无人机高功率密度变换器设计
2021-01-12 03:55刘小涵刘希军
无线互联科技 2020年24期
刘小涵,彭 旭,刘希军
(中国民用航空飞行学院,四川 广汉 618307)
0 引言
随着科技的快速发展,随着平台、算法、交互方式的不断更新和突破,人工智能技术也逐步走向成熟,涉及的领域也逐渐具体化、民用化[1-3]。无人机作为一种高科技产品越来越受到人们的喜爱,目前在航拍、农业、自拍、快递运输、灾难救援等领域起着至关重要的作用,这也大大地拓展了无人机的市场[4-5]。
伴随着无人机应用领域的不断延伸,如何进一步减小无人机的体积和提高充电效率也成了近几年的研究重点,为了使无人机有更好的续航里程,有学者提出了选用储能密度更高的锂电池作为无人机的供电单元,同时锂电池的体积也相对小很多[6-8]。无人机充电的效率主要依靠其中的DC-DC变换器的效率,同时减小变换器的体积对进一步减小无人机的体积也起到确定性作用,因此研究一个高功率密度的无人机充电用变换器显得相当重要[9-10]。
1 无人机变换器的拓扑结构设计
1.1 隔离与非隔离型拓扑选择
根据变换器结构中是否有变压器进行电气隔离,可以将传统的DC-DC变换器分为隔离型变换器和非隔离型变换器两种类型。
在无人机充电系统中,一般采用降压型变换器,降压至15-18V才能给无人机的电池充电,所以要求降压比很大的变换器。非隔离型变换器适用于升降压范围比较小的情况,对于这种降压较高的情况应该选用隔离型变换器。通过对比发现正激式和反激式拓扑电源侧不连续,谐波含量大;推挽式拓扑对变压器绕组的利用率太低、对功率开关管的耐压能力要求比较高;半桥式拓扑中半桥式开关电源会出现半导通区,损耗大。相比之下全桥式拓扑具有很明显的优势:开关管应力相对较小,钳位或体二极管回路结构便于磁复位和尖峰抑制,有助于提高变换器整体效率,容易实现软开关等,因此针对无人机降压变换器应该选用全桥结构。全桥变换器拓扑如图1所示。
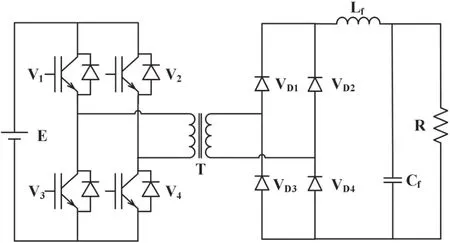
图1 全桥变换器拓扑
1.2 驱动结构选择
针对全桥变换器的驱动部分本文选择了控制简单,容易实现软开关的移相控制。移相控制的工作原理是:位于同一桥臂上的两个开关管导通角差180°,位于对角线上的两个开关管导通角相差一个角度,即所谓的移相角,当输入电压变化时,要求输出电压还是稳定在要求的电压值时,就可以通过对移相角的调节来完成。移相控制原理如图2所示。
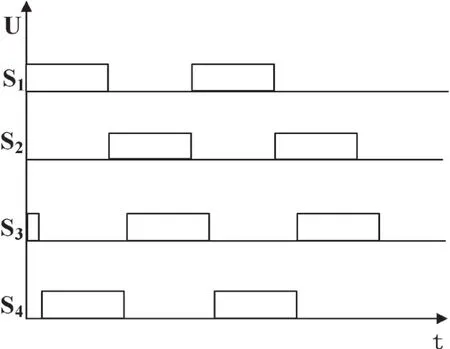
图2 移相控制原理
软开关分为零电压开关(ZVS)、零电流开关(ZCS)和零电压零电流开关(ZVZCS)3种。零电压全桥软开关变换电路由于原边有较大的环流,副边占空比丢失比较大,这种占空比的丢失会使整流二极管的电压应力增加,由于滞后桥臂实现零电压软开关的范围与输入电压和负载两个因素有关,所以在轻载时零电压软开关会比较难实现。因此本文设计的变换器采用ZVZCS软开关技术,设计的变换器的拓扑结构如图3所示。
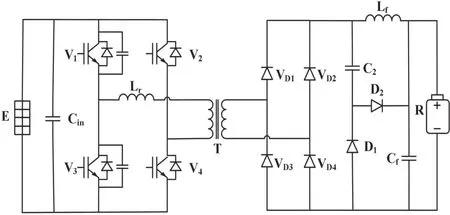
图3 设计的变换器的拓扑结构
2 无人机变换器的控制策略设计
针对降压变换器的基本控制电路有电压闭环模式和电流闭环模式。电流闭环是将输出电流作为闭环控制系统输入的方式。电流模式最大的优点就是系统响应很快,但是涉及对主电路中电感电流的采集,使得实际实现电流闭环相对复杂且成本昂贵。同时还需要增加斜坡补偿模块,加大了设计难度。针对本文设计的无人机降压变换器,本文采用双闭环控制策略,它包括内环控制和外环控制两种系统,外环是对电压控制,内环是对电流控制。整体控制框如图4所示。
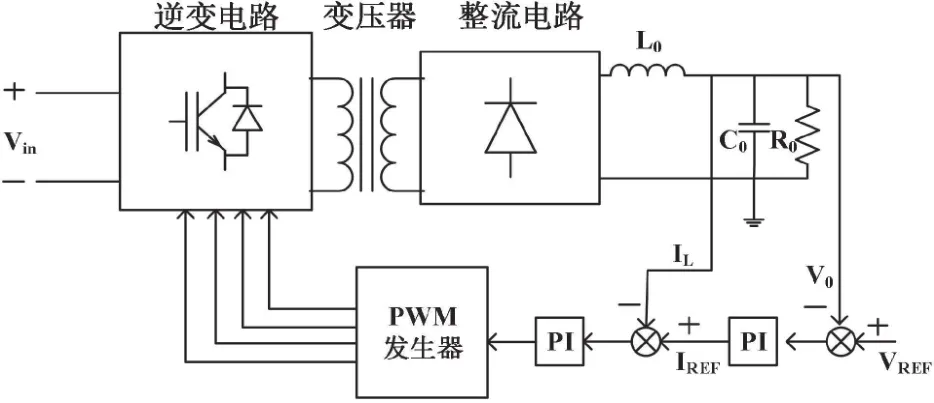
图4 无人机降压变换器的控制框
3 仿真分析
图6所示为仿真波形分析,可以看出无人机电池接入变换器后波形稳定。

图5 电池接入变换器过程输出侧电压电流波形
4 结语
本文主要针对现有无人机用降压变换器存在的效率低、体积大、重量重等缺点,设计了高功率密度的DC-DC变换器,能够较大程度地满足小型化、轻量化、高功率密度、高效率的要求。并且通过仿真结果验证了所设计的无人机降压移相全桥变换器的主电路结构、参数设计和电压电流双闭环控制策略满足要求。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
石材(2020年7期)2020-08-24
测控技术(2018年1期)2018-11-25
电子测试(2018年14期)2018-09-26
电子制作(2018年11期)2018-08-04
电测与仪表(2016年4期)2016-04-11
专用汽车(2016年4期)2016-03-01
铁道科学与工程学报(2015年4期)2015-12-24
电测与仪表(2015年23期)2015-04-15
电测与仪表(2015年3期)2015-04-09