智能网联汽车自动紧急制动系统行人避撞联合仿真
2021-01-12 08:26:08吕翱
廊坊师范学院学报(自然科学版) 2020年4期
吕 翱
(福建船政交通职业学院,福建 福州 350007)
智能网联汽车是传统汽车与无线网络通信模块的集成体,在新一代移动通信技术快速发展的大背景下,与云端计算机相连接的传统汽车开始朝向智能化的方向发展[1]。若采用合适的数据处理方法,与云端计算机相连接的智能网联汽车就能够实现实时行人避障,车辆行驶的安全性也会得到显著的提升,为司机和行人的安全提供更加充分的保障[2]。
1 自动紧急制动系统的算法应用机制
本研究以车辆与行人的碰撞时间为核心指标对车辆行驶的安全状况进行判定,车辆针对行人的碰撞时间指的是司机为避免与行人发生碰撞所需要的制动时间,该指标的计算方法如下[3]:
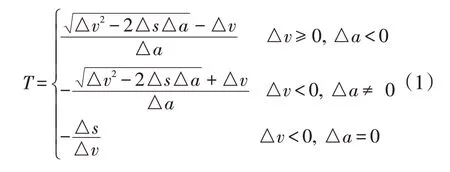
公式(1)将车辆针对行人的碰撞时间记为T;将车辆与行人之间的相对加速度记为△a,单位为m/s2;将车辆与行人之间的纵向相对速度记为△v,单位为m/s。各种车速下不同安全等级所对应的T的取值范围如表1 所示。车辆在行驶过程中,若T值不符合当前车速下的安全等级要求,紧急制动系统就会自发出报警[4]。

表1 各种车速下不同安全等级所对应的T的取值范围
2 自动紧急制动系统的基本构成
自动紧急制动系统主要由算法控制子系统和PID 控制子系统两部分构成,算法控制子系统负责向PID 控制子系统发送期望减速度数字信号,为自动紧急制动提供数据驱动[6];其中PID 控制子系统负责将期望减速度值转化为制动管路压力,进而针对车辆实施制动管理[5]。
2.1 算法控制子系统
如公式(1)所示,本次研究所设计的自动紧急制动系统算法具体包括纵向相对距离△s(m)和相对速度△v(km/h)两项输入量。算法输入语言变量按W1(正小)~W7(正大)、N0(零)、M10(负大)~M1(负小)进行划分。通过N0、W1、W2、W3、W4、W5、W6、W7共计8个语言变量对△s的论域[0,80]进行描述;通过N0、M1、M2、M3、M4、M5、M6、M7、M8、M9、M10共计11个语言变量对△v的论域[-150,0]进行描述;通过N0、M1、M2、M3、M4、M5、M6、M7共计8 个语言变量对输出量期望减速a 的论域[-10,0]进行描述。纵向速度差隶属度函数、间距隶属度函数、车辆期望减速度隶属度函数分别如图1、图2和图3所示。在确保车辆行驶安全的基础上,综合考虑行人测试工况和乘客的舒适性总结出如表2所示的部分控制规则。
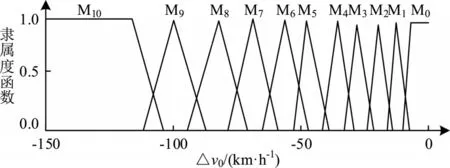
图1 纵向速度差隶属度函数
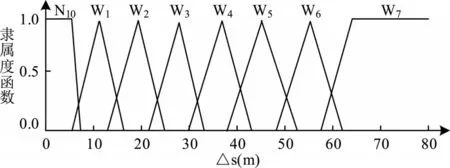
图2 间距隶属度函数
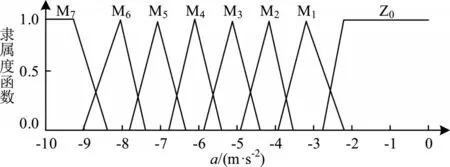
图3 车辆期望减速度隶属度函数

表2 部分算法制动控制规则
2.2 PID控制子系统
PID 控制子系统在获取期望减速度值后会自动将该值转换为车辆制动管路压力,进而实现针对车辆的自动紧急制动[7]。该子系统所需要的驱动参数分别为期望减速度、实际减速与期望减速度之间的差值,经过一系列计算后得到最终的制动管路压力值,而实际减速与期望减速度之间的差值则用于误差控制[8]。PID控制子系统中所含有的参数分别为微分参数(kd)、积分参数(ki)和比例参数(kp),并根据实际减速与期望减速度之间的差值来选取参数值[9]。
3 自动紧急制动系统的仿真实验
3.1 车辆工况
本次研究根据中国新汽车评价规程(CVFA)基于E级前置前驱SUV 车型进行仿真实验,所使用的仿真程序为CarSim,结合车辆轮胎、悬架、制动系、传动系、转身系、车身等结构建立动力学模型,具体参数如表3所示。
3.2 行人工况
本次研究所分析的行人工况具体包括两大类,分别为行人远端横向穿行和行人近端横向穿行,在此基础上依照碰撞位置的不同将远端穿行分别为CVFA-25 和CVFA-50,依照碰撞位置的不同将近端穿行分别为CVNA-25和CVNA-75,具体工况如图4和图5所示。
在图4中,行人的运动轨迹为线段AA,行人的加速距离为G,车辆的行驶轨迹为线段BB,碰撞位置偏移量为C。近端场景25%碰撞位置为M,近端场景50%碰撞位置为K。
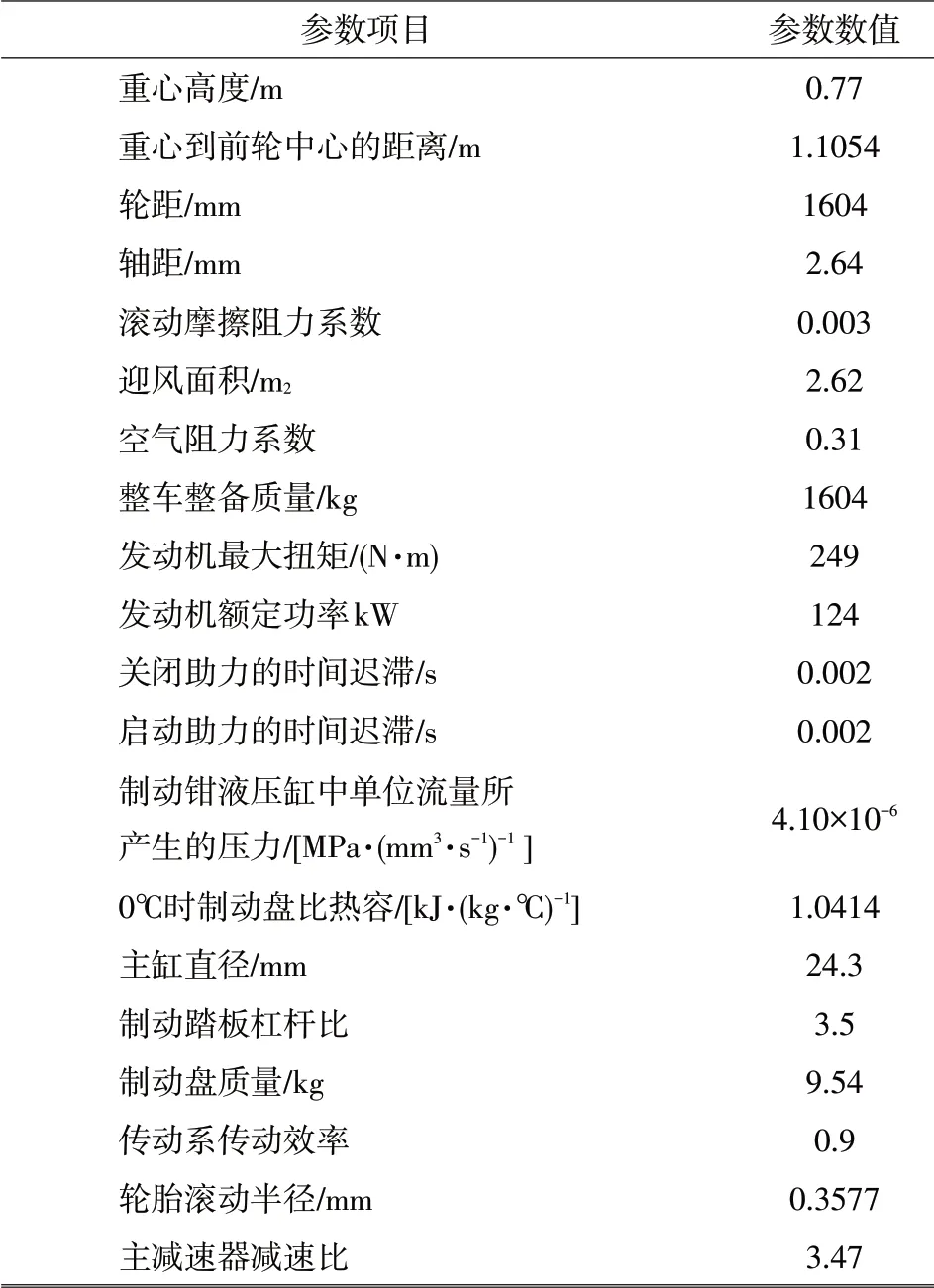
表3 车辆主要参数
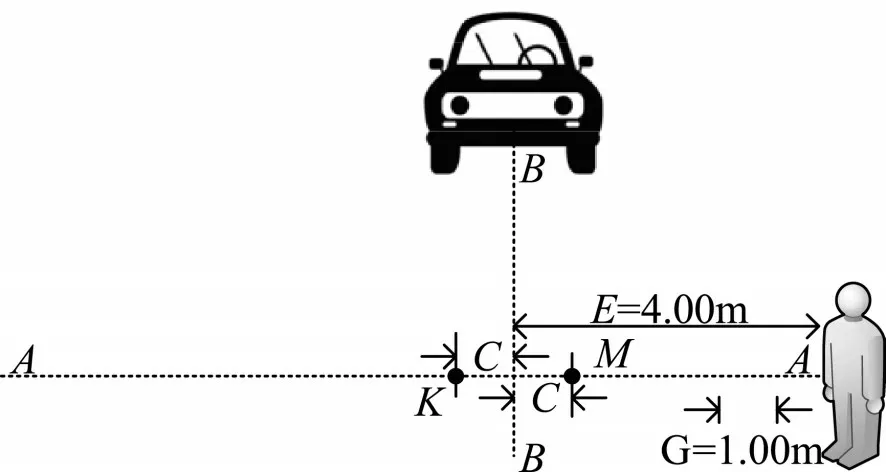
图4 近端行人测试场景
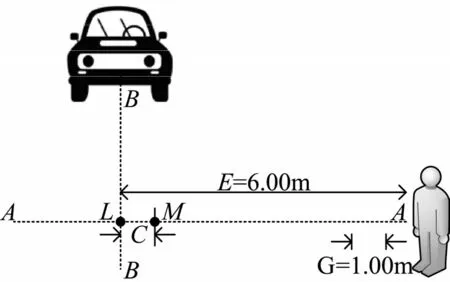
图5 远端行人测试场景
在图5 中,25%远端场景碰撞位置为M,50%远端场景碰撞位置为L,25%远端场景碰撞位置偏移量为C。
本次研究共计设定5 组工况参数,车速分别为20km/h、30km/h、40km/h、50km/h、60km/h。测试场景分别为CVFA-50、CVFA-25、CVNA-25、CVNA-75。其中CVFA和CVNA场景下的行人速度分别为6.5km/h和5.0km/h。
3.3 实验结果分析
本次研究所得出的仿真实验结果如表4-8所示。
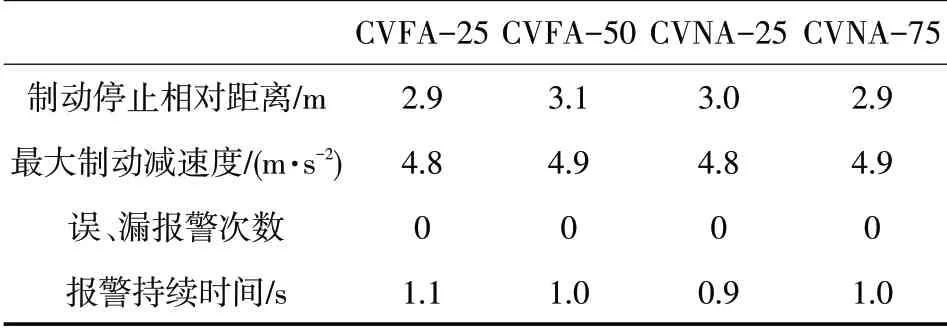
表4 车速20km/h下测试工况仿真结果
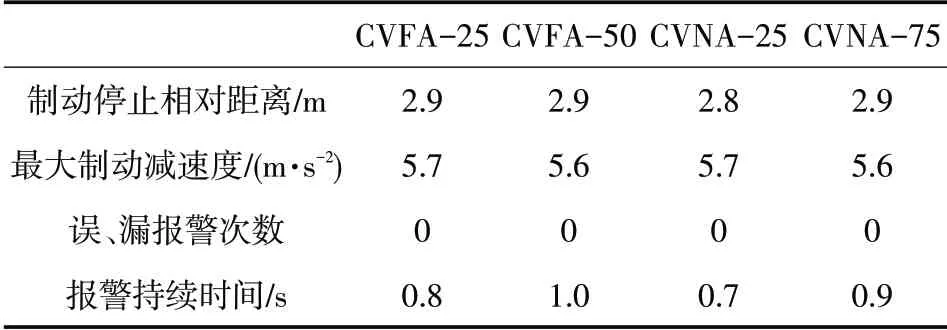
表5 车速30km/h下测试工况仿真结果
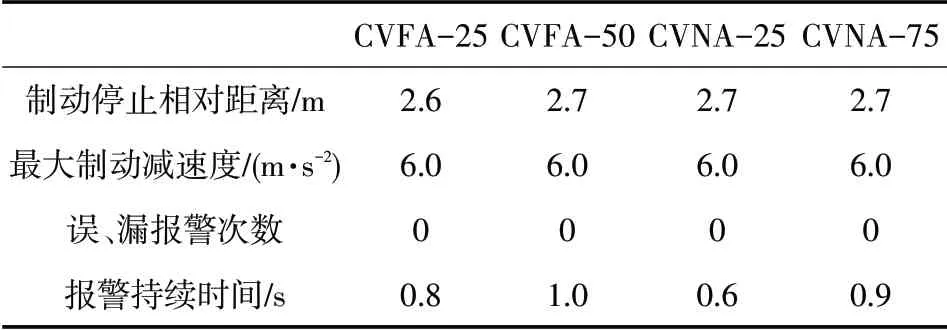
表6 车速40km/h下测试工况仿真结果
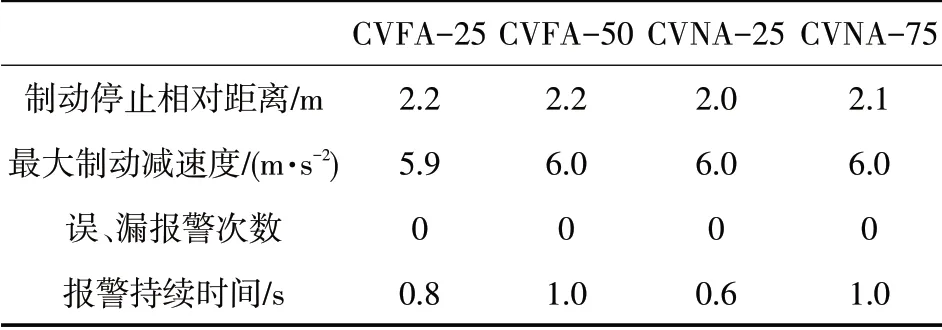
表7 车速50km/h下测试工况仿真结果
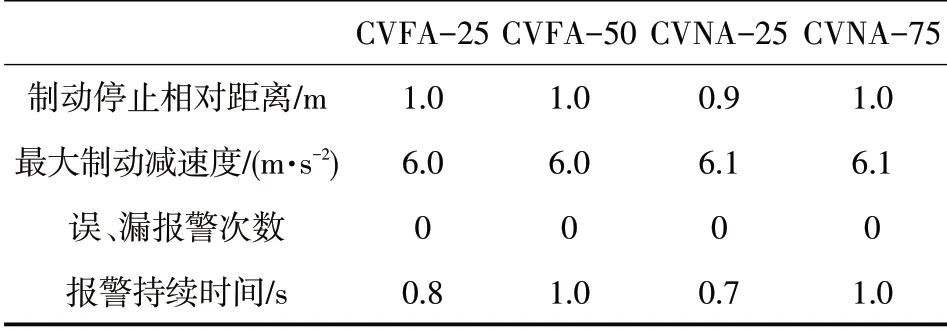
表8 车速60km/h下测试工况仿真结果
根据仿真实验结果可知,在紧急制动的情况下,车辆与行人之间的纵向相对距离保持在0.9~3.1m 之间,不仅可以避免不必要的伤害,也不会给行人或司机造成恐慌;车辆的制动强度范围为0.48~0.61,车辆的减速度控制在4.8~6.1m/s2,属于中等制动强度。在本次实验中,紧急制动系统的漏警次数为0,预警时间仅有1s左右,避撞效果良好。
4 结语
本文对智能网联汽车自动紧急制动系统的设计方法进行了详细的介绍,设计了一个避撞效果良好、制动性能优良的紧急制动系统。仿真实验发现,合理运用计算机算法能够有效提升车辆的安全性,实现高水平的自动化制动。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
意林(2021年5期)2021-04-18 12:21:17
铁道通信信号(2020年3期)2020-09-21 09:13:00
扬子江(2019年1期)2019-03-08 02:52:34
铁道通信信号(2018年8期)2018-11-10 05:15:44
汽车维护与修理(2018年1期)2018-04-04 01:13:22
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:27