
离心式限速器压爪力及主要参数研究*
2021-01-12 10:50运向勇
机电工程技术 2020年11期
王 斌,运向勇
(深圳市特种设备安全检验研究院,广东深圳 518024)
0 引言
随着城市化建设的推进,电梯已成为人们生活中不可或缺的重要垂直交通运输设备[1]。电梯的普及,大幅提高了人们对空间的有效利用,极大方便了人们的生活,是人类在探索城市化建设中重要的文明产物[2]。随着电梯数量的不断增大,人们在享受快捷便利的现代生活的同时,电梯的安全问题也日益突出[3]。
限速器是电梯的重要安全部件[4],在保障电梯安全运行中起着至关重要的作用。限速器能够对电梯的运行速度进行监测,当电梯的速度出现异常超过一定数值时,限速器能够及时地监测到速度的异常,进而触发其电气安全开关,切断电路,使电梯停止运行。若此时电梯未能有效制停,则限速器通过本身的机械结构进一步带动安全钳抱住导轨,使电梯制停,避免电梯失速造成事故[5-7]。
限速器的结构参数特点直接决定着限速器动作时触发力的大小,进而影响着限速器动作时的可靠性和灵敏性。目前,关于限速器的研究,主要是针对其测试和检验方法的研究,而对于限速器动作机理的研究较少。本文以离心式限速器为研究对象,建立了离心式限速器旋转运动时压爪作用力的计算模型,并研究了在不同参数下压爪作用力随着限速器轮旋转速度变化的关系,对离心式限速器的参数选定、机械动作速度调节以及动作性能的评定提供了理论依据。
1 离心式限速器动作原理
离心式限速器的结构如图1 所示。在限速器轮上,两离心块对称布置,并通过连接杆相互连接,可以绕其各自的固定轴相对限速器轮转动。离心块一侧连接有离心块张紧弹簧,其弹簧拉力使离心块保持向轴心张紧。张紧弹簧的张紧力可以通过弹簧一侧的调节螺母进行调节。电梯正常稳定运行时,限速器轮在限速器绳的静摩擦力作用下匀速转动。离心块在张紧弹簧拉力以及离心效应的相互平衡作用下,与限速器轮保持一定的间距,并随着限速器轮转动。电梯速度增大时,离心块的离心效应越明显,并打破与弹簧张紧力的稳定状态,远离轴心向外摆动,与限速器轮轴心的间距增大。当电梯速度达到限速器电气动作速度时,其离心位移触发电气开关打杆,使限速器电气开关动作。当速度进一步增大时,离心块的离心效应也逐渐增大,进一步远离旋转轴心向外位移,当速度达到限速器机械动作速度时,离心块相对限速器轮的位移触发压爪的运动,使棘爪得到释放。释放的棘爪在棘爪弹簧的拉力作用下卡入固定在限速器轮上的制动棘轮棘齿之间,使棘轮与限速器轮制停,进而触发安全钳的联合动作使电梯轿厢制停。

图1 离心式限速器结构图
2 限速器离心块系统运动模型
由限速器的动作原理可知,当限速器轮转动时,离心块的离心作用力随着限速器轮转动速度以及离心块与轴心的间距的变化而改变。以离心块为研究对象,以限速器轮转动角度θ以及离心块偏移角度φ为参考,建立广义坐标系,离心系统的受力分析如图2所示。限速器轮旋转时,两离心块在离心作用下偏转一微小角度φ,并沿着径向产生微小偏移δ,系统在弹簧力FT以及压爪作用力Fc下保持平衡。
限速器轮运行时,离心块也随之运动,因而离心块具有动能,同时,弹簧在离心力效应作用下得到一定程度的拉伸,因而具有弹性势能。离心块系统的动能可以表示为:


图2 离心块系统受力分析图
式中:m1、m2分别为两离心块的质量;φ为离心块沿着其各自的固定轴心所转过的角度;θ为限速器轮的旋转角;r为离心块质心与限速器轮轴心的距离;δ为离心作用径向偏移量。
离心块在随着限速器轮转动的同时,由于离心作用,两离心块将向轮外侧相对于限速器轮发生一定的位移,并沿着其各自在限速器轮上的固定中心旋转一定的角度,由于两离心块沿限速器轮轴心中心对称布置,因此离心块重力势能的变化忽略为0,则势能体现为弹簧储存的弹性势能以及连杆的重力势能,其可以表示为:

式中:K1为离心块张紧弹簧的弹性系数; Δx为弹簧的形变量;m3为连杆的质量;r2为连杆质心与限速器轮轴心的距离。

由于实际过程中,离心块在离心效应下的偏移量很小,因此其旋转角度φ可以按下式计算:式中:d3为离心块偏转轴心到弹簧作用点的距离;d1为离心块质心与其偏转轴心的距离。
将式(3)分别代入式(1)以及式(2),可得:

对于离心块系统,其广义力为压爪压力Fc以及弹簧初始预压力F0所提供的平衡力矩。因此,离心块系统的广义力可以表示为:

由拉格朗日广义力方程[8]:

其中:

结合式(4)~(6)可得离心块系统的运动方程为:

设定两离心块的质量均为m,对上式进行整理可得:

由上式可知,提供离心式限速器机械动作触发作用的压爪作用力主要与离心块质量、限速器轮旋转角速度、离心块几何形状、张紧弹簧预压力、张紧弹簧作用位置以及张紧弹簧弹性系数有关。
3 离心式限速器压爪作用力影响因素
离心式限速器是由压爪动作进而释放棘爪来实现超速时的机械动作,因此,压爪作用力的大小和变化情况直接影响着限速器机械动作触发的情况。式(10)建立了压爪作用力与离心块系统结构参数以及限速器轮旋转速度之间的关系,因此,只要通过控制变量的方法,便能得到离心块系统各结构参数对压爪作用力的影响关系。在本文中,选取离心块质量、张紧弹簧初始预压力以及张紧弹簧弹性系数为主要变量,以节圆直径为240 mm的离心式限速器为例,其他基本参数设定为d1=55 mm,d2=15 mm,d3=40 mm,r=60 mm,φ=8°。
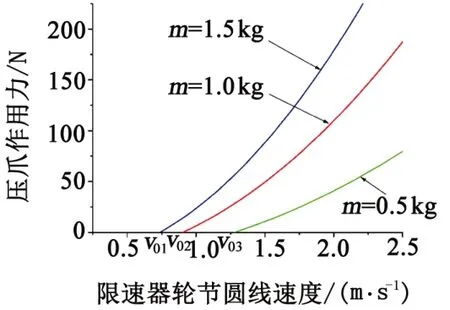
图3 离心块质量对压爪作用力的影响
设定张紧弹簧初始预压力为10 N,弹簧弹性系数为100 N/m,以离心块质量为研究变量,设定质量分别为0.5 kg、1.0 kg、1.5 kg,压爪作用力随着限速器轮转动速度的关系如图3 所示。由图可知,当限速器轮慢速旋转时,由于此时离心作用较小,离心块系统在张紧弹簧预压力的作用下能够保持平衡,因此此时压爪与棘爪之间并无作用力,离心块系统随着限速轮同步旋转而无相对偏转。随着限速器轮旋转速度的不断增大,离心作用逐渐增强,当旋转速度超过临界值(如图3 中v01,v02,v03所示)时,弹簧预压力已经无法使系统保持相对平衡,此时,离心块系统与限速轮之间开始发生相对偏转,压爪与棘爪之间开始产生力的作用。随着离心块质量的增大,压爪与棘爪之间产生作用力所需的临界旋转速度越低。当旋转速度大于临界旋转速度时,压爪作用力也随着旋转速度的增大而增大。离心块质量越大,压爪作用力随着旋转速度增大的幅度越明显,即离心块系统相对于旋转速度反应的灵敏程度越高,体现为曲线在同一速度下的斜率越大,此时,限速器越容易达到机械动作所需的压爪作用力而触发动作。

图4 张紧弹簧初始预压力对压爪作用力的影响
设定离心块质量为1.0 kg,弹簧弹性系数为100 N/m,以张紧弹簧的初始预压力为变量,设定其值分别为10 N、15 N、20 N,得到压爪作用力的变化关系如图4所示。由图可知,随着预压力的不断增大,压爪与棘爪之间产生作用力所需的临界旋转速度越大,限速器机械动作速度也不断增大。当限速器旋转速度达到临界速度以后,不同的初始预压力下,压爪作用力随着旋转速度变化的幅度相同,因此,初始预压力的值仅影响临界旋转速度的大小,而对离心块系统相对于旋转速度反应的灵敏程度无关。
以张紧弹簧弹性系数为变量,设定弹性系数分别为100 N/m、500 N/m、1000 N/m,设定离心块质量为1.0 kg,弹簧初始预压力为10 N,压爪作用力随着限速器轮旋转速度的变化关系如图5所示。由图可知,相比于离心块质量以及初始预压力,弹性系数对压爪作用力的影响较小,其影响趋势大致与弹簧初始预压力对压爪作用力的影响情况类似。弹性系数越大,限速器轮临界旋转速度越大,触发机械动作所需的速度也越大,弹性系数的大小同样不影响离心块系统相对于旋转速度反应的灵敏度。
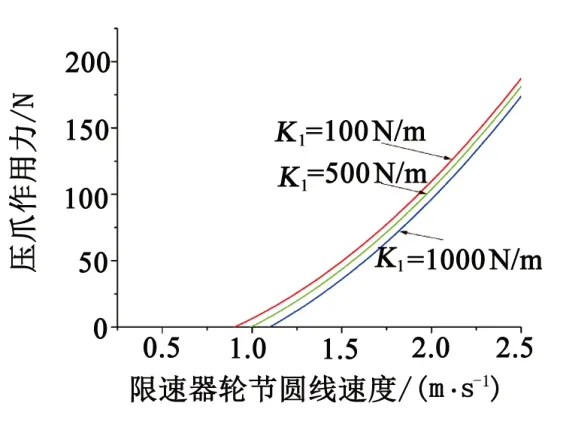
图5 张紧弹簧弹性系数对压爪作用力的影响
4 结束语
本文以离心式限速器为研究对象,建立了离心式限速器旋转运动时的拉格朗日运动方程,并研究了离心块质量、弹簧初始预压力以及弹性系数对压爪作用力的影响情况。随着复工复产的进行,后续将计划进一步展开对文中模型的现场实验研究。从本研究中,可以得出如下结论。
(1)离心块质量对限速器压爪作用力的影响最为显著,不仅影响压爪与棘爪之间产生作用力的临界旋转速度大小,同时也影响离心块系统相对于旋转速度的反应灵敏程度。质量越大,所需的临界旋转速度越小,而灵敏性越高,限速器越容易达到机械动作所需的压爪力而触发动作。
(2)弹簧初始预压力仅影响临界速度的大小,而对系统反应灵敏性无关。初始预压力越大,所需的临界速度越大,限速器机械动作速度也越大。
(3)张紧弹簧弹性系数对压爪作用力的影响较小,其影响情况与预压力对压爪力的影响情况类似,弹性系数越大,限速器机械动作速度越大,弹性系数的大小不影响系统相对于速度的反应灵敏程度。
猜你喜欢
中国金属通报(2021年21期)2021-11-19
航空发动机(2021年1期)2021-05-22
山西冶金(2020年3期)2020-07-15
机械管理开发(2020年2期)2020-04-16
上海节能(2020年3期)2020-04-13
少儿科学周刊·少年版(2020年9期)2020-03-04
中国设备工程(2020年8期)2020-01-19
科学导报·科学工程与电力(2019年17期)2019-10-21
石油化工建设(2019年4期)2019-10-10
大众汽车(2019年1期)2019-04-24
