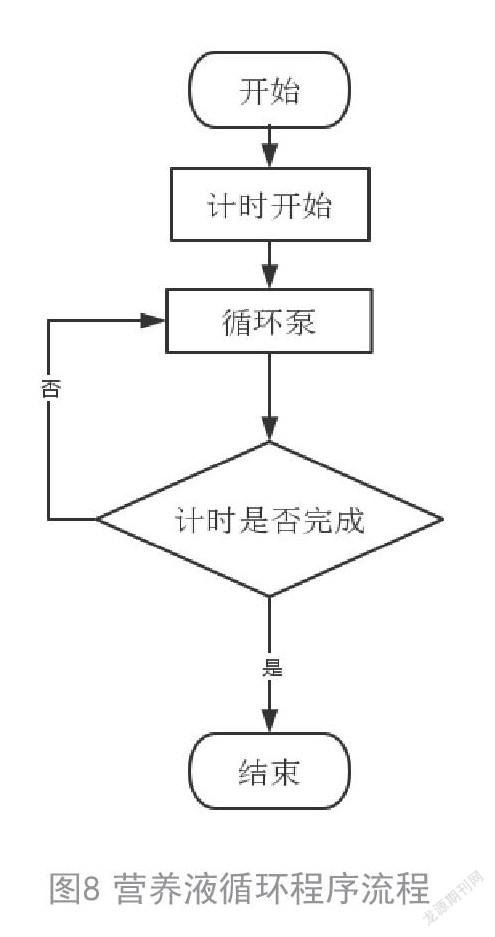
在蔬菜进入生长期时,进行培养液周期性水循环,例如1h循环10min。通过程序设计使其功能完美实现,这个过程需要用定时器定时控制水泵的工作时间,使其周而复始地工作。水循环的目的是维持蔬菜根系生长过程所需的氧气。营养液循环程序流程如图8所示。
3.2.3光照子程序设计
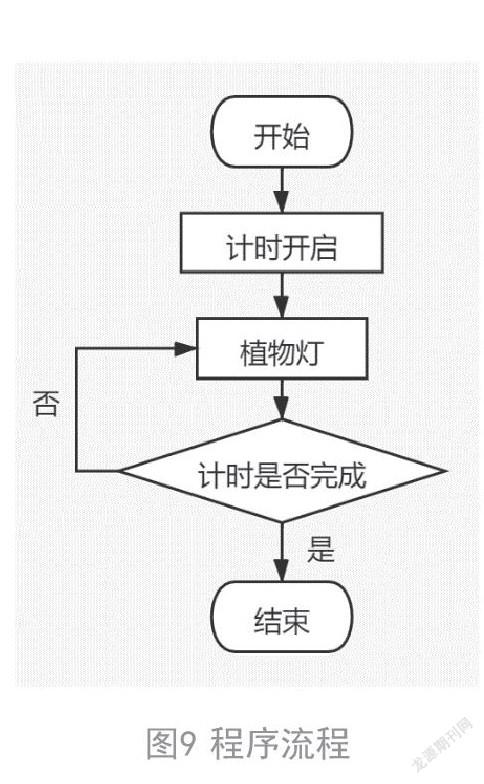
在不同生长阶段,蔬菜每天需要的光照时间不同,通过视觉识别得到蔬菜的生长阶段,而后通过定时器实现对光照时间的控制,使蔬菜获得光照的时间刚刚好,为蔬菜的光合作用提供能量,讓蔬菜高效生长。程序流程如图9所示。
3.2.4物联网程序设计
本设计采用的设备联网方式是WiFi连接,设备连接WiFi后会通过MQTT协议自动接入中国移动OneNET平台,接入OneNET平台后可以通过手机远程控制和观
3.4人机交互界面设计
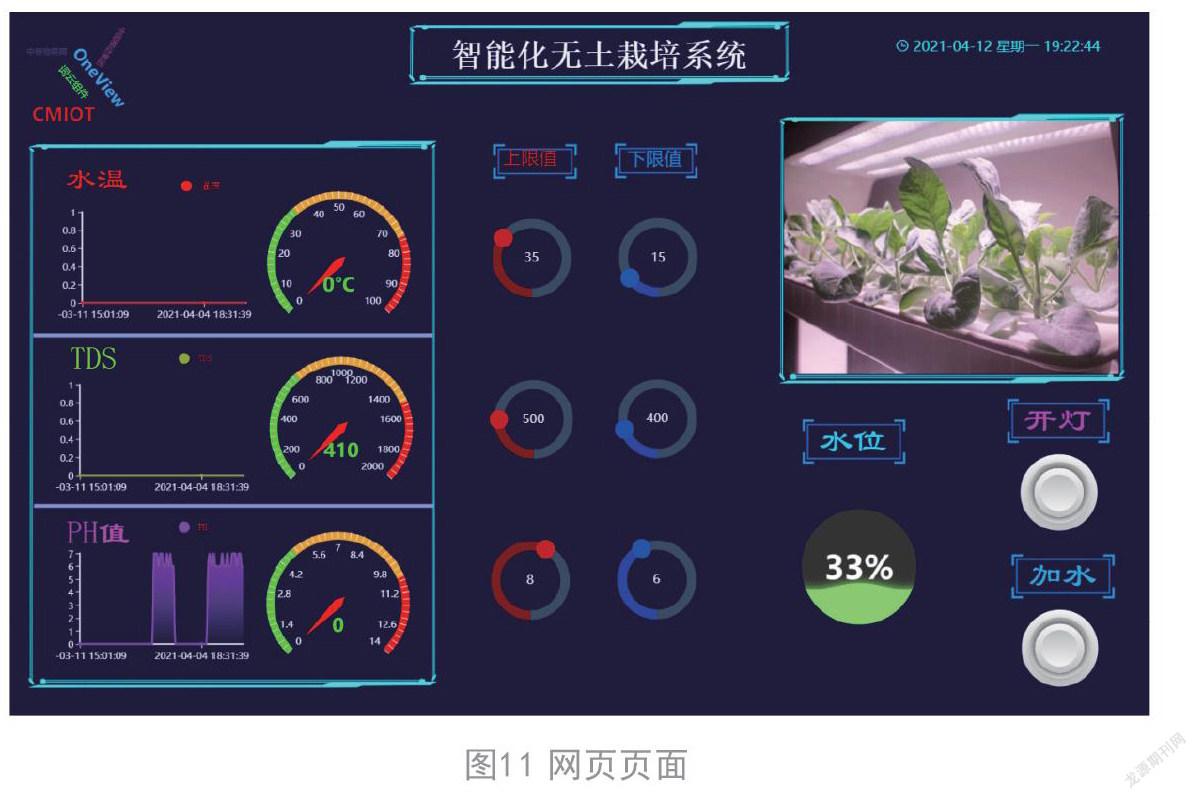
为了更好地实现对种植架的观察和管理,本设计采用多种人机交互方式,如手机APP和电脑网页两种交互方式,可以很方便地用手机和电脑进行远程控制和观察。
本系统的采用中国移动OneNET平台提供的数据可视化组件进行网页页面设计和手机APP页面设计。网页页面如图11所示。
4结束语
本设计将无土栽培蔬菜种植架与计算机视觉技术有机结合,是一个较为新颖的尝试。在后续研究过程中还将在以下方面进一步优化。1在通过计算机视觉技术来检测植物生长情况方面,后续需要做的是提升监测精度,减少误差;2无土栽培的另一个重点在于植物是否能健康生长,植物营养液与水的配比尤为重要,植物在不同生长阶段所需的营养液浓度可能存在细微差别,在后续的研究中,要做到严格控制营养液在不同时期的配比;3在远程云端控制和云端监测方面,后续初步设想是定期对设计进行功能升级,具体升级功能要在第一批用户使用后进行,收集用户反馈和数据并针反馈提出有效准确的解决方案;4提升本系统的容错率。
对于普遍的土壤种植方式而言,无土栽培蔬菜种植架的研究与设计具有许多优势,首先能够在一定程度上解决我国部分地区可用耕地资源不足的问题,也为智能化进行农作物的种植管理提出了一种新的解决方案。
参考文献:
[1]侯铜.基于计算机视觉的植物自动识别方法研究[D].北京:北京林业大学,2015.
[2]曾非一.嵌入式软件开发技术研究—MPC860目标机底层软件的实现[D].成都:电子科技大学,2014.
[3]孙宝元,杨宝清.传感器及其应用手册[M].北京:机械工业出版社,2005.
[4]郑人杰.计算机软件测试技术[M].北京:清华大学出版社,1992.
[5]任强.传感器选用原则.铁道技术监督,2004(9):33-34.
猜你喜欢
无线互联科技(2016年13期)2017-01-10
现代电子技术(2016年22期)2016-12-26
农家科技下旬刊(2016年9期)2016-12-15
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年21期)2016-10-18
环球时报(2016-08-01)2016-08-01
安徽农学通报(2015年10期)2015-06-15
