基于“互联网+”的高压线验电器与接地线智能管理装置的实现
2021-01-08 05:44:42王济维殷有钧
科学技术与工程 2020年34期
李 伟,王济维 , 孙 轲,李 洋,殷有钧,李 波
(1.电子科技大学成都学院,成都 611731; 2.四川云新电力科技有限公司,成都 610213)
高压验电器是用来检测高压电力线是否带电用的设备,而接地线则是用来短接电力线施工区域两端的设备,防止两端反供电[1]。目前,中国使用的验电器按照电压、功率分类的不同类型较多[2-3],配套的接地线类型也较多,但在实际使用中,验电器灵敏度不高,存在误报警、拒报警等情况,让高压电力检修人员面临巨大安全隐患。加之设备数量多,管理方面非常混乱,每年造成大量人员触电身亡事故。据国家能源局统计,在2018年全年,中国发生电力人身伤亡事故40起、死亡41人、重伤3人[4],而这其中因为高压电力检修不规范发生安全事故数量为27起,这些数字背后带来的电力设备使用与检修施工安全问题急需有效解决。当下中外对验电器和接地线设备的管理与实际使用监管主要采用如物联网技术、智能视频技术、射频识别(radio frequency identification,RFID)技术、红外感应、机器对机器通信(machine-to-machine,M2M)、大数据检测等技术方式[5-9],实现了对验电器和接地线等设备的监管与统计,从技术层面对验电器设备自身安全性能做了提高与操作便捷化设计,但并没有采用电子技术实现使用过程全监管与设备操作使用唯一性保障,在事故发生之后也无法明确事故责任,带给企业与监管部门较大压力,因此要做到检修设备使用准确可靠,对施工人员在户外严格按照操作手册施工的过程监管,仅靠传统的制度保障和人力保障[10-11],已不能够满足当下高压电力检验检修施工操作的实际需求。
从高压检修设备管理角度来看,设备的出库、入库管理,设备在整个使用环节中的过程监管,施工人员对验电器、接地线等设备的正确使用等,是保障施工安全必要环节,也是当下验电器、接地线设备发展的研究热点,未来研究将朝着更高电压等级、更高精确度、更便携、更安全、更智能的方向发展[12-14]。
在此,设计一种基于“互联网+”的平台化管理模式,实现对验电器和接地线设备的出入库管理、设备使用记录、对施工人员在施工流程的操作流程监控、对施工地理位置实时定位、对施工场景拍照留存等功能,从而实现对每台验电器、接地线设备的生命周期全程跟踪,对每台设备的使用操作过程全程跟踪,通过技术方式规范验电器和接地线使用操作,对施工人员的操作方式全程监管,实现数据远程记录与查询,后台可评判操作规范,可查询具体人员信息与位置,设备可远程报警。从而,对高压电力检修施工操作起到规范化管理,对施工人员生命安全起到一定的保护作用。
1 监测管理方式构建
1.1 系统组成
系统构建分为4部分:设备端、服务器端、前端和库房管理。设备端主要是安装到验电器和接地线上用于获取具体操作人员身份信息和位置数据的装置;服务器端包括云端数据库、后台与服务器;前端由PC(personal computer)端和移动APP(application)端组成,PC端用于管理人员对设备管理、数据管理和设备使用的查看监管等,APP作为施工人员现场信息确认使用,包括拍照上传场景照片等;库房管理主要负责设备的出库入库信息录入系统(电子枪扫码)、设备领取人员身份信息录入系统(采集领取人指纹信息并输入姓名与部门)、库房设备充电等操作。系统组成结构如图1所示。
设备端包括验电器打卡设备和接地线上的接地端打卡设备、接线端打卡设备组成。设备要求满足能在野外、山上使用场景运行;技术要求能够确认施工操作人员的唯一性,能够获取准确的施工操作地理位置,能够严格监测施工中对接地线使用的操作顺序,采集数据能够无线实时传输后台,设备充一次电(充满)能够正常工作1 周(低功耗),对接地线上两端设备能够定时自动初始化(10 h),设备防止误操作需要延时开机(按3 s开机),设备体积小巧轻便便于安装,耐摔、耐磨、防水、防尘等。
设备端组成结构如图2所示。
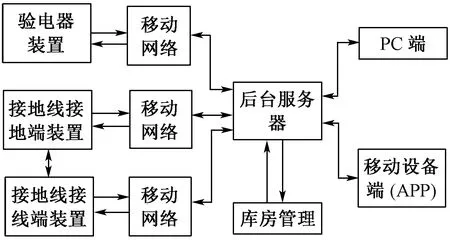
图1 验电器、接地线智能管理系统组成Fig.1 Electroscope, grounding line intelligent management system
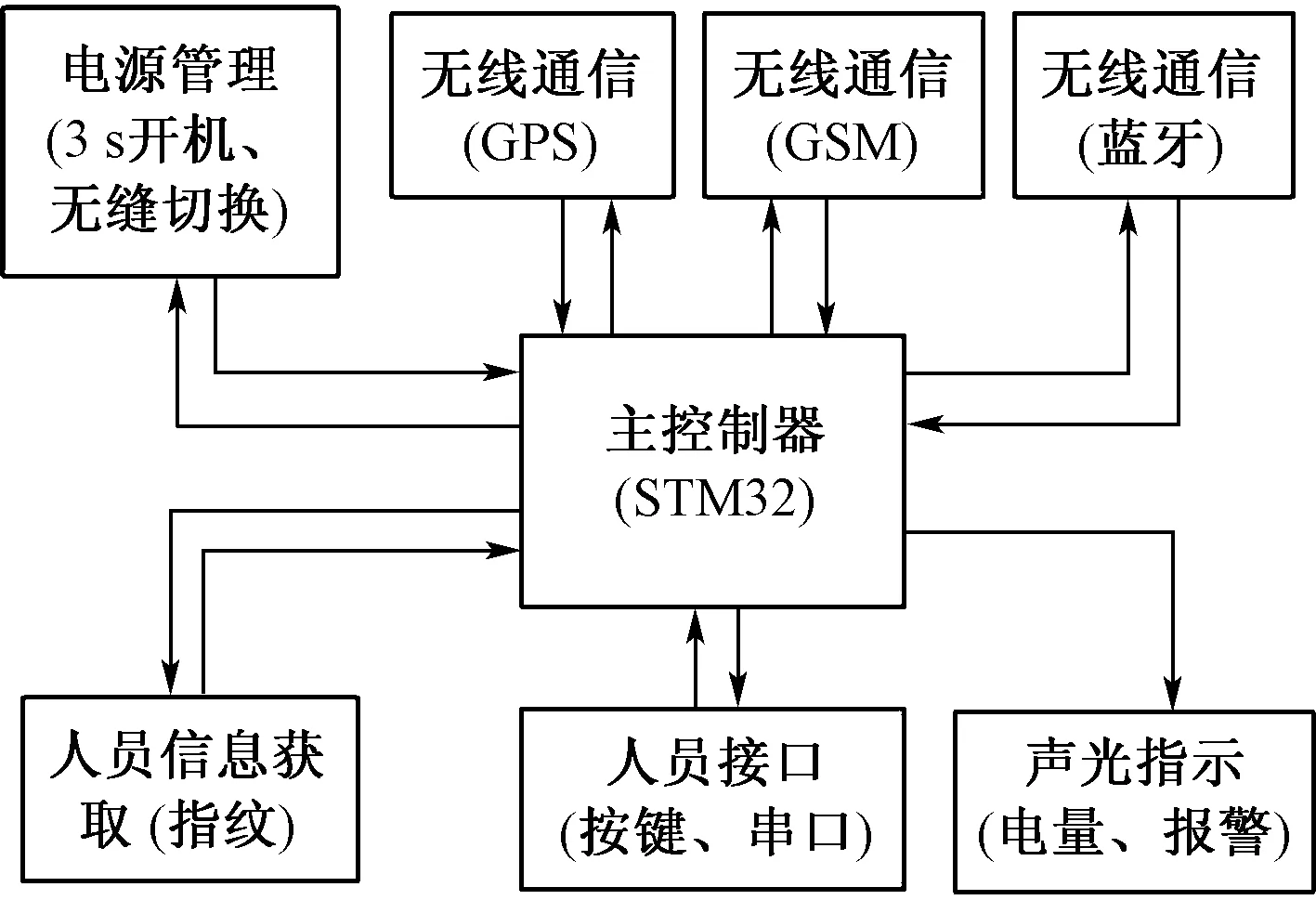
图2 设备端技术构建Fig.2 Device-side technology construction
1.2 设备端采用技术
1.2.1 主动式电容指纹传感器
指纹数据采集通过主动式指纹模块实现。该类型指纹模块具有灵敏度高、动态响应特性快、适应性强、抗过载能力强等特点[15]。其检测原理是将驱动信号加到被检测手指上,以增强手指表面所带电荷,手指接触到电容感应器时,电容感应器会根据指纹纹路带来的波峰与波谷的不同形成电荷差,感应电荷数据经过转换放大,形成指纹纹路的电荷数据,经过一定的数学处理,即可得到指纹图像信息,如图3所示。
手指上的电压改变率与其上的电容值的比例关系为
(1)
式(1)中:IREF为参考电流;C为电容值;dV为电压变化值。不同的放电率经过采样电路检测,转换为8位数据输出,即得到原始指纹图像数据[16]。
电容式指纹模块获取指纹数据与比对流程如下。
(1)数据库采集指纹。打开设备→获取指纹图像→生成特征1→获取指纹图像→生成特征2→合成指纹模版→存储特征1到指纹数据库。
(2)设备采集指纹比对。打开设备→获取指纹图像→生成特征1→加载指纹库特征2→对比特征1与特征2→返回位置及得分。
指纹图像获取指令如表1所示。
指纹特征值获取程序如图4所示。
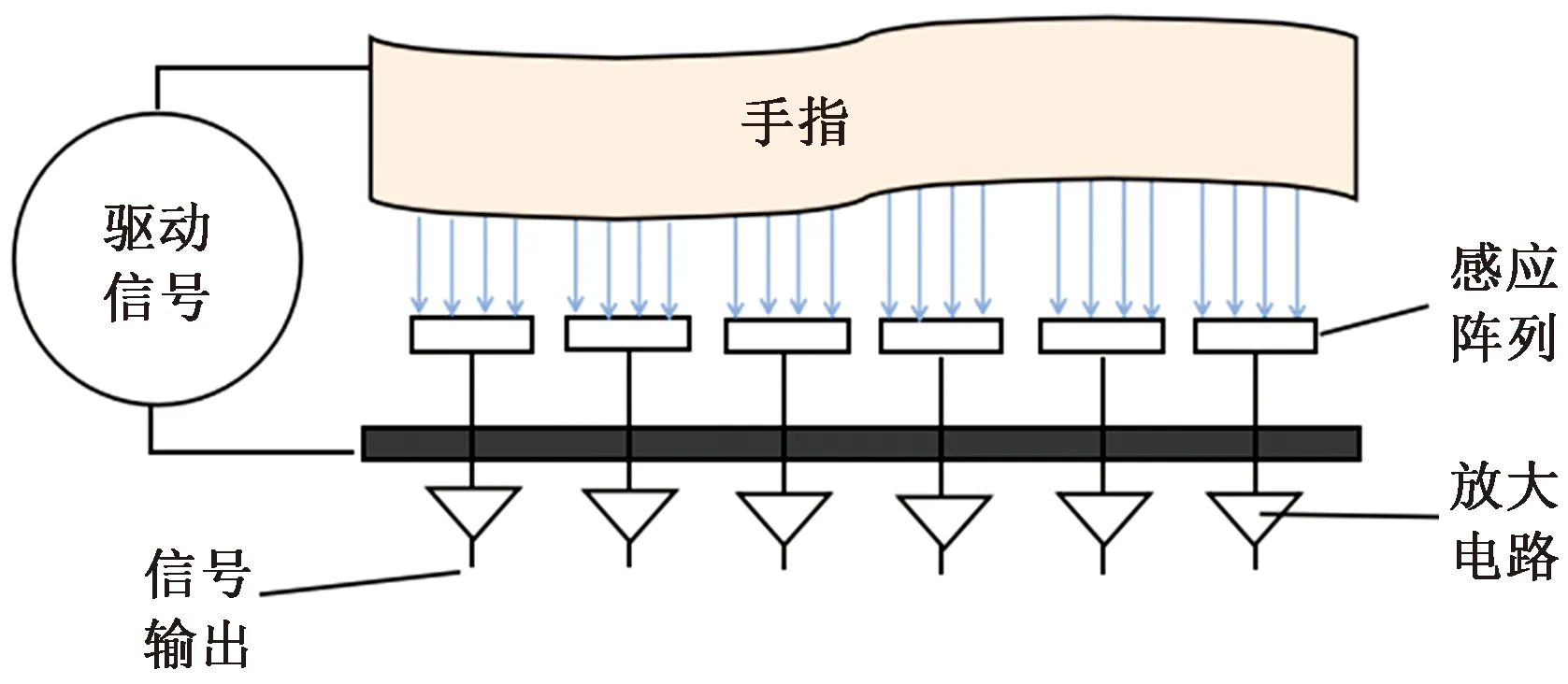
图3 主动式指纹传感器示意图Fig.3 Active fingerprint sensor
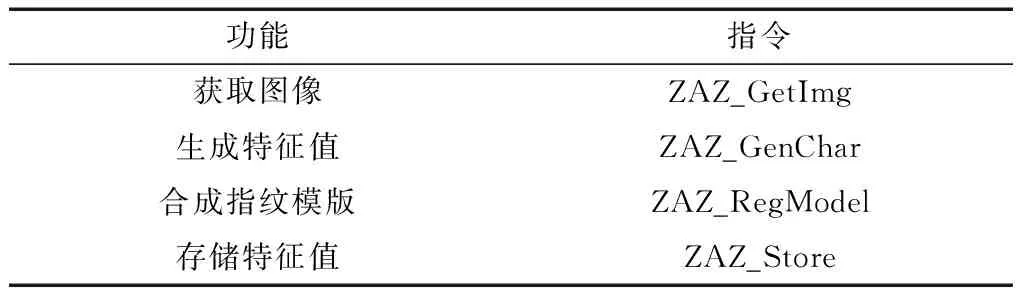
表1 指纹图像获取指令表
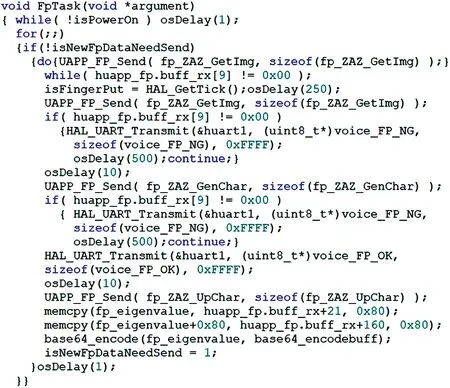
图4 指纹特征值获取程序Fig.4 Fingerprint feature value acquisition program
1.2.2 传输数据格式转换
指纹模块采集到的每一枚指纹特征值数据是256 Byte的十六进制数据,而基于TCP/IP(transmission control protocol/internet protocol)协议传输数据不能直接传输十六进制数据,需要做数据转换。设计中采用Base64编码方式实现将十六进制数转换为字符串。Base64编码原理是将每3个8bit的字节转换为4个6bit的字节,然后把6bit数据的最高两位加00,构成4个8bit的字节[17]。
指纹模块读取的原始指纹特征值(十六进制)如下:
unsigned char bin_data[256]={03,01,50,14,00,00,00,
00,00,00,00,00,00,00,80,00,80,00,80,00,80,00,80,00,80,00,80,00,80,00,80,00,80,00,80,00,80,02,FF,FE,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,55,8D,D6,1E,41,8E,01,FE,17,96,5D,9E,3A,23,C2,BE,55,AF,2C,FE,56,B5,40,9E,46,19,C0,DF,4A,35,D9,DC,4B,0E,2C,BA,49,AC,81,1A,3F,B7,02,FA,37,0B,82,9B,42,B3,C2,9B,4B,AF,59,39,32,0C,C4,F6,3B,86,16,74,24,0D,4A,15,29,8D,05,71,13,8D,45,71,4B,0A,C0,2B,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00,00};//
原始256 Byte指纹数据,即直接读取出来的特征值数据。
对指纹数据采用Base64编码后的数据格式为
base_64bin:{"AwFQFAAAAAAAAAAAAACAAIAAgACAAIAAgACAAIAAgACAAIAAgAL//gAAAAAAAAAAAAAAAAAAAABVjdYeQY4B/heWXZ46I8K+Va8s/la1QJ5GGcDfSjXZ3EsOLLpJrIEaP7cC+jcLgptCs8KbS69ZOTIMxPY7hhZ0JA1KFSmNBXETjUVxSwrAKwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA=="};//
采用JSON将Base64编码后的字符串通过HTTP发送到后台服务器,如下所示。
POST/dev/devicemanage/saveDeviceData.do HTTP/1.1 Content-Type:application/json;charset=UTF-8
Host:47.107.183.195
Content-Length:389
{"AwFQFAAAAAAAAAAAAACAAIAAgACAAIAAgACAAIAAgACAAIAAgAL//gAAAAAAAAAAAAAAAAAAAABVjdYeQY4B/heWXZ46I8K+Va8s/la1QJ5GGcDfSjXZ3EsOLLpJrIEaP7cC+jcLgptCs8KbS69ZOTIMxPY7hhZ0JA1KFSmNBXETjUVxSwrAKwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA=="};//
为了匹配数据,在传输的指纹数据前端加上了设备编号、设备型号标志、数据匹配标志等信息。
1.2.3 随机数生成方式
发送指纹数据与发送实时定位坐标数据是分开发送的,要求每次发送的这两条数据必须匹配,这样后台才能通过匹配标志判断这两条数据为一次完整的操作过程,因此用一个随机数做数据匹配标志。
基于C语言的随机数软件生成方式如下:采集每次设备开机所用时间time(NULL)作为随机数时间种子,然后用随机数生成函数srand()实现随机数生成[18]。由于时间每秒都在递增,因此time(NULL)也就在不断变化。函数如下。
int main()
{
srand(time(NULL));
int k;
for (k=0; k< 10; k++)
printf("%d, ",srand()%11);
}
代码中的变量k决定了生成随机数的数据位宽。
随机数生成程序如图5所示。
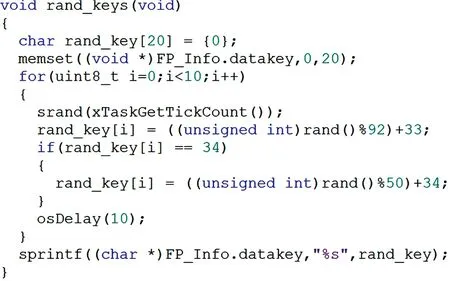
图5 随机数生成程序Fig.5 Random number generator
1.2.4 定位数据获取方式
定位原理是利用已知坐标(基站或卫星),通过通信信号时差得到相对距离与角度差,然后采用三角函数计算得出设备当前的坐标位置[19]。参考坐标系如图6所示。
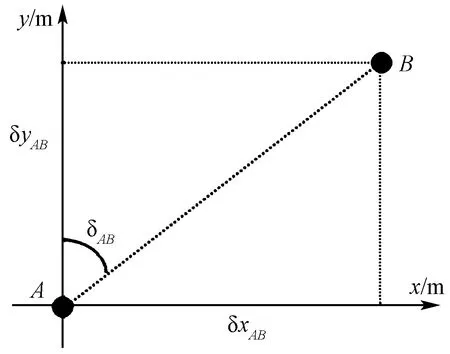
图6 坐标系Fig.6 Coordinate system
设A、B两点的坐标分别为(X1,Y1,Z1),B(X2,Y2,Z2),AB两点距离计算公式为

(2)
已知A点坐标,B点坐标计算公式为
xB=xA+δxAB,yB=yA+δyAB
(3)
δxAB=|AB|sinδAB,δyAB=|AB|cosδAB
(4)
式(4)代入式(3)即可得到B点坐标:
xB=xA+|AB|sinδAB
(5)
yB=yA+|AB|cosδAB
(6)
式中:xA为A点x轴坐标;yA为A点y轴坐标;xB为B点x轴坐标;yB为B点y轴坐标;δxAB为AB两点在x轴上的坐标差值;δyAB为AB两点在y轴上的坐标差值;δAB为AB两点距离连线与y轴的夹角。
设备使用中需要确定当前施工人员是否在规定区域使用设备,需要设备发送实时定位信息到服务器。采用全球定位系统(global positioning system,GPS)+基站定位相结合的方式实现。由于GPS信号受环境因素影响较大,有些地方无法获取GPS坐标或者获取较慢,加入基站定位作为GPS定位获取的辅助方式[20]。由于基站定位数据误差较大,在使用中,优先使用GPS定位数据,当GPS获取坐标数据过程超过30 s还未获取到时,获取的定位数据自动切换成基站定位数据并发送。定位坐标数据获取流程如图7所示。SIM868获取基站定位数据操作指令如表2所示。
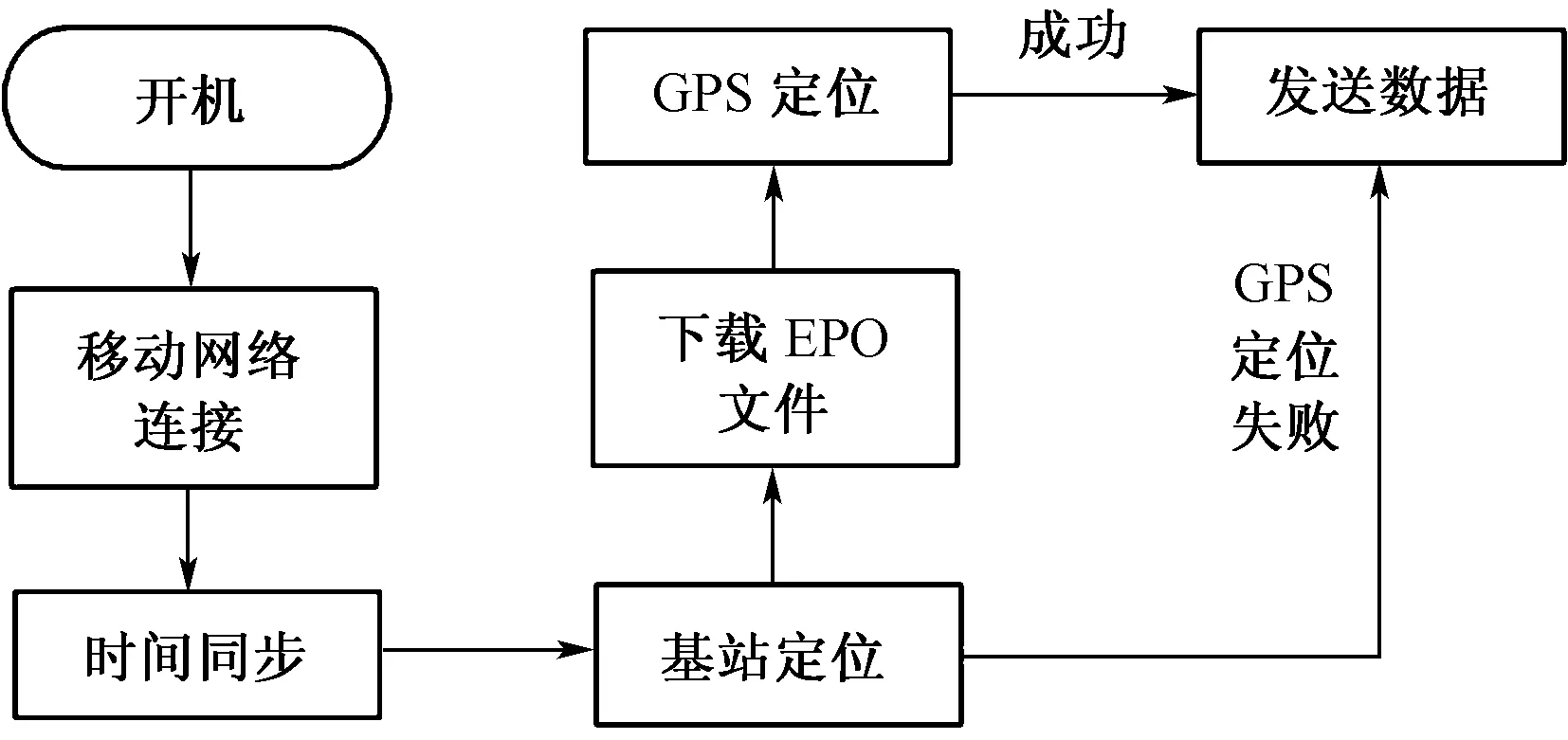
图7 定位数据获取流程Fig.7 Positioning data acquisition process
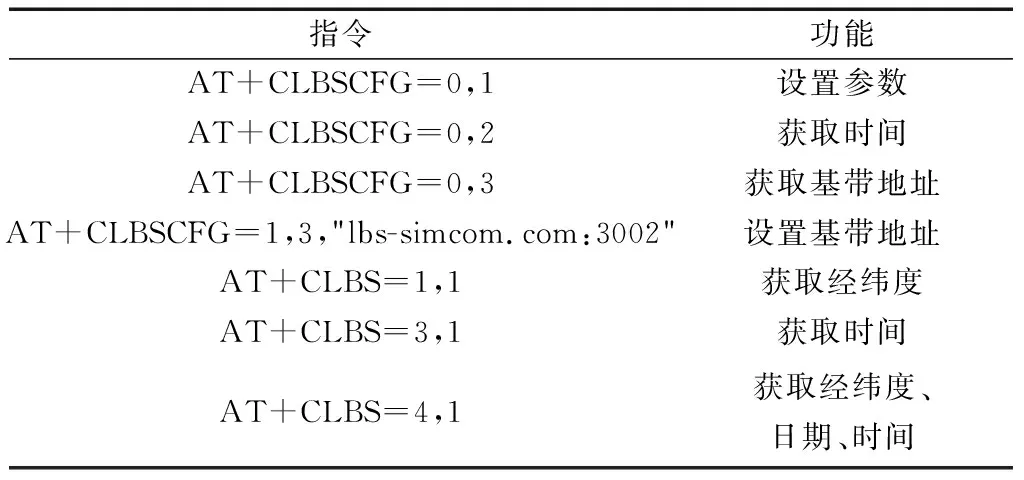
表2 SIM868获取基站定位数据操作指令
使用轨道预报(extended prediction orbit,EPO)文件可以减少定位数据获取时间,尤其是在室外开放空间区域,10 s就可以获取定位数据[21]。在EPO操作之前,世界标准时间(universal time coordinated,UTC)非常重要,因为模块将根据UTC时间来验证EPO数据的有效期。通过AT+CLTS=1/AT&W开启同步网络时间功能。模块启动时会从网络同步时间,并且把该时间更新到UTC时间,UTC时间可以通过"AT+CCLK? "命令查询得到。EPO文件获取可以从HTTP服务器获得MTK EPO文件。MTK HTTP服务器会提供EPO文件,并每天更新。EPO获取操作指令如表3所示。
EPO轨道预测过程如下。
(1)确认模块通用无线分组业务(general packet radio service,GPRS)连网注册成功。
(2)同步UTC时间。
(3)从MTK HTTP服务器获取EPO文件并存储到模块文件系统中。
(4)使能全球导航卫星系统(global navigation satellite system,GNSS)服务并将EPO文件传送到 GNSS模块。
(5)从GNSS模块读取定位位置信息。
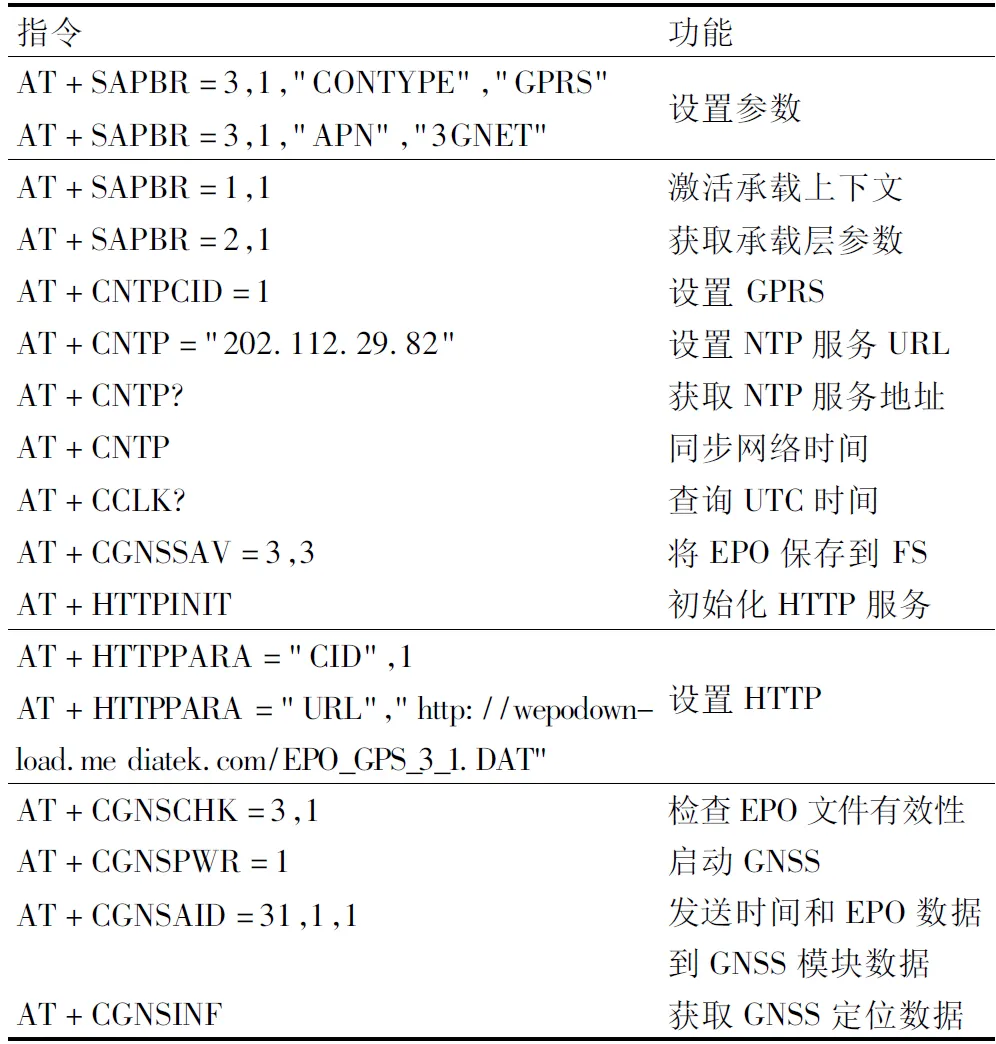
表3 EPO获取的操作指令
程序实现过程如下。
(1)检查EPO文件是否存在或过期,如果不存在则重新下载。
(2)将EPO数据、UTC时间、基站获取的当前经纬度数据写入GPS模块。
(3)GPS模块搜星,使用写入的EPO文件获取卫星轨迹并快速计算当前坐标值。
下载EPO文件程序如图8所示。
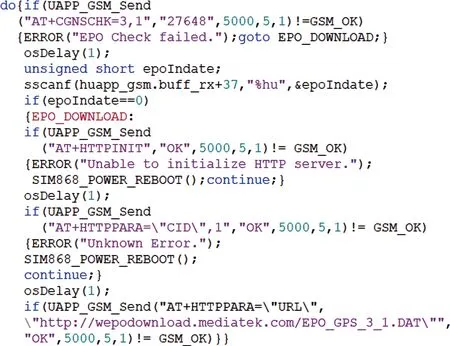
图8 下载的EPO文件程序 Fig.8 EPO file downloaded
1.2.5 接地线管理模式
接地线分接地端和接线端两个端子,在施工使用中要求操作顺序如下:①安装接地端;②安装接线端;③拆除接线端;④拆除接地端。①②为安装顺序,③④为拆除顺序。为了让监管过程满足以上顺序,就需要两台设备之间互相建立通信授权机制,如图9所示。
安装接地线:接地线两端设备开机,操作接地端打卡(接线端不能操作,将等待接地端设备发过来的授权操作命令),打卡成功后接地端设备将通过蓝牙通信发出授权命令,然后自身进入锁死状态,并等待接线端授权命令到来。接线端设备接收到授权命令后开启打卡功能,操作接线端打卡,打卡成功后,接线端设备自动将FLASH存储器中打卡次数由2减为1。
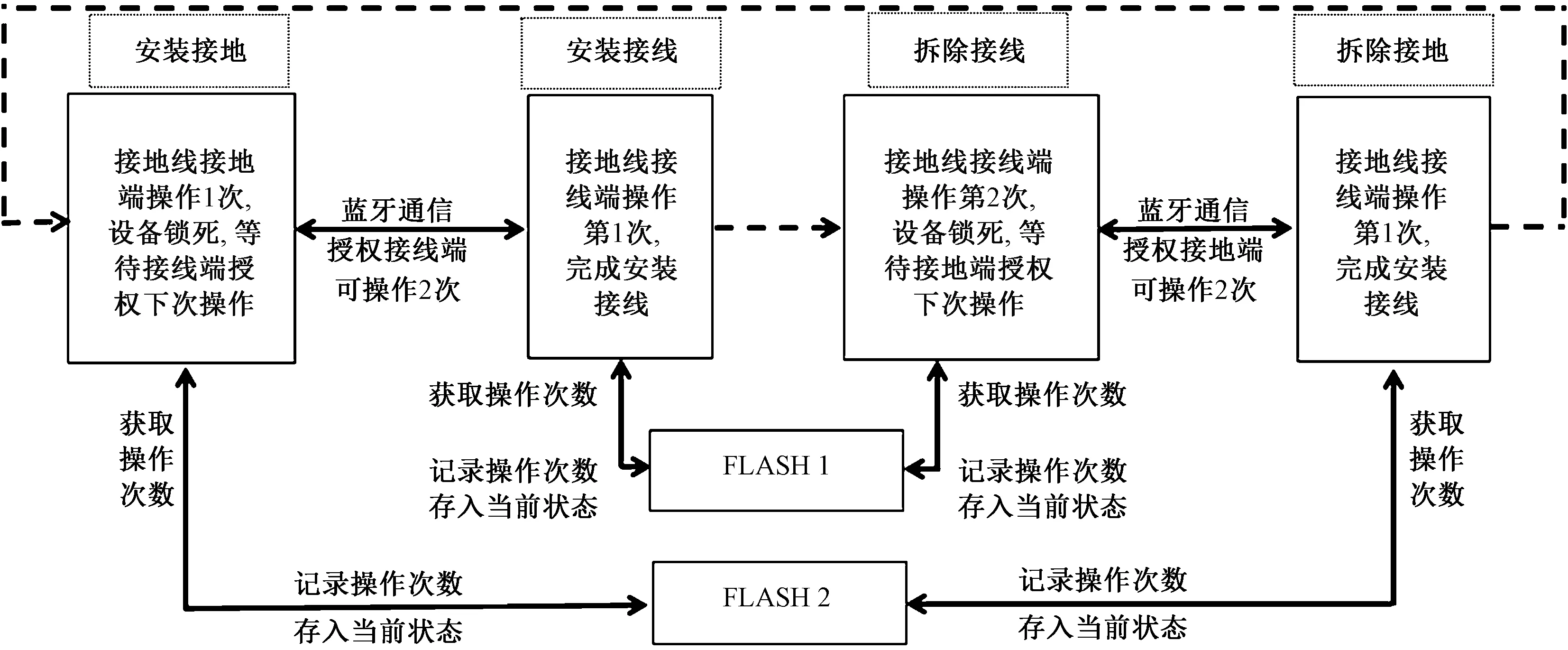
图9 接地线两端设备管理模式Fig.9 Device management mode at both ends of the ground wire
拆除接地线:接地线两端设备开机,设备存储了安装时的操作状态,接地端打卡设备不能操作(将等待接线端设备发过来的授权操作命令),操作接线端打卡(完成接线端拆除),打卡成功后接线端设备将通过蓝牙通信发出授权操作命令给接地端设备,然后自身进入锁死状态,设备FLASH存储器中可打卡次数由1减为0,并等待接地端授权命令到来。接地端设备接收到授权命令后开启打卡功能,操作接地端打卡(完成拆除接地端),打卡成功后,接地端设备自动将FLASH存储器中打卡次数由2减为1,并存储当前状态。
2 设备端装置的实现
2.1 硬件电路设计
设备端硬件电路包括控制器最小系统电路、GSM/GPS电路、指纹采集电路、蓝牙模块接口、声光输出电路和电源管理。
2.1.1 主控电路
以STM32F103RET6为控制核心,其拥有多达5 个硬件串口,可以容易实现各种外设的连接通信。串口1与指纹模块通信;串口2与GPS/GSM模块通信;串口3与蓝牙模块通信;串口4与语音模块通信;串口5作为调试口使用,外接PC串口助手。主控外围接口电路如图10所示。
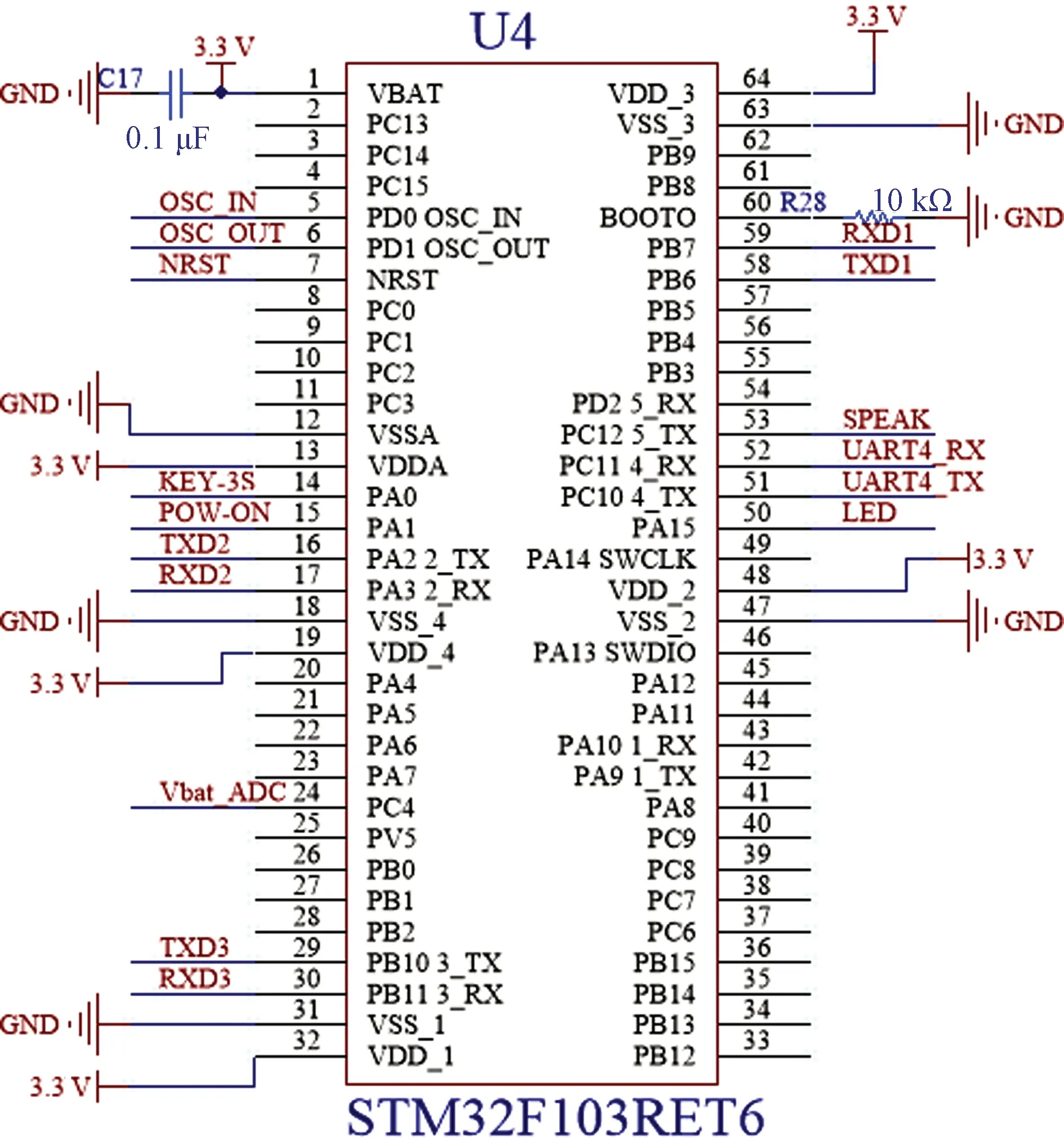
图10 主控外围接口电路Fig.10 Master peripheral interface circuit
2.1.2 GPS/GSM电路
SIM868模块实现GPS/GSM通信,该模块将全球移动通信(global system for mobile communication,GSM)、GPS和蓝牙三合一集成在一起,硬件占用面积更小,利于集成开发。通过串口发送AT(attention)指令即可完成通信。GSM/GPS电路如图11所示。
2.1.3 蓝牙电路
SIM868集成蓝牙不支持双向传递,只能接收数据,不能发送数据[22],设计中选用支持透传的独立蓝牙模块实现。蓝牙接口电路如图12所示。
2.1.4 电源管理
(1)DC-DC变换电路。采用MP1482开关稳压电源转换器实现4.0 V和3.3 V直流稳压电压输出,最大输出电流2.0 A。电源电路如图13所示。输出电压Vout计算公式为
(7)
式(7)中:Vout为输出电压;R12、R14为采样电阻。
当R12=39 kΩ,R14=15 kΩ时,计算输出电压为

(8)
当R12=49.9 kΩ,R14=14.7 kΩ时,计算输出电压为

(9)
(2)按键3 s开关机电路。开关按下,经过D2让MP1482被使能,3.3 V电源输出,STM32开始工作,经过连接KEY-3S的IO引脚开始计时,当时间达到3 s后,连接POW-ON的STM32的I/O(input/output)输出高电平,此时断开开关,MP1482的使能引脚继续被POW-ON的高电平使能,设备继续正常工作。当再次检测到KEY-3S高电平持续3 s,POW-ON变成低电平,电源关闭,设备关机。开关机电路如图14所示。
(3)电源切换电路。设备实现充电电池供电,可以通过外接充电器供电,可以由外接充电器给电池充电,用一个P沟道的场效应管(metal-oxide-semiconductor,MOS)做开关切换。电源切换电路如图15所示。注意要求二极管D8、D10具备较小的VF值。
2.2 设备控制软件实现
控制软件包含设备初始化、指纹数据获取、坐标数据获取、GPS通信、GSM通信、串口通信、蓝牙通信、接地线使用逻辑控制、声光输出程序和电源管理。
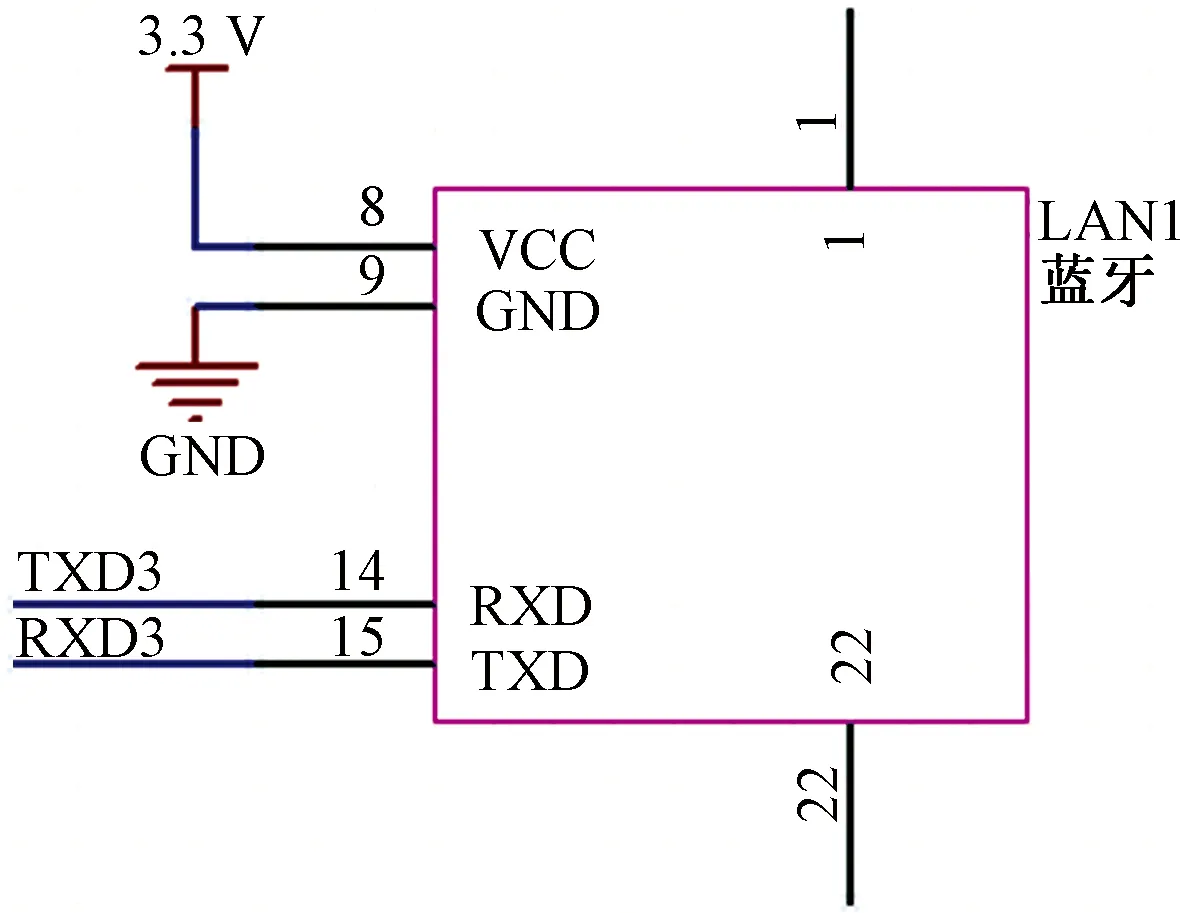
图12 蓝牙接口电路Fig.12 Bluetooth interface circuit
验电器设备实现流程如图16所示。开机之后,设备初始化指纹模块和SIM868模块,获取基站定位坐标值,然后启动GPS查找坐标,如果GPS在30 s内没有定位到坐标值,则使用基站定位坐标,当指纹数据获取成功时,定位坐标数据将和指纹数据同时上传服务器。
接地线设备实现流程:数据发送过程和验电器相同。不同功能是增加了蓝牙通信,建立两端设备互相授权操作,如图17所示。在这儿需要将使用次数记录到STM32的FLASH存储器当中,以保证每次没有按照操作流程操作完时,设备二次开机后能够记录上次的操作状态。
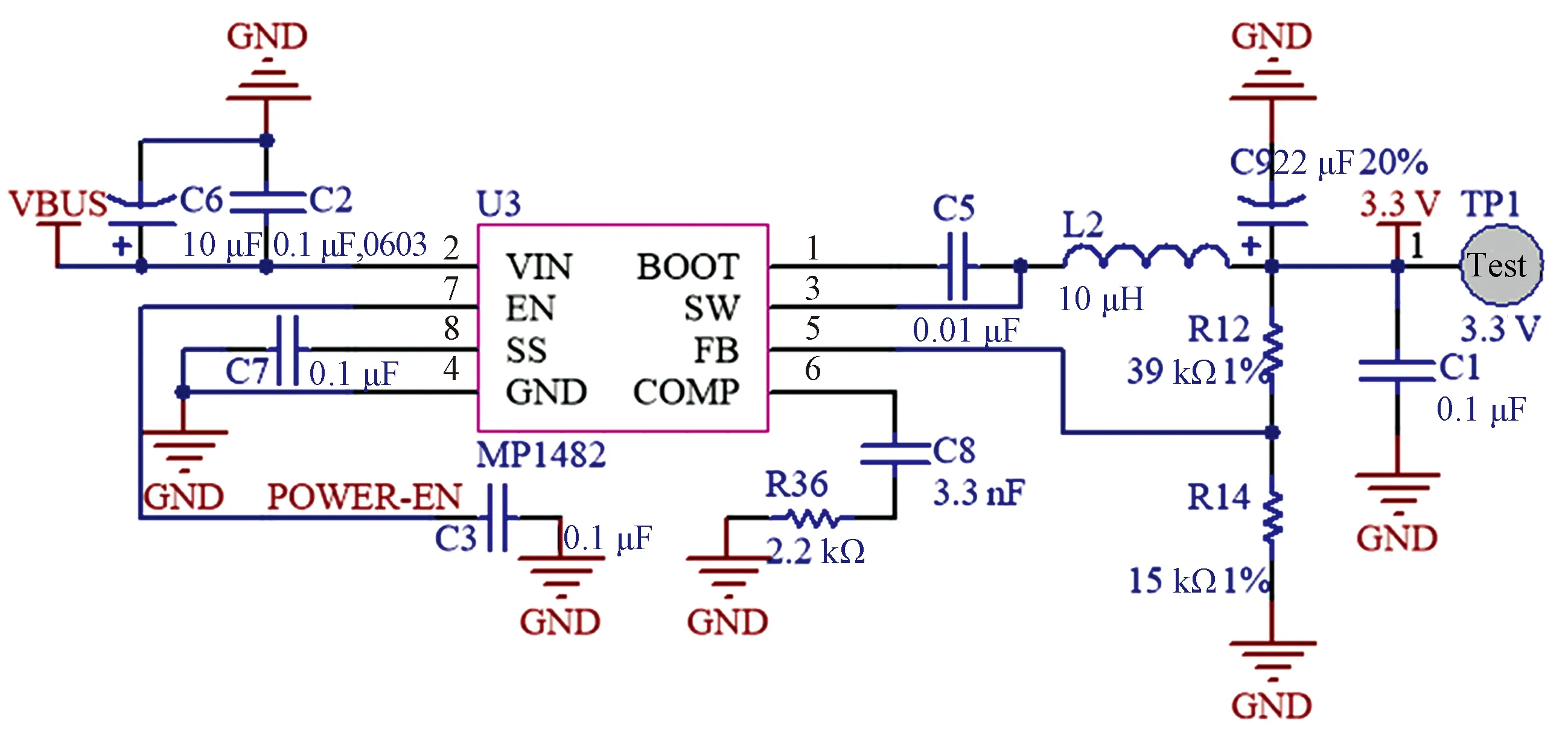
图13 电源电路Fig.13 Power circuit
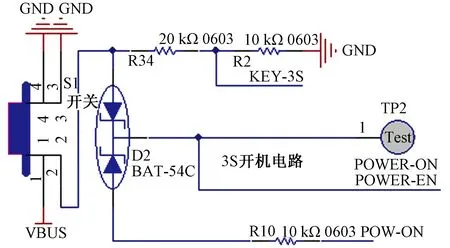
图14 开关机电路Fig.14 Switching circuit
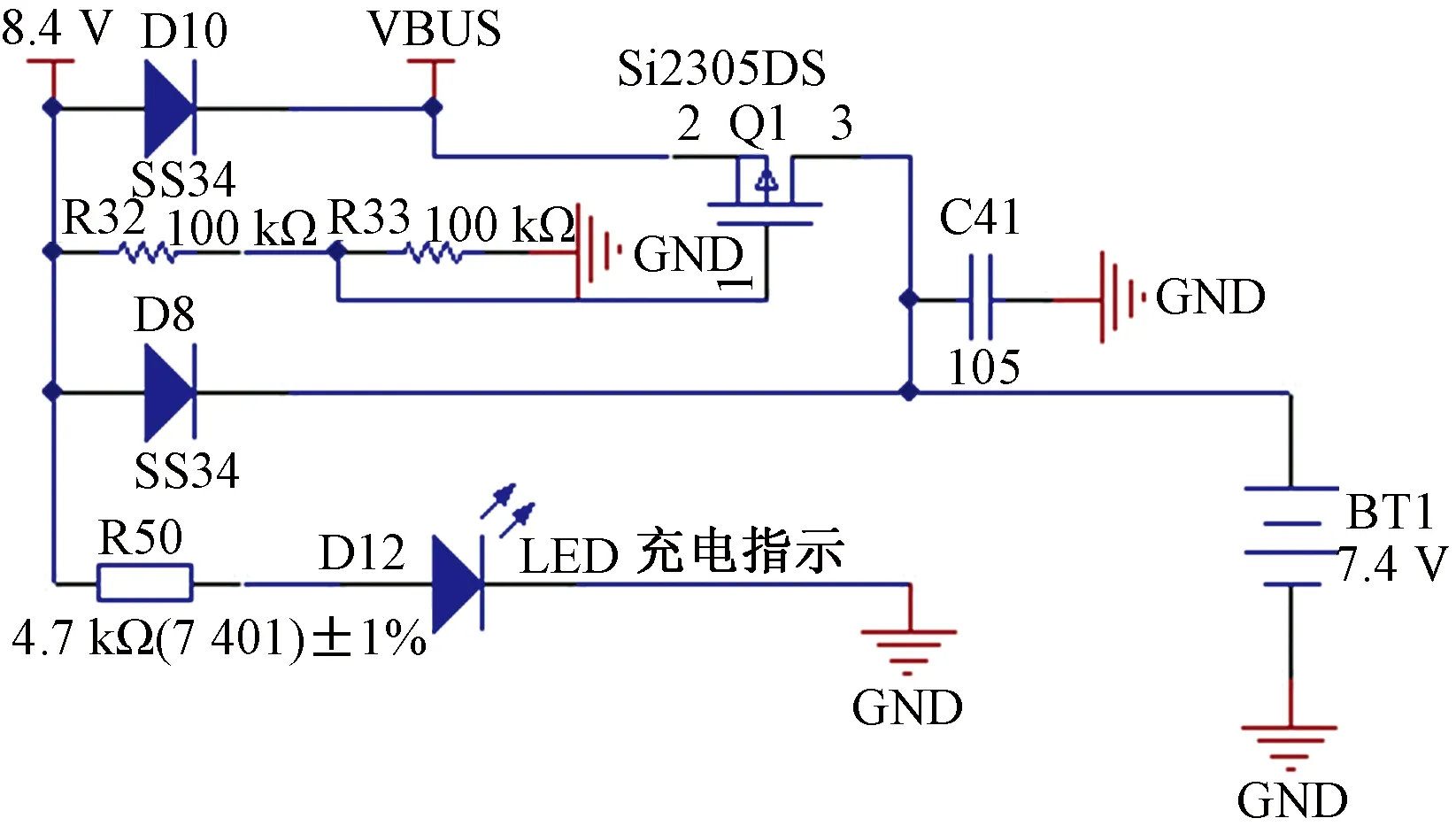
图15 电源切换电路Fig.15 Power switching circuit
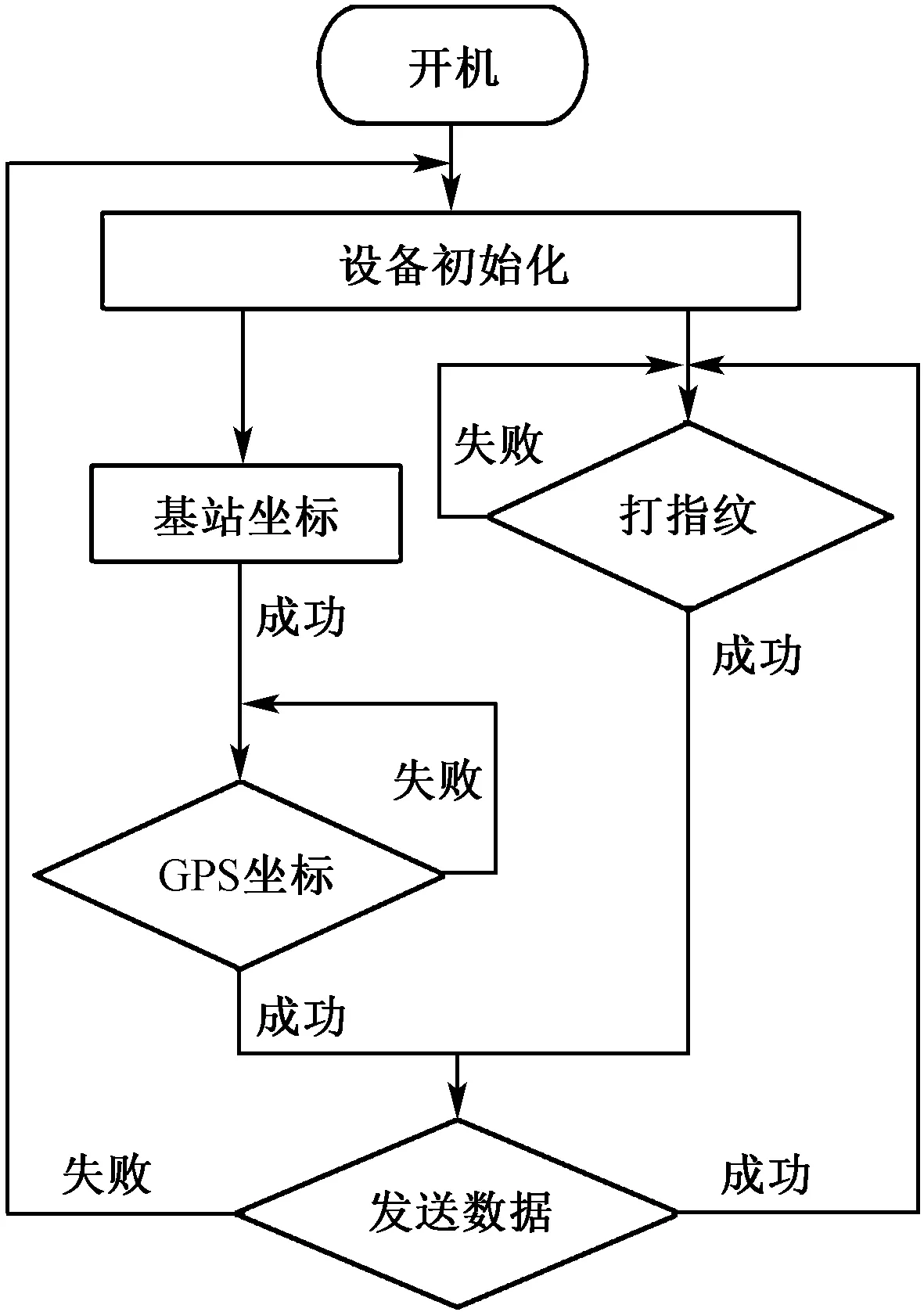
图16 验电器设备实现流程Fig.16 Realization process of electroscope equipment
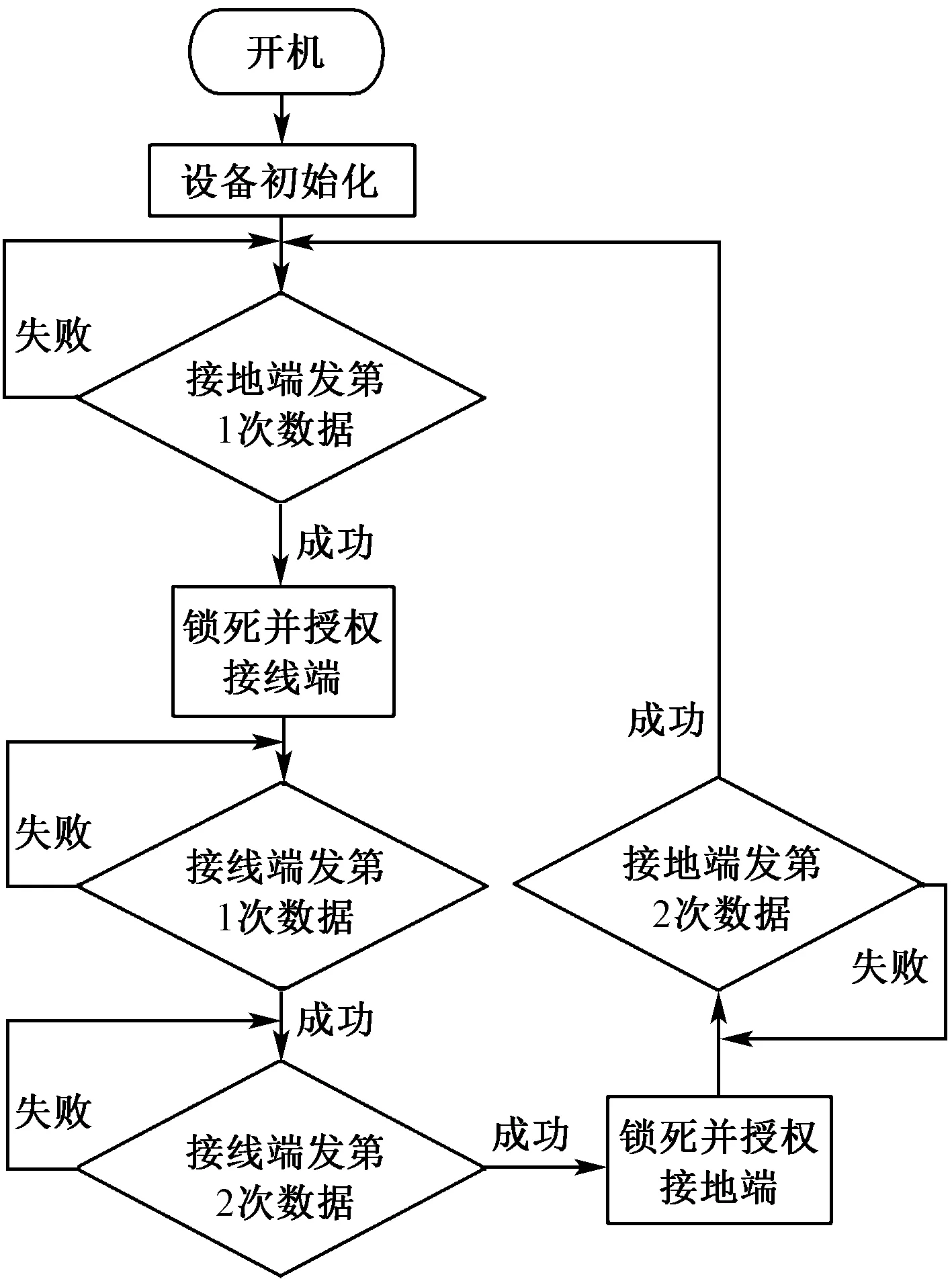
图17 接地线设备实现流程Fig.17 Grounding line equipment implementation process
2.3 设备控制板实物
电路板采用双面板工艺,板厚1 mm。GSM和GPRS天线采用50 Ω阻抗匹配,射频天线线宽为36.614 mil(1 mil=0.025 4 mm),且走线尽量短、包地。GPS天线采用有源天线实现。设计中注意SIM868模块的电源(4.0 V)走线,模块启动瞬间电流达到1.8 A,需要一定的走线宽度来保证大电流。主控制板实物如图18所示。
3 设备实物测试
3.1 实物安装
通过连接装置将设备固定在验电器杆上,固定在接地线两端位置,如图19所示。
3.2 设备应用场景
验电器和接地线上分别安装上管理设备。施工人员在使用操作时,在检修线路区间的两端,先安装接地线接地端,设备打卡;然后安装接地线接线端,设备打卡;再使用验电器验电,设备打卡。拆除时先拆除接地线接线端,再拆除接地线接地端,同时均要打卡操作。设备使用场景示意图如图20所示。
3.3 验电器管理设备测试
管理系统测试记录数据局部如图21所示。PC端后台能够实时获取施工人员对借出的验电器的使用记录,能够准确知道施工人员是否按照操作规范要求正确操作。记录数据包括使用人员(指纹打卡获取)、操作时间、操作地理位置等信息。

图19 验电器和接地线安装打卡设备示意Fig.19 Check the installation of the punching device on the electroscope and grounding wire
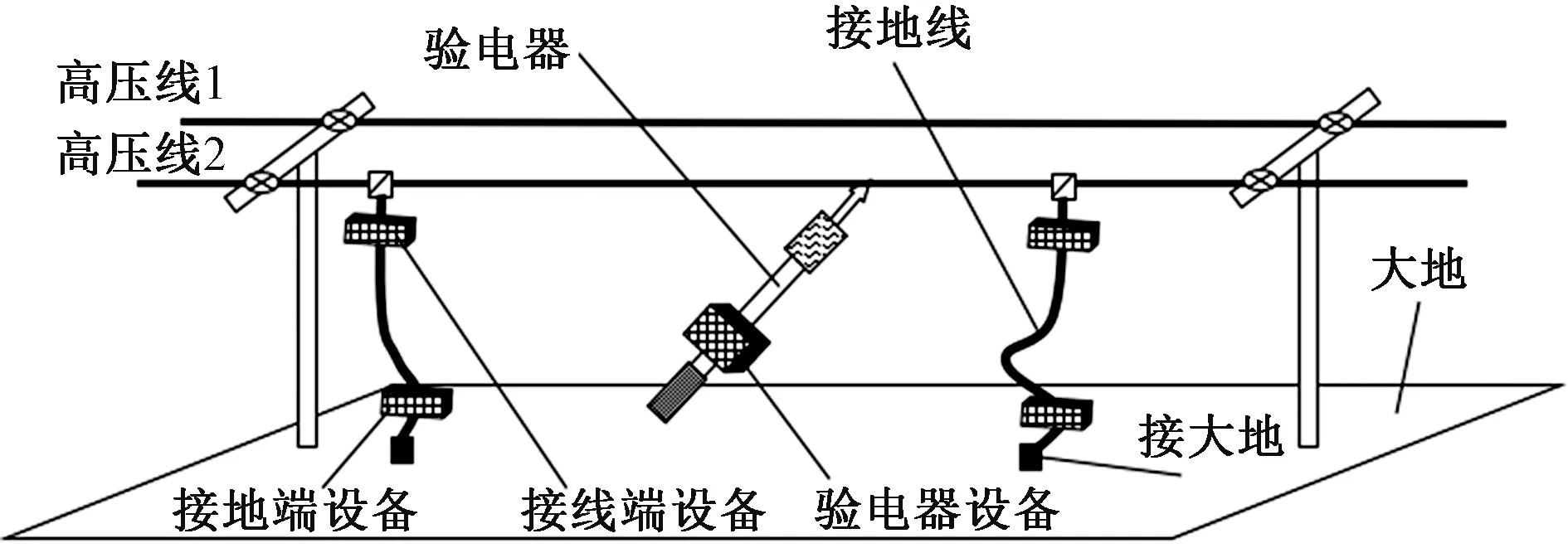
图20 设备使用场景示意图Fig.20 Schematic diagram of the device usage
点击GPS坐标栏对应时间的坐标数据,就可以打开高德地图,在地图上获取到位置信息。
3.4 接地线管理设备测试
PC端可以查询得到接地线借用、使用操作顺序记录等情况,判断接地线使用是否按照操作顺序进行使用。在设备端通过语音灯光等信息提示施工人员是否操作正确。PC端显示操作记录如图22所示。
4 结论
设备及系统的实际使用测试情况比较稳定可靠,从而证明有效的技术手段可以解决一些长久存在的问题。对电力行业而言,其应用影响深远。该系统的实现及应用,可以得到以下结论。
(1)能够对验电器、接地线设备与施工人员起到有效的管理监督,在提高了设备使用效率与安全系数的同时,降低了触电事故发生的概率,保护了电力检修人员的生命安全,减少了经济损失。
(2)对传统触电安全事故而言,通过可查询的历史操作记录,可以对落实事故原因、明确事故责任起到有效旁证。
(3)技术创新可以弥补传统方式的不足,对社会生活乃至生命安全起到非常大的帮助作用,甚至影响人类文明发展。

图21 验电器使用记录PC端显示Fig.21 Electroscope use record PC display

图22 接地线使用记录PC端显示Fig.22 Ground wire usage record PC display
猜你喜欢
电力安全技术(2022年9期)2022-11-09 06:10:12
工业设计(2022年7期)2022-08-12 13:18:58
电气技术与经济(2022年3期)2022-07-09 08:54:12
农村电气化(2021年12期)2021-12-23 05:51:44
电气工程学报(2021年3期)2021-11-19 09:23:30
湖南电力(2021年4期)2021-11-05 06:45:20
家庭影院技术(2018年10期)2018-11-02 05:35:26
家庭影院技术(2018年3期)2018-05-09 07:06:11
玩具世界(2017年8期)2017-02-06 03:01:38
山东工业技术(2016年15期)2016-12-01 05:31:22