
变质心技术发展与应用
2021-01-06 12:48周敏周凤岐周军郭建国
航空兵器 2021年6期
周敏 周凤岐 周军 郭建国

摘 要:变质心技术利用飞行器内部质量块移动改变质心位置, 无气动舵、 直接力等传统控制方式热烧蚀、 舵面颤振、 燃料消耗问题, 控制效率高, 有利于保持机体良好气动外形。 本文基于变质心控制内涵, 分类总结了变质心实现与配置的两种形式及其特点, 详细梳理了滚转控制、 配平控制和复合控制三种变质心控制模式的研究进展。 最后, 通过分析变质心技术面临的复杂多体动力学建模、 强耦合强非线性控制、 高动态高性能执行机构设计与研制等关键难点问题, 展望变质心技术应用新场景, 为未来变质心技术研究指明了方向。
关键词: 变质心; 总体配置; 滚转控制; 配平控制; 复合控制; 飞行器控制
中图分类号: TJ765; V249.1 文献标识码: A 文章编号: 1673-5048(2021)06-0007-07
0 引 言
变质心是指通过主动改变飞行器质心位置, 产生期望控制效应的一种新概念控制技术。 该技术最早是由美俄科学家提出并发展起来的。 而美国的变质心技术研究起步最早、 最成熟。 1975年, 美国完成了机动弹头MK-500的飞行试验, 该弹头就采用了变质心技术, 通过移动弹头内部电子装置实现弹头质心位置变化[1], 但其他研究细节一直处于高度保密状态, 直到1996年, 公开文献中才首次出现与MK-500机动弹头的变质心应用方案相近的研究内容[2]。
俄罗斯的变质心技术发展十分迅速, 目前也已实现工程应用。 作为首个能够完全在俄罗斯本国境内研制和生产的战略弹道导弹, 白杨-M就采用了变质心技术。 从1993年进入工程研制, 到1997年完成飞行试验, 白杨-M用时不到5年就进入了俄罗斯战略核力量作战序列, 成为其核威慑力量的中流砥柱[3]。
从美俄的变质心技术应用现状和相关技术细节的保密程度不难窥见, 变质心技术研究对于提升机动弹头、 弹道导弹等武器性能具有重要意义。 鉴于此, 西北工业大学周凤岐教授于1993年在国内最早提出并开展变质心技术研究, 其团队针对变质心飞行器总体、 制导控制、 仿真试验以及伺服机构等方面内容开展了系统性的深入研究[4-9], 引领并推动了国内变质心技术从概念研究到工程应用的全过程。 另外, 哈尔滨工业大学、 北京理工大学等单位的学者也对该技术进行了深入研究[10-12]。
本文在阐述变质心控制内涵的基础上, 对变质心实现与配置形式进行了分类介绍, 总结了变质心技术应用于飞行器姿态控制的三种模式及其研究现状, 对未来变质心技术发展面临的关键难点问题和主要应用场景进行了展望。
1 变质心控制内涵
飞行器变质心最直接的效应是改变系统质量分布, 由此导致系统质心位置变化和惯性主轴偏移。 基于此, 变质心技术可用于实现三种不同的控制效应, 分别是用于主动调节飞行器质心和压心距离, 调控系统操控性能; 用于主动改变飞行器惯量特性, 控制飞行器的角运动规律; 用于调节飞行器所受合外力的作用力臂大小, 产生可变力矩作用实现姿态控制。 其中, 变质心姿态控制效应利用飞行器质量特性主动变化所产生的控制力矩, 因此也被称为质量矩控制。
相比于常见的气动舵、 摆动喷管、 直接力等飞行器姿态控制手段, 变质心姿态控制有其优越性:
(1) 不存在气动舵面、 直接力喷管等外露执行机构的热烧蚀问题;
(2) 不存在直接力喷流干扰、 气动舵面颤振等不确定干扰作用;
(3) 变质心机构完全置于飞行器内部, 有利于保持飞行器良好气动外形, 获得更好的气动特性;
(4) 利用整个飞行器机体为控制作动面, 费效比低, 控制效率高。
2 变质心实现与配置
变质心控制按照控制的姿态运动通道数可分为一维变质心控制、 二维变质心控制和三维变质心控制。 一维变质心控制实现飞行器俯仰、 偏航、 滚转任一通道的姿态控制; 二维变质心控制实现俯仰、 偏航、 滚转三通道中任意两个通道的姿态控制; 三维变质心控制则需要完成飞行器全部三通道姿态控制。 一维/二维/三维变质心控制实现以变质心机构配置为基础, 依赖于飞行器内部可动质量块的安装与运动方式, 可分为两类: 变质心直角坐标配置和变质心极坐标配置。
2.1 变质心直角坐标配置
周 敏, 等: 变质心技术发展与应用
变质心直角坐标配置, 顾名思义就是在直角坐标系框架内实现飞行器质心变化的配置方式。 图1为一种典型的变质心直角坐标配置: 三个可动质量块分别在三个直线导轨上移动, 三个直线导轨相互垂直且分别与飞行器本体坐标系的三个坐标轴平行。 此时, 三个质量块移动能够实現飞行器系统总质心在本体坐标系三个轴向的位置分量。
定义可动质量块均处于位移零位时的系统总质心位置为系统质心零位; 记飞行器本体坐标系三个坐标轴的单位矢量分别为i, j, k。 当变质心机构作用即可动质量块移动时, 记系统瞬时质心相对于系统质心零位的位置矢量为r1=x1i+y1 j+z1k, 假设此时飞行器受到的合外力矢量为F=Fxi+Fy j+Fzk, 合外力作用点相对于系统质心零位的位置矢量为r2=x2i+y2 j+z2k。 此时, 变质心机构作用下飞行器所受合外力矩变化量为
MC=(r2-r1)×F=(yFz-zFy)i+(zFx-xFz)j+(xFy-yFx)k (1)
其中:
x=x2-x1; y=y2-y1; z=z2-z1。
显然, 三个可动质量块的独立运动能够改变飞行器滚转、 偏航、 俯仰通道所受外力矩大小, 实现三通道姿态控制; 但各通道所受力矩分量由两个方向的可动质量块运动共同决定, 即飞行器三通道姿态控制存在通道间交叉耦合特性。
以滚转通道的力矩分量(yFz-zFy)为例。 当飞行器受侧向力Fz、 法向力Fy作用时, 沿j向和k向的质心位置变化量y和z将共同决定飞行器受到的滚转力矩大小, j向质心位置变化量y同时也影响俯仰力矩大小, 飞行器的滚转姿态运动与俯仰姿态运动耦合; 同理, 考虑k向质心位置变化量z影响时, 滚转姿态运动与偏航姿态运动耦合; 考虑i向质心位置变化量x影响时, 偏航姿态运动与俯仰姿态运动耦合。
如果飞行器采用BTT (Bank-To-Turn)飞行模式, 其理想飞行状态下的侧向运动为零, 受到的侧向力分量近似满足Fz≈0, 此时式(1)简化为
MC=-zFyi+zFx j+(xFy-yFx)k(2)
显然, 变质心控制下的BTT飞行器受到的滚转力矩和偏航力矩均由系统k向质心位置变化量决定。 可见, 变质心控制应用于BTT飞行器时存在欠驱动特性, 可以通过设计合理的通道间协同策略确定k向移动质量块运动, 实现滚转姿态控制和偏航姿态稳定; 也可以通过引入其他控制手段與变质心复合, 实现飞行器的三通道姿态控制。 如给BTT飞行器配置方向舵实现偏航稳定, k向移动质量块在较大法向力作用下具有较强滚转姿态控制能力, 沿i向和j向移动的可动质量块则共同完成俯仰通道的姿态控制。 可见, 三个可动质量块的变质心机构不一定用于实现飞行器三通道姿态控制, 即如图1所示的直角坐标变质心机构不一定是三维变质心机构。
需要特别说明的是: 变质心直角坐标配置中, 质量块相对于飞行器本体只有平动而无转动运动。
2.2 变质心极坐标配置
变质心极坐标配置, 顾名思义就是在极坐标系框架内实现飞行器质心变化的配置方式。 在此, 给出两种典型的变质心极坐标配置, 如图2所示。
变质心平面极坐标配置就是在平面极坐标框架内实现系统质心变化的可动质量块配置形式。 如图2(a)所示, 单质量块沿直线导轨运动, 通过将直线导轨一端与飞行器本体铰接, 实现直线导轨在以飞行器本体坐标系i轴为法向量的平面内转动。 在该配置中, 通过改变质量块相对于铰接点的径向距离r和直线导轨旋转位置象限角θ, 即改变两个自由变量组合(r,θ), 实现飞行器系统质心在i平面内变化, 即j向和k向两个方向上的主动变化。
若将图2(a)极坐标配置中导轨的平面铰接更换为球形铰接, 就可以得到如图2(b)所示的单质量块空间极坐标配置。 在该配置中, 通过改变可动质量块相对于铰接点的距离以及直线导轨在三维空间中的指向角度θ和, 即改变三个自由变量组合(r, θ, ), 可实现飞行器系统质心在三维空间中的主动变化。
若将图2中的导轨+滑块配置替换为双滑块, 也可以实现如图3所示的变质心平面极坐标配置: 两个质量块能够沿着以飞行器本体坐标系i轴为法向量的圆环形导轨运动。 在该配置中, 通过改变两个质量块的位置象限角θ1和θ2大小, 即改变两个自由变量组合(θ1,θ2), 实现飞行器系统质心在i平面内变化, 即j向和k向两个方向上的主动变化。 在此基础上, 若图3所示平面极坐标配置中的环形导轨还能够在i向前后移动, 就可以进一步实现飞行器系统质心在三维空间中的主动变化。 与直角坐标配置相比, 实现变质心极坐标配置的可动质量块运动更加复杂, 相对于飞行器本体做平动与转动运动的叠加。 因此, 极坐标配置下的变质心飞行器动力学更加复杂。
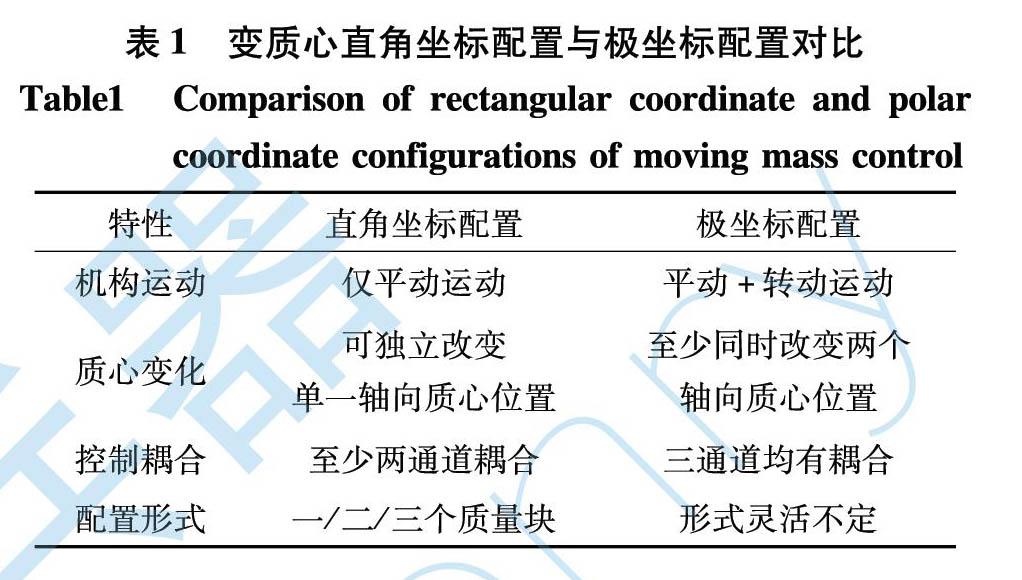
配置可动质量块以实现变质心控制并没有固定形式, 而是需要综合飞行器总体布局约束、 飞行控制需求和工程应用实际限制等多方面因素进行取舍和平衡, 完成优化设计。 总结变质心直角坐标配置和极坐标配置区别如表1所示。
3 变质心控制模式
变质心技术应用于飞行器姿态控制时主要实现变质心滚转控制MMRC (Moving Mass Roll Control)、 变质心配平控制MMTC (Moving Mass Trim Control)和变质心复合控制MMPC (Moving Mass Compound Control)三种模式。
3.1 滚转控制
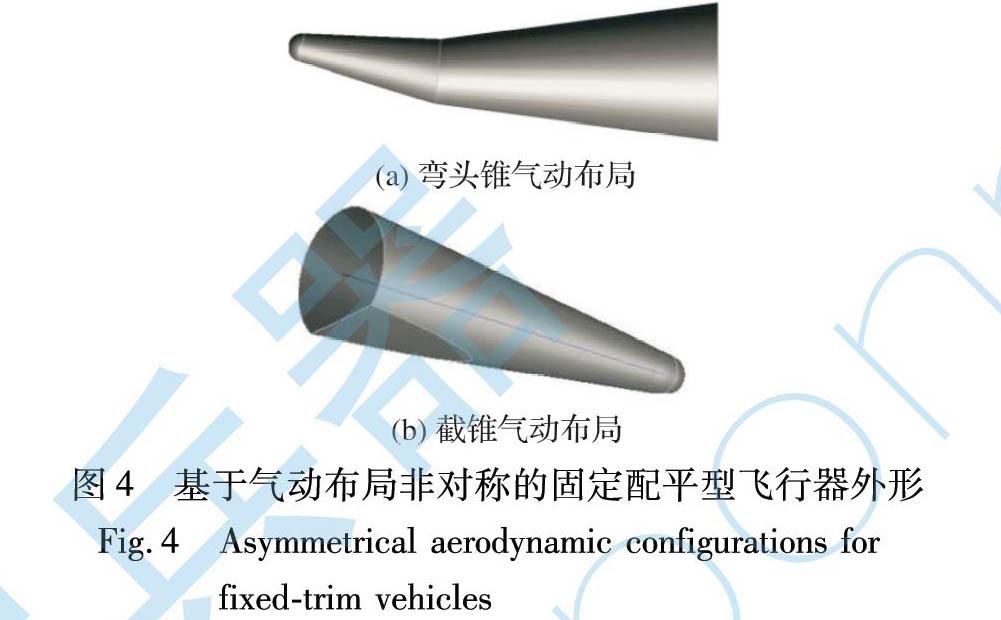
变质心滚转控制(MMRC)是指利用变质心技术实现飞行器滚转姿态控制, 是较早深入研究并成功工程化的一种变质心技术应用模式。 变质心滚转控制最典型的应用对象是固定配平型飞行器(Fixed-trim vehicle), 此类飞行器利用上下非对称气动布局或非对称质量分布特性获得确定的非零配平攻角。 图4所示为采用弯头锥气动布局和截锥气动布局两种方式, 实现飞行器上下非对称气动布局的固定配平型飞行器总体外形。 美国海军研制的MK-500逃逸型机动弹头就是采用了弯头锥外形的固定配平型飞行器, 依赖确定的非零配平攻角产生一定升力, 再以弹头内部电子装置作为可动质量块实现弹头滚转姿态控制[11]。
固定配平型飞行器执行机构少、 结构简单, 但配平攻角大小由气动布局设计提前确定, 变质心也只实现滚转控制, 存在过载大小不可控仅方向可控的特点, 导致其轨迹规划与制导实现存在困难[13-14], 为此, 相关学者经过多年研究提出了多种解决方法。
固定配平型飞行器基于单质量块的滚转控制存在着多刚体复杂动力学建模、 强耦合强鲁棒控制等问题。 美国海军水面作战中心和马里兰大学的研究人员最先开展相关工作, 建立了单质量块飞行器二体七自由度数学模型, 采用现代控制理论的线性最优控制方法设计了滚转自动驾驶仪。 文献[15-16]分别从时域、 频域分析了变质心滚转控制的固定配平型飞行器动力学特性, 研究了变质心滚转控制机理。 文献[17]基于拉格朗日方法建立了单质量块变质心固定配平型飞行器的多刚体动力学模型, 然后采用轨迹线性化方法设计了滚转控制系统, 具有较强的鲁棒性。 刘智陶[18]基于自抗扰控制方法设计了滚转/偏航耦合欠驱动控制器, 利用单个可动质量块同时实现滚转角跟踪和侧滑角镇定, 充分利用了单质量块变质心的控制能力。
3.2 配平控制
变质心配平控制(MMTC)主要用于实现飞行器俯仰通道攻角配平和偏航通道侧滑角配平控制, 是最直接的变质心技术应用模式。 美国海军系统作战中心的Regan等[19]早在1984年就对变质心配平控制进行了研究, 用于修正弹道式再入飞行器航程以提高目标点精度。 随后, 研究人员分别针对快速旋转弹道式轴对称飞行器和慢速旋转再入飞行器开展了变质心配平控制机理研究[20-21], 明确了快速旋转飞行器配平攻角主要由惯性主轴偏移产生, 慢速旋转飞行器配平攻角则依赖于质心偏移和气动阻力的综合作用, 且较小稳定裕度是慢速旋转飞行器实现变质心较大配平控制能力的前提。
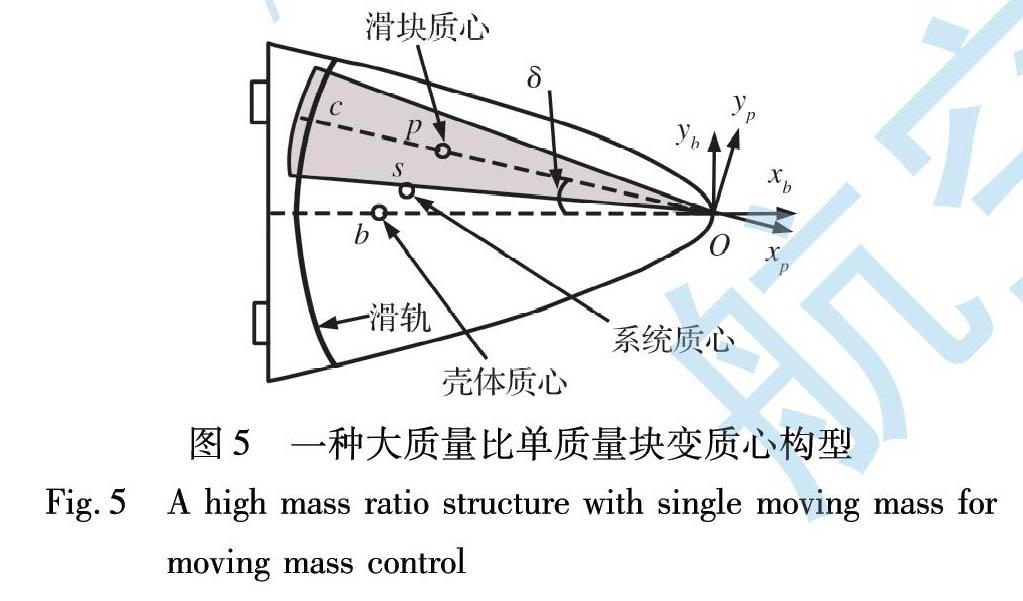
变质心配平控制通常需要配置多个可动质量块, 文献[22]配置三个可动质量块用于完成动能弹头俯仰通道和偏航通道的配平控制, 但多质量块配置必然给飞行器总体布局带来很大压力, 导致基于多质量块的变质心配平控制的工程应用难度很大。 因此, 采用较少质量块实现变质心控制越来越受到研究人员的重视。 如Chen等[23]利用两个可動质量块直角坐标配置, 实现了面对称再入飞行器的俯仰配平控制和滚转控制, 设计了考虑质量块移动行程受限的增益自适应控制方法, 结果表明两个质量块的变质心控制具有较好的动态响应。 Gao等[24]利用单个可动质量块的极坐标配置实现了变质心配平控制, 采用两质量块直角配置或单质量块极坐标配置都能有效减少可动质量块数量, 降低变质心配置对飞行器总体布局的压力。 此外, 李涧青等[25]提出了图5所示的单质量块变质心配置方案, 使可动质量比达到60%以上, 同时保证了质量块配置数量少、 配平控制能力强两方面需求, 但该配置方案的工程可实现性和可靠性还有待深入研究与验证。
3.3 复合控制
随着飞行任务的不断复杂化, 大空域、 高精度、 强机动成为飞行控制的重要需求。 但是, 变质心控制性能受制于飞行器外力作用特性, 如稀薄大气条件下气动力不可用、 稠密大气条件下直接力喷流扰动严重等, 这都导致变质心技术应用场景受限、 控制性能降低。 另一方面, 可动质量块配置受到飞行器内部空间限制和总体布局约束, 且变质心滚转控制(MMRC)模式、 变质心配平控制(MMTC)模式难以实现飞行器三个通道的姿态控制需求。 因此, 变质心与其他控制手段结合, 充分发挥不同控制手段优势, 实现变质心复合控制(MMPC)模式就成为变质心控制发展的必然选择。
变质心与其他手段复合主要有两种方式: 变质心与其他手段分通道并行复合、 变质心与其他手段分时段串行复合。 分通道并行复合, 是指变质心与其他控制手段在时间尺度上并行, 用于实现飞行器不同通道姿态控制的复合模式。 如Li等[26]提出的大质量比变质心配置用于实现飞行器俯仰姿态控制, 而滚转姿态控制和偏航姿态镇定则依赖飞行器尾部安装的直接力装置。 文献[27]为高超声速无动力滑翔飞行器配置两个可动质量块实现俯仰和偏航通道姿态控制, 配置一对副翼实现滚转通道姿态控制, 实现了变质心/气动力分通道并行复合。 分时段串行复合, 是指变质心与其他控制手段在时间尺度上串行, 用于实现飞行器相同通道姿态控制的复合模式。 如王霄婷等[28]针对再入飞行器高空飞行动压过低问题, 高空段采用直接力实现姿态控制, 随着飞行高度降低, 逐渐过渡到采用变质心实现姿态控制, 对变质心/直接力分时段串行复合策略进行了研究。
总之, 变质心复合控制(MMPC)能够有效应对不断复杂的飞行任务需求, 充分发挥不同控制手段优势, 实现控制效能优化, 是具有潜力的控制模式。
4 变质心技术展望
当前, 变质心技术主要研究应用于再入飞行器、 制导弹药、 动能拦截器等高速飞行器的姿态控制中。 但随着人类航天活动范围扩大, 飞行控制对象多样化, 变质心技术的应用场景和应用对象也将进一步扩充。 一方面, 应深入研究突破变质心技术应用的关键难点问题; 另一方面, 结合变质心技术优势, 充分开拓思路, 为变质心技术应用打开更广阔的空间。
4.1 难点问题
变质心控制具有传统气动舵等控制手段无法比拟的优势, 但也面临着诸多关键难点问题, 主要包括: 复杂多体动力学建模、 强耦合强非线性控制、 高动态高性能执行机构设计与研制等问题。 这些关键难点问题的研究突破将直接影响变质心技术未来发展与应用。
采用变质心技术的飞行器不再满足单刚体假设条件, 属于多刚体动力学范畴, 数学模型复杂。 在某些情况下还需要考虑变质心飞行器弹性变形[29], 如具有长细比或楔形布局的飞行器, 此时, 飞行器多体动力学模型更加复杂, 运动耦合作用显著。 充分考虑变质心飞行器复杂多体动力学特性, 建立高精度全量数学模型, 是开展变质心技术研究与应用的首要任务。
变质心飞行器可移动质量块运动带来了更加严重的控制耦合、 惯量耦合以及轨迹/姿态耦合问题。 同时, 受飞行器内部空间限制等, 变质心飞行器存在欠驱动控制、 抗饱和控制等非线性控制问题[30], 研究适用于变质心飞行器的强耦合非线性控制方法, 对于发挥变质心技术优势具有重要意义。
变质心执行机构设计要在考虑飞行器内部空间约束的前提下满足变质心实施方案的具体需求, 避免多质量块运动干涉, 提高质量块质量比和行程范围, 保证需用控制能力。 同时, 由于飞行器高动态、 高过载特点, 飞行器变质心执行机构也应具有高动态、 高效率、 抗高过载等性能, 这就给变质心执行机构的高效传动和高性能伺服提出要求。
4.2 应用展望
基于变质心技术优势, 结合不断提升的航天活动需求, 未来变质心技术有望应用于更多场景和对象。
变质心技术应用于火星探测领域。 变质心控制作为一种低费效比控制方式, 可用于火星探测器再入段飞行控制, 一方面充分利用火星大气环境特性, 另一方面可以减少燃料携带量, 对于火星探测等深空探测任务具有重要意义[31]。 已有研究人员以美国NASA火星探测器为对象, 开展了基于多个可动质量块的变质心火星再入段姿态控制技术研究[32]。
变质心技术应用于平流层飞艇, 能够有效支撑其长航时对地观测等任务[33]。 平流层飞艇具有体积大、 内部空间充足的特点, 特别适合于需配置可动质量块实现高效控制的变质心技术。 文献[34]针对平流层飞艇配置圆弧轨道双质量块, 实现了俯仰/滚转通道姿态联合控制, 并对变质心应用于平流层飞艇的控制能力影响因素进行了分析。
变质心技术应用于低空无人机, 能够有效提高气动效率、 降低翼面结构复杂性等[35-36]。 研究表明, 变质心固定翼无人机姿态控制系统具有较强鲁棒性和抗干扰能力, 能有效应对无人机飞行过程中所面临的各类复杂状况[37]。 此外, 小型电动旋翼无人机的变质心姿态控制也具有足够高的可操纵性, 适用于航空运输、 摄影、 监视、 搜索救援等任务[38]。
变质心技术应用于小型航天器, 有望以低成本、 高效率解决微纳卫星、 立方星可控性差, 而传统控制系统过于复杂等问题。 Huang等[39]就提出利用太阳航行CubeSat受到的太阳辐射压力与CubeSat主动移动产生的变质心控制扭矩, 实现太阳帆姿态操纵和太阳指向稳定的方法。 陆正亮等[40-41]研究了应用变质心技术实现纳卫星轨道机动过程中的姿态稳定控制问题, 回避了常用多喷嘴小推力的姿控发动机系统复杂、 成本高的问题。
不难发现, 由于变质心技术相比于其他传统控制手段的优越性, 其将在深空探测、 对地观测、 通用航空等未来航空航天任务中大有用武之地。
参考文献:
[1] 谢佐慰. 美国机动弹头技术发展概况[J]. 国外导弹技术, 1984(3): 1-24.
Xie Zuowei. Development of Motorized Warhead Technology in the United States[J]. Foreign Missile Technology, 1984(3): 1-24. (in Chinese)
[2] Petsopoulos T, Regan F J, Barlow J. Moving-Mass Roll Control System for Fixed-Trim Re-Entry Vehicle[J]. Journal of Spacecraft and Rockets, 1996, 33(1): 54-60.
[3] Norris R S, Kristensen H M. Russian Nuclear Forces[J]. Bulletin of the Atomic Scientists, 2005, 61(2): 70-72.
[4] 崔利明. 旋转弹头变质心机动控制、 制导系统的研究和仿真[D]. 西安: 西北工业大学, 2000.
Cui Liming. Study and Simulation of Control and Guidance System of Spinning Maneuver Warhead with Variable-Centroid[D]. Xi’an: Northwestern Polytechnical University, 2000. (in Chinese)
[5] 周鳳岐, 易彦, 周军. 克服旋转导弹螺旋运动的方法研究[J]. 宇航学报, 2001, 22(5): 77-81.
Zhou Fengqi, Yi Yan, Zhou Jun. Research on Overcoming the Coning Motion of Rotary Missile[J]. Journal of Astronautics, 2001, 22(5): 77-81. (in Chinese)
[6] 易彦, 周凤岐. 高超声速战术导弹的变质心矢量控制[J]. 中国科学(G辑), 2003, 33(3): 281-288.
Yi Yan, Zhou Fengqi. Variable Centroid Vector Control of Hypersonic Tactical Missile[J]. Science in China(Series G), 2003, 33(3): 281-288. (in Chinese).
[7] 耿克达. 二维变质心机构半物理仿真平台设计[D]. 西安: 西北工业大学, 2011.
Geng Keda. Design of Semi-Physical Simulation Platform for Two-Dimensional Moving Mass Mechanism[D]. Xi’an: Northwestern Polytechnical University, 2011. (in Chinese).
[8] 虞天晔. 稀薄大气下高速飞行器二维变质心/RCS复合控制系统设计[D]. 西安: 西北工业大学, 2018.
Yu Tianye. The Two-Dimensional Moving-Mass/RCS Compound Control System for High-Speed Vehicle in Thin Atomosphere[D]. Xi’an: Northwestern Polytechnical University, 2018. (in Chinese)
[9] 陈浩岚. 高超声速飞行器二维变质心控制系统设计[D]. 西安: 西北工业大学, 2019.
Chen Haolan. The Two-Dimensional Moving-Mass Control System Design for Hypersonic Vehicles[D]. Xi’an: Northwestern Polytechnical University, 2019. (in Chinese).
[10] 王丹妮. 变质心飞行器控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018: 29-43.
Wang Danni. Control Method for a Moving-Mass Vehicle[D]. Harbin: Harbin Institute of Technology, 2018: 29-43.(in Chinese)
[11] 王林林. 再入飞行器制导与控制方法研究[D]. 北京: 北京理工大学, 2016: 4.
Wang Linlin. Research on Guidance and Control System of a Reentry Vehicle[D]. Beijing: Beijing Institute of Technology, 2016: 4.(in Chinese)
[12] 刘智陶, 李涧青, 高长生. 欠驱动变质心飞行器的滚偏耦合自抗扰控制[J]. 北京航空航天大学学报, 2021, 47(2): 281-288.
Liu Zhitao, Li Jianqing, Gao Changsheng. ADRC-Based Roll-Yaw Coupling Control of Underactuated Moving Mass Flight Vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 281-288.(in Chinese)
[13] 周敏, 周军, 卢明飞. 一种面向固定配平型弹头的螺旋机动控制方法[J]. 宇航学报, 2017, 38(11): 1195-1203.
Zhou Min, Zhou Jun, Lu Mingfei. A Spiral-Maneuver Control Method for a Fixed-Trim Warhead[J]. Journal of Astronautics, 2017, 38(11): 1195-1203.(in Chinese)
[14] Dong K X, Zhou J, Zhou M, et al. Roll Control for Single Moving-Mass Actuated Fixed-Trim Reentry Vehicle Considering Full State Constraints[J]. Aerospace Science and Technology, 2019, 94: 105365.
[15] Wang Y F, Yu J Q, Mei Y S, et al. Nonlinear Dynamics of Fixed-Trim Reentry Vehicles with Moving-Mass Roll Control System[J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1249-1261.
[16] 范一迪, 荊武兴, 高长生, 等. 滚控式变质心飞行器动力学特性分析与控制[J]. 宇航学报, 2019, 40(4): 386-395.
Fan Yidi, Jing Wuxing, Gao Changsheng, et al. Analysis of Dynamics Characteristics and Control of a Flight Vehicle with a Moving-Mass Roll Control System[J]. Journal of Astronautics, 2019, 40(4): 386-395.(in Chinese)
[17] Su X L, Yu J Q, Wang Y F, et al. Moving Mass Actuated Reentry Vehicle Control Based on Trajectory Linearization[J]. International Journal of Aeronautical and Space Sciences, 2013, 14(3): 247-255.
[18] 刘智陶. 单滑块滚控式变质心高超声速飞行器制导控制[D]. 哈尔滨: 哈尔滨工业大学, 2019: 40-47.
Liu Zhitao. Guidance and Control of Hypersonic Flight Vehicle with a Single Roll-Control Moving Mass[D]. Harbin: Harbin Institute of Technology, 2019: 40-47.(in Chinese)
[19] Regan F J, Kavetsky R A. Add-On Controller for Ballistic Reentry Vehicles: US, 752766 [P]. 1984.
[20] Robinett R D, Sturgis B R, Kerr S A. Moving Mass Trim Control for Aerospace Vehicles[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(5): 1064-1070.
[21] Zheng Q S, Zhou Z M. Stability of Moving Mass Control Spinning Missiles with Angular Rate Loops[J]. Mathematical Problems in Engineering, 2019, 2019:1-10.
[22] Menon P K, Sweriduk G D, Ohlmeyer E J, et al. Integrated Guidance and Control of Moving-Mass Actuated Kinetic Warheads[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(1): 118-126.
[23] Chen H L, Zhou J, Zhou M, et al. Nussbaum Gain Adaptive Control Scheme for Moving Mass Reentry Hypersonic Vehicle with Actuator Saturation[J]. Aerospace Science and Technology, 2019, 91: 357-371.
[24] Gao C S, Jing W X, Wei P X. Research on Application of Single Moving Mass in the Reentry Warhead Maneuver[J]. Aerospace Science and Technology, 2013, 30(1): 108-118.
[25] 李涧青. 单质量块变质心飞行器动力学与控制问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2018: 22.
Li Jianqing. Research on Dynamic and Control for Single Moving Mass Flight Vehicle[D]. Harbin: Harbin Institute of Technology, 2018: 22. (in Chinese).
[26] Li J Q, Chen S, Li C Y, et al. Adaptive Control of Underactuated Flight Vehicles with Moving Mass[J]. Aerospace Science and Technology, 2019, 85: 75-84.
[27] 李瑞康, 荊武兴, 高长生, 等. 再入弹头质量矩复合控制系统设计[J]. 航天控制, 2009, 27(4): 43-48.
Li Ruikang, Jing Wuxing, Gao Changsheng, et al. Control System Design for Reentry Warhead with Mass Moment Compound Actuate[J]. Aerospace Control, 2009, 27(4): 43-48.(in Chinese)
[28] 王霄婷, 周军, 林鹏. 再入飞行器变质心/RCS复合控制策略研究[J]. 西北工业大学学报, 2011, 29(2): 212-216.
Wang Xiaoting, Zhou Jun, Lin Peng. Proposing Moving Centroid/RCS Control Strategy for Reentry Flight Vehicle[J]. Journal of Northwestern Polytechnical University, 2011, 29(2): 212-216.(in Chinese)
[29] Wang X M, Zhou W Y, Mu R N, et al. Modeling and Simulation of Mass-Actuated Flexible Aircraft for Roll Control[J]. Aerospace Science and Technology, 2020, 107: 106254.
[30] Wei P X, Gao C S, Jing W X. Longitudinal Aerodynamic Coefficients Estimation and Identifiability Analysis for Hypersonic Glider Controlled by Moving Mass[J]. International Journal of Aeronautical and Space Sciences, 2019, 20(1): 31-43.
[31] Yuan J L, Ni K, Zhang Q Z, et al. Modeling of Mars Entry Vehicles with an Internal Sole-Moving-Mass Actuator[C]∥IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), 2018: 1-6.
[32] Atkins B M, Queen E M. Internal Moving Mass Actuator Control for Mars Entry Guidance[J]. Journal of Spacecraft and Rockets, 2015, 52(5): 1294-1310.
[33] Chen L, Gao Q, Deng Y, et al. Moving-Mass-Based Station Keeping of Stratospheric Airships[J]. The Aeronautical Journal, 2021, 125(1289): 1231-1244.
[34] 陈丽, 周革, 段登平. 平流层飞艇变质心姿态运动仿真[J]. 系统仿真学报, 2012, 24(12): 2434-2438.
Chen Li, Zhou Ge, Duan Dengping. Simulation of Moving-Mass Control of Stratospheric Airship[J]. Journal of System Simulation, 2012, 24(12): 2434-2438.(in Chinese)
[35] Haus T, Orsag M, Bogdan S. Mathematical Modeling and Control of an Unmanned Aerial Vehicle with Moving Mass Control Concept[J]. Journal of Intelligent & Robotic Systems, 2017, 88(2/3/4): 219-246.
[36] Brown R. Trim Analysis for an Electric Rotorcraft Utilizing a Moving Mass Control Scheme[C]∥AIAA Scitech 2020 Forum, 2020.
[37] 邱瀟颀, 高长生, 荆武兴. 变质心固定翼无人机动力学分析与抗扰控制[J/OL].北京航空航天大学学报, 2021.https:∥doi.org/10.13700/j.bh.1001-5965.2020.0573.
Qiu Xiaoqi, Gao Changsheng, Jing Wuxing. Dynamic Analysis and Control of Mass-Actuated Fixed-Wing UAV[J/OL].Journal of Beijing University of Aeronautics and Astronautics, 2021. https:∥doi.org/10.13700/j.bh. 1001-5965.2020.0573. (in Chinese)
[38] Darvishpoor S, Roshanian J, Tayefi M. A Novel Concept of VTOL Bi-Rotor UAV Based on Moving Mass Control[J]. Aerospace Science and Technology, 2020, 107: 106238.
[39] Huang H, Zhou J. Solar Sailing Cube Sat Attitude Control Method with Satellite as Moving Mass[J]. Acta Astronautica, 2019, 159: 331-341.
[40] 陆正亮,张翔,于永军, 等. 纳卫星变轨段质量矩姿态控制系统设计[J]. 航空学报, 2017, 38(6): 320778.
Lu Zhengliang, Zhang Xiang, Yu Yongjun, et al. Design of Moving-Mass Attitude Control System for Nanosatellites in Orbital Transfer Stage[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(6): 320778.(in Chinese)
[41] Lu Z L, Hu Y D, Liao W H, et al. Modeling and Attitude Control of Cube Sat Utilizing Moving Mass Actuators[J]. Advances in Space Research, 2021, 67(1): 521-530.
Development and Application of Moving Mass Control Technology
Zhou Min*, Zhou Fengqi, Zhou Jun, Guo Jianguo
(Institute of Precision Guidance and Control, Northwestern Polytechnical University, Xi’an 710072, China)
Abstract: The moving mass technology uses the movement of the internal masses to change the position of the mass center of vehicles. It can avoid thermal ablation, rudder flutter, and high fuel consumption caused by traditional manners such as aerodynamic rudder and reaction control system. It is of high control efficiency and advantageous to maintain a good aerodynamic configuration for vehicles. Based on the connotation of moving mass control, this paper summarizes the characteristics of the two forms of moving mass configuration. The research progress of three moving mass control modes, including roll control, trim control and compound control, is sorted out. Finally, key problems faced by the moving mass technology, such as complex multi-body dynamics modeling, strong coupling and strong nonlinear control, design and development of high dynamic and high performance actuator, are discussed. By looking forward to the new scenarios of moving mass control application, the future research direction is pointed out.
Key words: moving mass; configuration form; roll control; trim control; compound control; flight control
