
基于边缘计算的舰炮故障预测系统设计
2021-01-07 04:55谭艾迪
计算机测量与控制 2020年12期
闫 戈,吴 婷,杨 诚,汪 浩,谭艾迪
(中国船舶工业综合技术经济研究院,北京 100081)
0 引言
舰炮通常分为电气和火炮系统两部分,是一种集光机电液于一体的复杂武器,须在短时间内连续、不间断地高速射击,对可靠性要求高。目前对舰炮系统的保障方式仍以“事后维修”和“定期维修”为主,不能实时判断舰炮系统的工作状态,且少量的监测系统及也是以状态监测及故障诊断为目的[1-3],无法准确预测故障发生时间,难以保证舰炮执行训练或者任务时的可靠性和安全性,且设备的过度维保造成资源的浪费,也不能避免突发性故障[4]。随着战场对舰炮性能需求的提高,舰炮性能退化和故障导致的风险在加大的同时,其维修成本也大幅提高,如何在节约维修保障成本的同时,提高舰炮系统的能力成为迫切解决的问题[5]。
1 故障预测技术和边缘计算
1.1 故障预测技术
故障预测技术是在故障诊断的基础上发展得到的一种更为精准的维护保障方式。故障预测的最大价值在于剩余生命的预测,技术人员利用设备的设计数据、状态数据等信息,采用合适的方法,预测对象在未来的一段时间内何时发生故障以及发生什么故障,提前制定维护保障方案,实现基于状态的维护,可以有效地保障设备的工作效率。
故障预测技术的出现为提高舰炮武器的可靠性和维修保障能力提供了一种新的手段。故障预测技术在舰炮系统维护窗口期内选择最合适的维护策略和维修计划,在统筹全系统维护内容的基础上,制定全局最优的维护方案,节省人力物力,保障系统的工作能力,目前在船舶主推进系统[6]、柴油机[7]、民用飞机[8]、航空电子及装甲车辆等方向[9-10]已经取得了较好的使用效果。
1.2 边缘计算
传统的故障诊断系统一般都是将数据上传至上位机进行统一处理。随着接入监测设备数量的增加,系统对数据传输带宽和处理的实时性均提出了更高的要求。边缘计算作为新兴技术,可以很好地解决传输数据量大、网络带宽要求高的问题[11-12]。
边缘计算核心在于可将计算、存储、网络和应用服务前移至靠近物或者数据源的一侧。边缘计算可以有效地降低网络带宽和数据中心压力、提高应用服务的实时响应能力、增强数据安全性[13-14]。
边缘计算主要由设备层、边缘主机层和终端层组成,其技术架构[15]如图1所示,功能分别如下:
1)设备层,包括各种需要监测的设备、系统、部件和其他监测系统,主要是监测对象,并对其进行信号数据得收集;
2)边缘主机层,对收集的各类信号进行处理,该层基本完成必须的数据处理工作,仅将数据结果上传至终端层;
3)终端层,主要用于查看边缘主机层数据处理结果,此外,当需要查看某一设备某一时段的工作数据时,可以通过控制软件将阶段数据上传,进行进一步分析,有效地降低了数据量的传输。
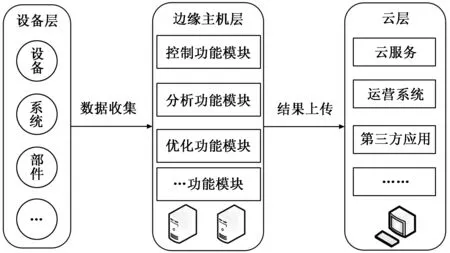
图1 边缘计算技术参考架构
本文针对舰炮基于状态的维护保障需求,设计了一种舰炮故障预测系统,考虑舰炮系统及其搭载的舰船平台特殊使用环境,引入了边缘计算技术架构,将计算和存储资源前移到数据采集前端,在平台端实时进行预测和健康状态评估,实现自主式维护保障。
2 系统架构设计
舰炮故障预测系统从功能上分为三部分,包括基于windows平台的人机交互界面,用于故障预测系统的管理与控制;基于Linux RT系统的数据流管理软件,用于采样数据流的处理分析;基于传感器及机内自检系统的数据感知系统,用于舰炮工作状态数据的收集。

图2 舰炮故障预测系统架构图
根据功能需求,舰炮故障预测系统架构设计方案如图2所示,系统分为三层子系统,包括数据感知子系统、数据处理子系统以及上位机子系统。数据感知子系统通过安装振动、压力、温度传感器以及接入机内自检系统的电压、电流、温度信号实现舰炮的状态参数感知,并传送至数据处理子系统进行分析处理;数据处理子系统主要用于信号数据的特征提取、状态识别(健康评估)、故障预测、数据处理结果的上传、采样配置的下载、信号数据的储存等,是舰炮故障预测系统的核心子系统。系统采集的状态数据在数据处理子系统完成故障预测计算故障,并将预测结果上传至上位机;上位机主要用于系统采样参数的配置、状态数据及预测结果的显示、数据管理和历史数据分析等。
3 系统硬件设计
3.1 数据感知子系统
根据常见的故障类型以及故障模式,考虑机内自检系统现有状态参数无法足够表征关键部件的退化状态,在不影响舰炮结构和性能的基础上,新增振动、温度、压力传感器抓取部件的状态信息,并对传感器布局进行优化设计,实现利用最少数量的传感器获取舰炮系统的全面状态信息。
数据感知子系统,如图1,包括数据采集模块以及总线数据获取模块,用于对舰炮关键系统的信号数据进行采集,并将采集的实时信号数据传输至数据处理子系统的数据采集处理平台。关键系统包括自动机、火炮控制柜、随动电机、随动变频器、电源机柜、炮床;数据采集模块包括振动、温度、压力传感器,分别用于采集舰炮炮架的振动信号、随动变频器的温度信号以及自动机的压力信号;总线数据获取模块用于获取舰炮系统火炮控制柜的电压电流信号、随动电机的温度信号以及电源机柜的电压信号。
3.2 数据处理子系统
数据处理子系统是舰炮故障预测系统的核心组成,包括CompactRIO集成式控制器、数据存储模块、电源模块、数据输入模块。
数据输入模块用于解析BIT总线信号数据,并对数据采集模块采集的信号数据进行异常点剔除、降噪滤波、时间对准处理等;数据存储模块用于存储采集的信号和特征数据;电源模块为控制器提供电源;控制器负责数据的特征提取、状态识别、故障预测、预测结果的上传、配置参数的下载等,各模块集成为CompactRIO数据采集平台,安装于加固机箱内,如图3所示。舰炮故障预测系统采用Labview作为上位机软件及数据采集硬件平台的控制程序开发环境。
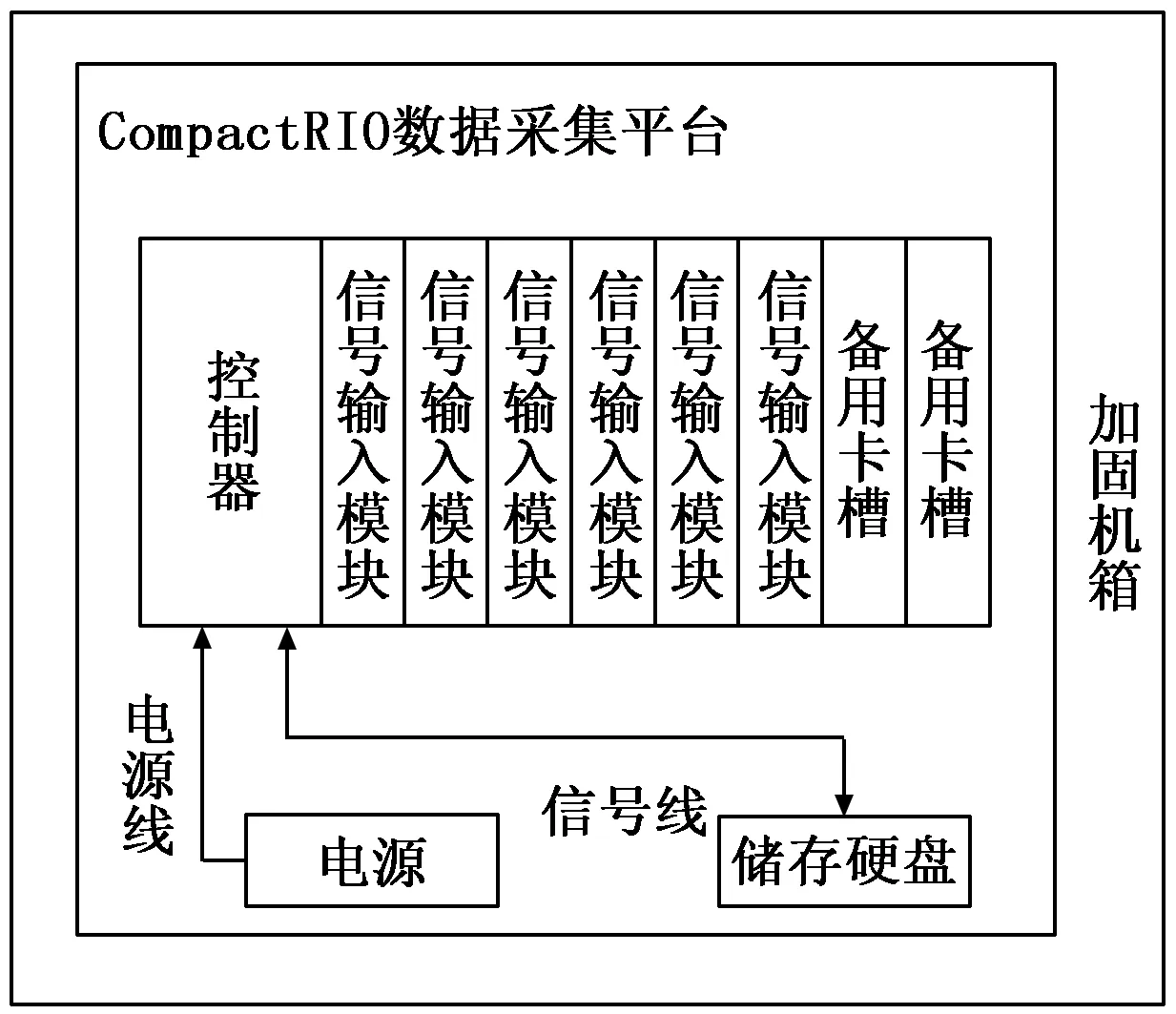
图3 信号处理分析子系统硬件平台
其中,CompactRIO集成式控制器主要功能包括装载数据输入及通信模块;利用机箱上的FPGA核心实现基于硬件的时序控制(精确定时、严格触发等)、数据采集、信号处理、结果输出操作;运行应用程序,连接外围设备、记录数据;将数据经信号线存入储存硬盘中;数据处理结果的上传及实时显示;参数配置、系统调试等。信号输入模块主要功能包括利用模拟输入通道采集传感器信号;利用同步触发机制实现数据的同步采集等。
CompactRIO集成式控制器负责特征提取、状态识别、故障预测等数据处理内容以及下载上位机指令和上传数据处理结果等,是数据采集平台的核心组成部件,其功能单元组成如图4所示,包括:1)功能配置单元,用于接收上位机的控制指令,为硬件系统设置系统采样通道、采样率、模型关键参数等;2)特征提取单元,进行数据时域、频域、时频域的分析处理,完成特征提取,并构建特征向量,用于状态识别单元和故障预测单元的输入;3)状态识别(健康评估)单元,利用舰炮数据构建状态识别模型,实现舰炮系统关键部件的实时运行状态识别;4)故障预测单元,利用舰炮数据构建故障预测模型,计算得到实时预测结果,并结合历史数据和实时运行状态数据,对算法模型训练、迭代和管理,不断提高模型适应性,确保故障预测结果的准确率;5)结果输出单元,用于将数据结果上传至上位机进行显示及管理。CompactRIO数据采集平台具备体积小、稳定性高、宽温、可配置性强的特点,可以满足不同工作任务下的数据采集需求。

图4 集成式控制器功能单元组成
3.3 上位机
考虑到舰炮工作环境恶劣、便于数据管理以及结果观测性要求高的特点,舰炮故障预测系统选用高配置平板电脑作为上位机。为满足实际的状态监测和故障预测需求,共设置4个模块,分别为:
1)参数配置模块,参数配置模块包括通道配置和信号采集模块采样率的配置,可以满足不同数据采集任务下,不同通道数量和不同采样率的组合需求。
2)数据管理模块,将下位机储存在硬盘里的数据上传至上位机电脑中,便于后期的分析。
3)数据显示模块,配合数据管理模块,对同步到上位机的数据进行观测,在展示波形的同时还能够对各个通道采集信号进行简单的数据统计。方便用户实时监测采样信号,及时发现待测信号的异常状态,在必要时及时调整测试任务。
4)数据分析模块,配合数据管理模块,历史数据分析模块对同步到上位机的数据进行运行趋势、状态识别、故障预测等数据分析。
系统采用LabVIEW软件作为开发工具,完成了舰炮故障预测系统的开发,安装于上位机平板电脑,通过触摸屏对系统进行操作控制,实现舰炮运行状态信号的实时在线监测、参数显示、数据管理以及历史数据分析等。
4 软件平台设计
4.1 系统软件结构设计
软件选用NI公司的Labview软件,以NI硬件结构体系为基础,结合模块化、多线程的软件设计思想进行开发,使其具备数据采集、存储、网络通信、实时数据显示、历史数据查看、数据管理及任务配置的功能。对于数据的任务配置,测试人员可以根据需求,在上位机上灵活的进行采集通道的选择和采样率的设置。对于数据存储,采用文件的形式进行存储,存储的文件格式支持.dat、.txt等多种文件格式,软件平台结构如图5所示。

图5 软件平台结构
4.2 系统数据处理流程
本文基于边缘计算技术架构,将数据处理前移至设备端即靠近数据源头,边缘主机层负责数据处理工作,日常工作时,上位机只负责数据处理结果的查看。当对历史数据有分析需要时,通过控制指令将数据库中的数据上传至上位机,并进行进一步的数据处理分析。
首先系统的数据采集模块和总线数据获取模块负责舰炮关键系统的数据收集,完成数据的第一次预处理如AD转换等;将数据输送至CompactRIO数据采集平台进行数据的第二次预处理如野点剔除和归一化处理等,完成预处理后数据进行特征提取及储存,一方面将特征提取数据处理结果上传至上位机显示,另一方面结合历史数据构建特征矩阵,用于训练状态识别、故障诊断和故障莫测模型,用于历史数据的分析,系统数据处理流程如图6所示。
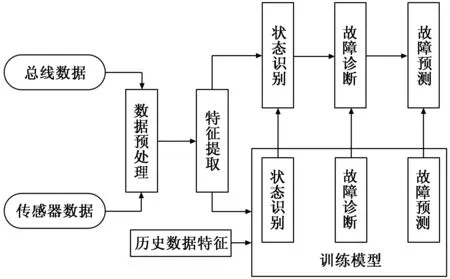
图6 系统数据处理流程
4.3 系统界面设计
软件界面如图7~10所示。系统启动后,登录客户端自动接入参数配置界面,包括界面选择栏、控制按钮栏、通道栏、数据曲线显示栏、通道自检状态栏等。其中,界面选择栏用于选择用户配置、数据显示、数据管理、历史数据分析界面;控制按钮栏实现程序开始运行、停止等功能。通道栏用于显示波形的通道;数据曲线显示栏显示当前选中通道的数据曲线。
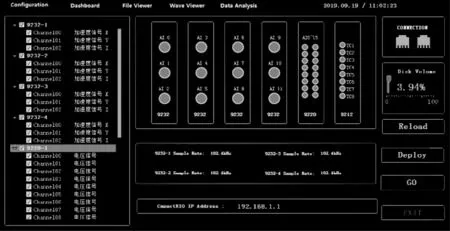
图7 系统配置界面

图8 数据显示界面
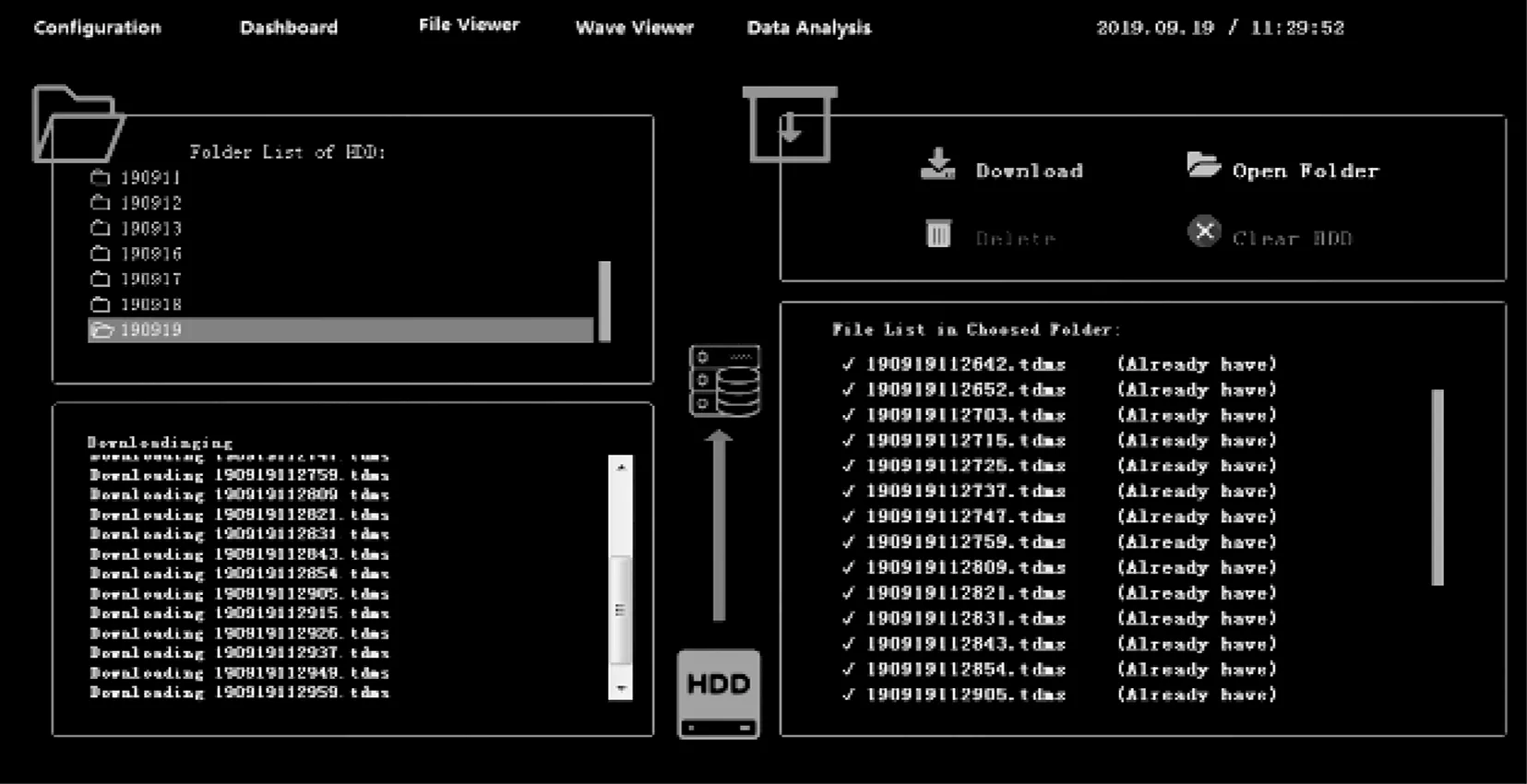
图9 数据管理界面
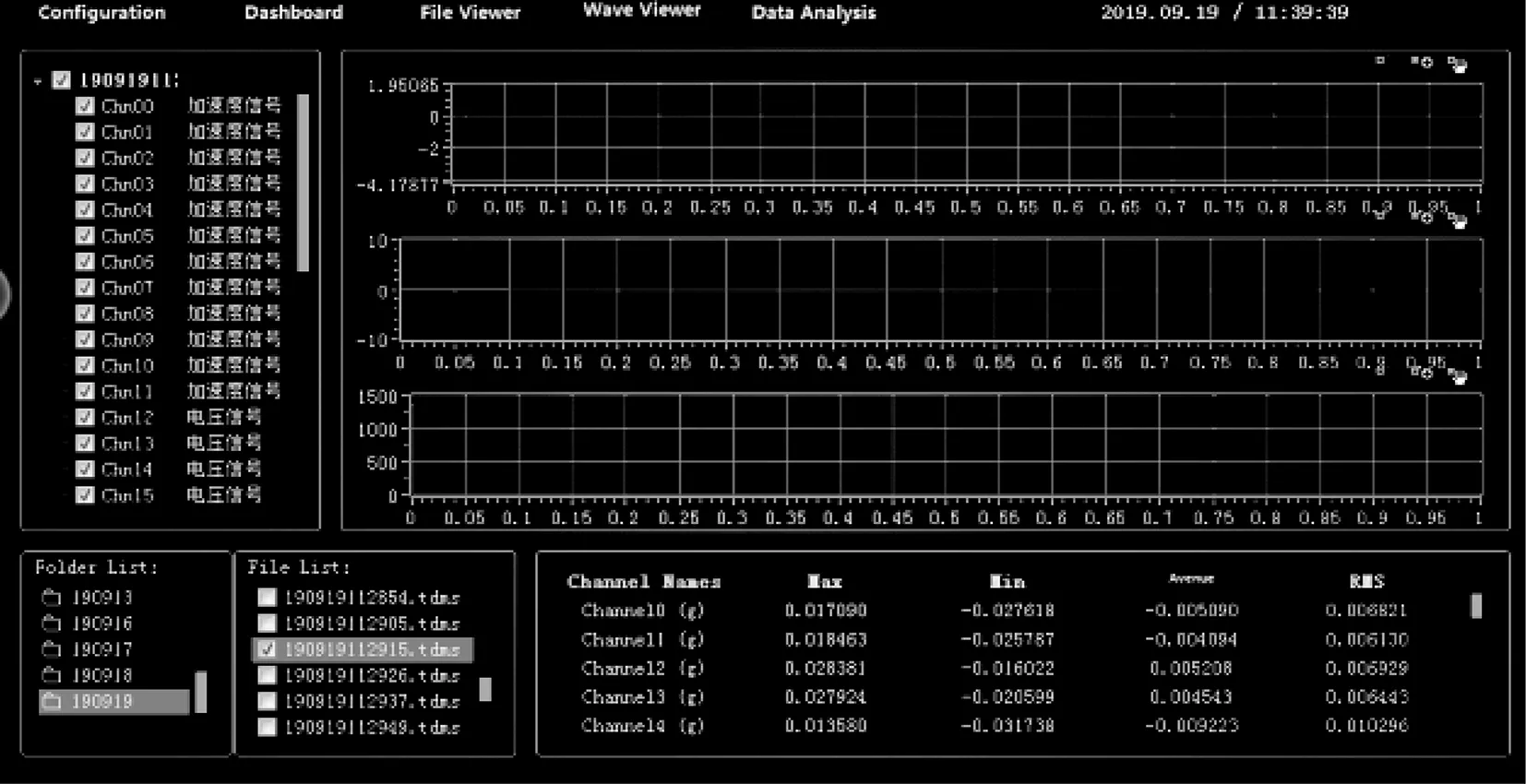
图10 数据分析界面
5 结束语
本文提出并设计了一种基于边缘计算的舰炮故障预测系统,在传统监测与故障诊断的基础上同时引入了故障预测技术和边缘计算技术。故障预测技术可以实现舰炮关键系统的运行状态分析,准确预测故障发生时间,提前规划维修任务;系统引入的边缘计算技术架构,将舰炮系统信号数据处理工作下移至下位机,上位机负责数据处理结果的显示及管理,便于用户的观测,也更有利于现场的实施。设计的舰炮故障预测系统较传统的状态监测系统优势明显,详细对比见表1。
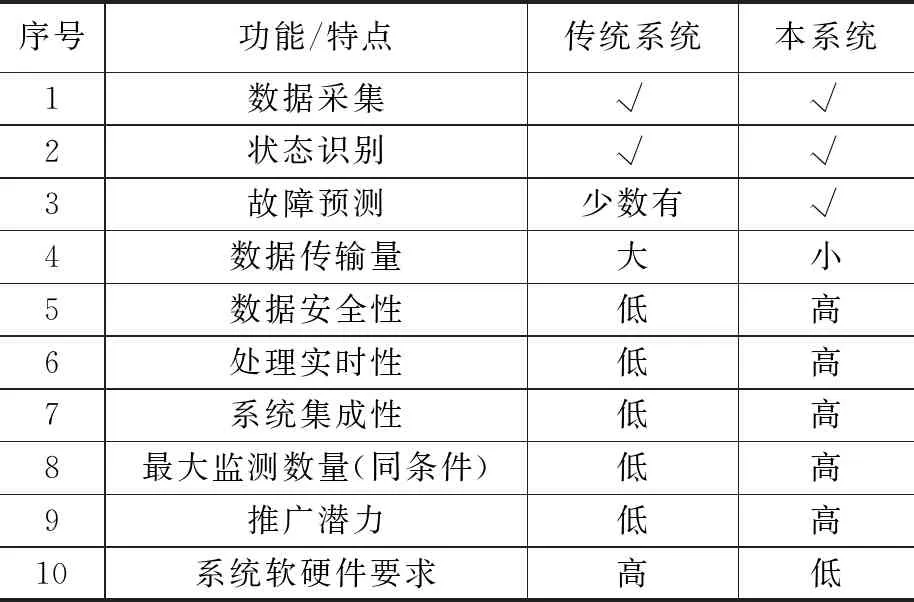
表1 设计系统和传统系统优势对比
基于边缘计算的舰炮故障预测系统通过采集舰炮系统的温度、振动、压力、电压、电流信号,完成舰炮状态数据的采集与储存,不断积累有效的运行数据,并实现舰炮关键系统的运行趋势监测、状态识别、故障预测,可以提前规划维护保障方案,保证舰炮执行训练或任务时的可靠性和安全性,提高舰炮系统的工作效能,同时可以对备品备件优化,降低维护保障成本。通过边缘计算技术架构,可以有效地提高了数据处理的实时性、降低了数据传输量以及系统软硬件的要求,更便于与其他系统的集成。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
军事文摘(2021年16期)2021-11-05
军事文摘·科学少年(2021年8期)2021-09-10
建材发展导向(2021年12期)2021-07-22
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
