考虑间隙非线性的控制舵非线性气动弹性分析
2021-01-05 11:51:14李家旭田玮谷迎松
航空工程进展 2020年6期
李家旭,田玮,谷迎松
(1.航空工业陕西飞机工业(集团)公司 设计院, 汉中 723213)(2.西北工业大学 结构动力学与控制研究所, 西安 710072)
0 引 言
一直以来,飞行器气动弹性问题都是航空航天领域研究的重点问题之一,备受关注,极大地推动了我国飞机气动弹性力学的研究和发展。然而,现代航空航天飞行器在具备更高飞行速度、更强机动性能的同时,涉及的气动弹性问题越来越复杂,带来的非线性问题也越发明显[1]。控制舵结构作为飞行器典型升力面结构之一,相比其他结构部件,其操纵刚度相对较低,更易发生颤振失稳。
在生产过程中,不可避免地出现超差、装配误差等因素,同时飞行器运动过程中也会出现磨损等现象,从而导致飞行器结构出现间隙非线性。它作为最常见的一种集中非线性环节,在当前飞行器气动弹性分析中需要被重点考虑[2]。杨智春等[3]从建模方法、分析方法及动力学行为等方面对含结构集中非线性的机翼颤振研究进行了探讨和总结,其中,控制舵的舵轴连接处及其操纵刚度都可能存在间隙非线性环节,这些都会改变系统的动力学特性及操控性能。该问题也受到了国内外研究人员的广泛关注[4-12]。基于双协调自由界面法,Wu Zhigang等[13]建立了带间隙折叠翼的结构模型,并通过地面振动试验验证了建模与辨识方法的有效性;Yang Ning等[14]针对含间隙非线性舵结构,提出了一种基于动态子结构法的气动弹性建模方法,用于非线性颤振分析;何昊南等[15]从实验和仿真两方面对含有间隙的折叠舵面建模方法及响应分析进行了研究;R.D.Firouz-Abadi等[16]建立了带有间隙的三维双楔型机翼模型,考察了关键参数对非线性动力学特性的影响规律;Tian Wei等[17]针对含有间隙的三维全动舵面模型,考察了气动载荷和热载荷作用下间隙对非线性气动弹性响应特性的影响规律。然而,考虑局部结构间隙影响的舵面非线性颤振机理研究尚有不足,尤其当含有多个非线性环节时,间隙对系统颤振和非线性动力学响应是如何影响的,这些都缺少系统的研究。
综上所述,本文针对考虑间隙非线性的控制舵非线性气动弹性系统,着重考察间隙非线性对舵面非线性颤振特性的影响机理。应用Lagrange方程建立考虑俯仰和扑动方向的控制舵动力学方程,利用基于样条插值函数获得气动力降阶模型,并应用最小状态法将降阶频域气动力模型拟合成时域气动力模型;分别考察仅有俯仰间隙、仅有扑动间隙及两个自由度同时含有间隙情况下系统的颤振稳定性及非线性动力学响应特性。
1 理论模型
1.1 控制舵结构建模
刚性全动舵面的结构模型如图1所示,可以在其根部绕x轴和绕y轴转动,分别代表全动舵面扑动方向(β)和俯仰方向(α)的运动,并且舵面的根部在扑动和俯仰方向上分别施加一个弹簧约束,即Kβ和Kα。对于该全动舵面气动弹性模型,其动能和势能可以由式(1)和式(2)得到:
(1)
(2)
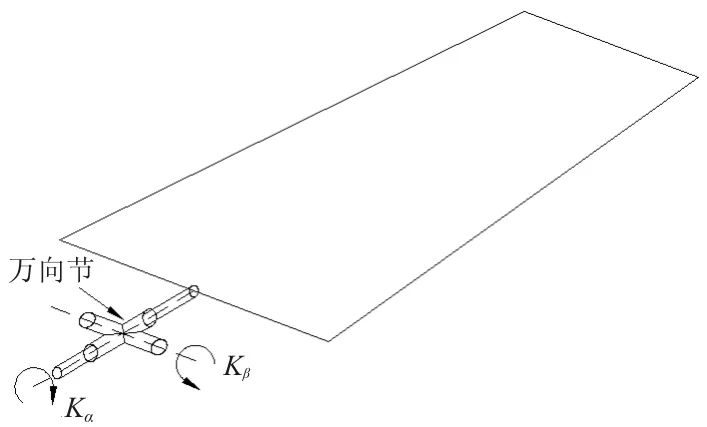
图1 全动舵面模型的平面几何示意图
通过应用Lagrange方程:
(3)
建立系统的运动方程,其运动方程矩阵形式为

(4)
式中:x=[βα]T为状态向量;M和K分别为广义质量阵和刚度阵;Q为广义外载荷。
当不考虑结构阻尼时:
对于含有俯仰和扑动间隙非线性的控制舵模型,其动力学方程可写为

(5)
式中:M(x)=[g(β)f(α)]T,为弹性恢复力项。
俯仰和扑动方向的非线性恢复力矩表达式分别为
(6a)
(6b)
式(6)中的恢复力矩可分写为线性项和非线性项的形式,即:
f(α)=Kαα+f1(α)
(7a)
g(β)=Kββ+g1(β)
(7b)
其中,
最终,弹性恢复项可表示为M(x)=K+FN,FN=[g1(β)f1(α)]T。
1.2 控制舵气动力建模
在对全动舵面动力学系统进行气动弹性求解时,需要实时地计算广义外载荷的非定常气动力。为了提高计算效率,本文采用升力面理论中的偶极子格网法进行气动力建模,利用基于样条函数的降阶方法对频域气动力进行降阶,从而得到降阶的气动力模型,再应用最小状态法将频域气动力模型转换到时域上。
1.2.1 频域气动力模型降阶的理论方法
工程上常用的升力面方法,如偶极子格网法和ZONA51等,则是通过气动力影响系数矩阵来计算气动力[18-19]。频域非定常气动力模型可以表示为
Q=q∞A(ω)z
(8)
式中:q∞为动压;A(ω)为非定常气动力影响系数矩阵;ω为简谐振动圆频率;Q和z分别为力向量和位移向量。
常用的样条插值函数有面样条函数和梁样条函数[20],它们都是通过样条矩阵来实现力与位移的插值。假设将式(8)的频域气动力模型降阶到Ns个节点上,则有如下样条插值关系:
(9)
式中:Qs和zs分别为Ns个节点上的气动力、位移组成的列向量;Gs为插值矩阵。
将式(9)代入式(8)即可得到基于样条函数的非定常气动力降阶模型:
Qs=q∞Ass(ω)zs
(10)

1.2.2 气动力模型的时域拟合
经过上述过程可以得到降阶频域气动力模型,下面通过最小状态法将该模型转换到拉式域中,从而用于时域分析[19]。这里,最小状态法将已知的空气动力矩阵Q(k,M∞)在Laplace域中进行近似,具体形式如下:
(11)

气动力经过最小状态法近似后,运动方程表示为

(12)
引入的状态变量为
(13)
由此,可以得到系统状态空间方程:
(14)

上述过程得到的是Ns个节点上的时域降阶气动力,但对于刚性全动舵面只需要扑动和扭转两个自由度的运动,因此,需要通过变换矩阵得到扑动和俯仰两个自由度上的位移β和α,以及广义力Qβ和Qα。具体关系如下:
(15)
(16)
式中:R为变换矩阵。
R具体为
(17)
式中:xi和yi分别为降阶点到俯仰和扑动轴的距离。
因此,通过上述变换,系统状态空间内的气动弹性方程式(14)变为
(18)

RsR=Rs。
这样,即可利用数值方法来实现带间隙非线性的全动舵面模型的气动弹性响应仿真。
2 算例与分析
三维控制舵在MSC.Adams软件平台上建立的动力学模型如图2所示,可以看出:在舵面根部作用有万向节和两个转动弹簧,其中,万向节用于约束系统的3个平动自由度和绕z轴的转动自由度。
在本文算例中,三维舵面的结构参数若无特别说明均如表1所示。
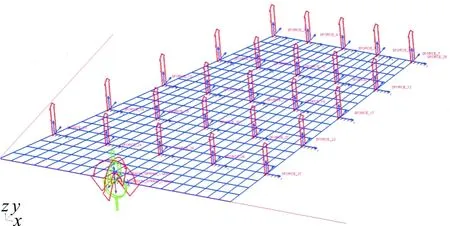
图2 三维控制舵的MSC.Adams动力学模型
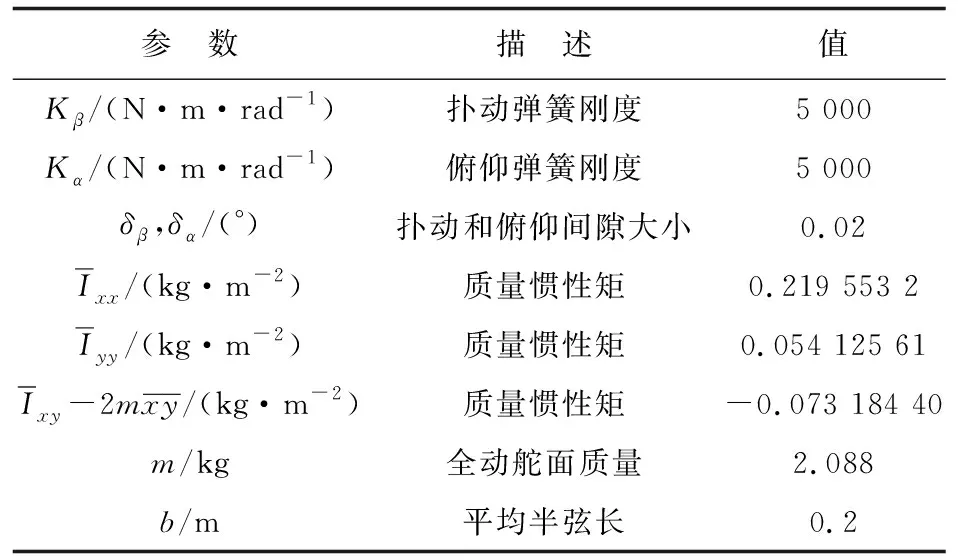
表1 三维控制舵的结构参数
2.1 线性颤振分析
对于三维控制舵线性颤振系统,通过系统矩阵特征值分析获得线性系统的颤振特性,如图3所示。线性颤振速度和频率分别为259.63 m/s和44.91 Hz,并将该时域结果(Time Domain,简称TD)与Nastran频域和Adams时域仿真结果进行对比,如表2所示,可以看出:三种方法计算得到的颤振结果吻合得很好,系统颤振是由扑动-俯仰模态耦合振动导致。上述对比结果验证了该分析模型的有效性和准确性。
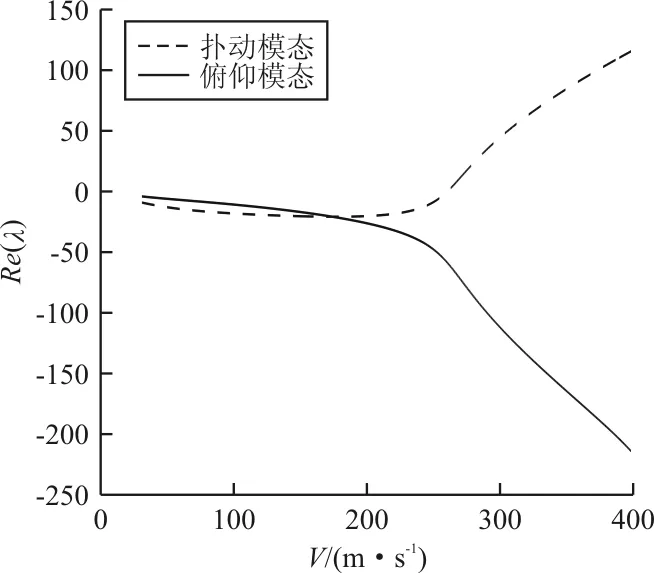
(a) 实部
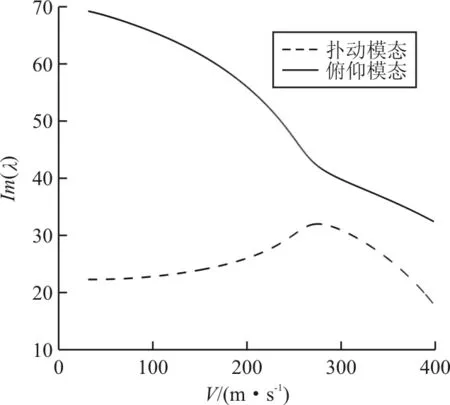
(b) 虚部
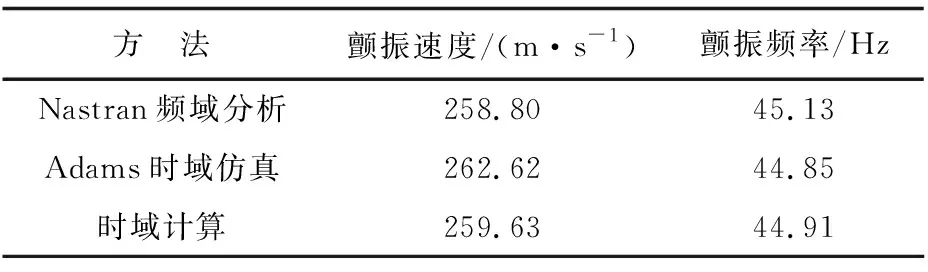
表2 线性颤振速度和频率的结果
在三维控制舵线性颤振系统中,俯仰和扑动弹簧刚度对系统颤振特性有着很大的影响。线性颤振速度和颤振频率随俯仰弹簧刚度的变化规律如图4所示,可以看出:系统的颤振速度和频率随着俯仰弹簧刚度系数的增加而增加。这是因为俯仰弹簧刚度的增加,使得俯仰模态分支的频率增加,推迟了两个运动模态分支频率的接近,从而导致颤振速度提高,相应的颤振频率也提高。
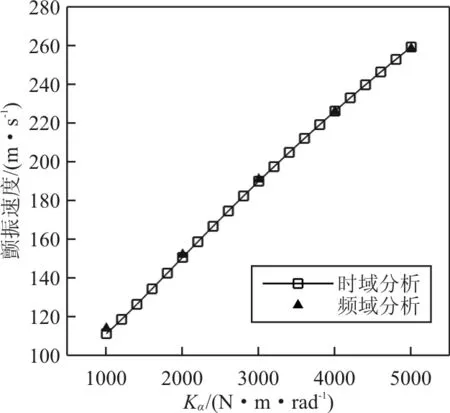
图4 颤振速度随俯仰弹簧刚度系数的变化
线性颤振速度和颤振频率随扑动弹簧刚度的变化规律如图5所示,可以看出:与俯仰弹簧刚度不同,随着扑动弹簧刚度系数的增加,系统颤振速度降低。产生该结果的原因是由于扑动弹簧刚度的增加,使扑动模态分支的频率增加,两个模态分支的频率更接近,导致系统颤振速度降低。
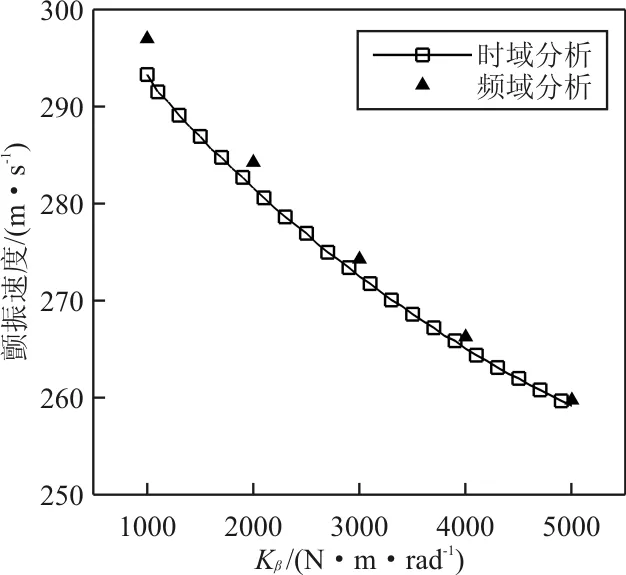
图5 颤振速度随扑动弹簧刚度系数的变化
综上可知,提高俯仰弹簧刚度可以提高颤振速度,增加系统的稳定性;而扑动弹簧刚度的增加,会降低颤振速度,不利于系统的颤振稳定性。
2.2 仅考虑俯仰间隙非线性
利用等效线化方法(Equivalent Linearization Method,简称ELM)[21]进行非线性颤振分析。俯仰间隙非线性的等效线性刚度曲线如图6所示,可以看出:当幅值在间隙大小之内,等效刚度系数为零;当幅值大于间隙值时,随着幅值的增加,等效线性刚度增加,表现出“硬弹簧”特性;当幅值继续增大时,等效线性刚度将趋近线性刚度。
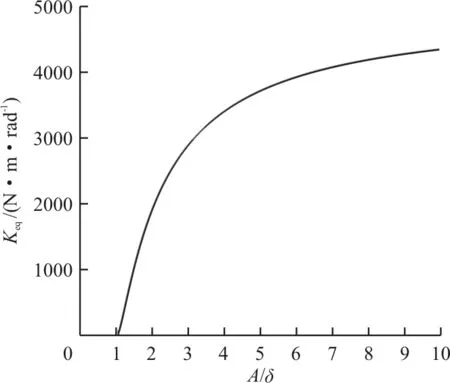
图6 间隙非线性的等效线化刚度系数
系统俯仰角幅值与间隙值之比随速度和频率的变化规律如图7所示。从图7(a)可以看出:随着速度的增加,系统俯仰角与间隙大小之比呈增加趋势;从图7(b)可以看出:俯仰角幅值与间隙值之比越大,相应的运动频率也越大,并且系统发生极限环颤振的频率小于线性颤振频率。
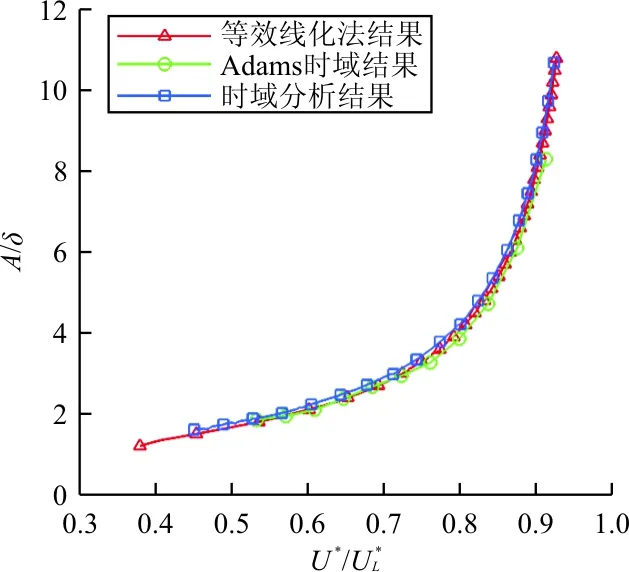
(a) 系统俯仰自由度的运动幅值随速度的变化规律
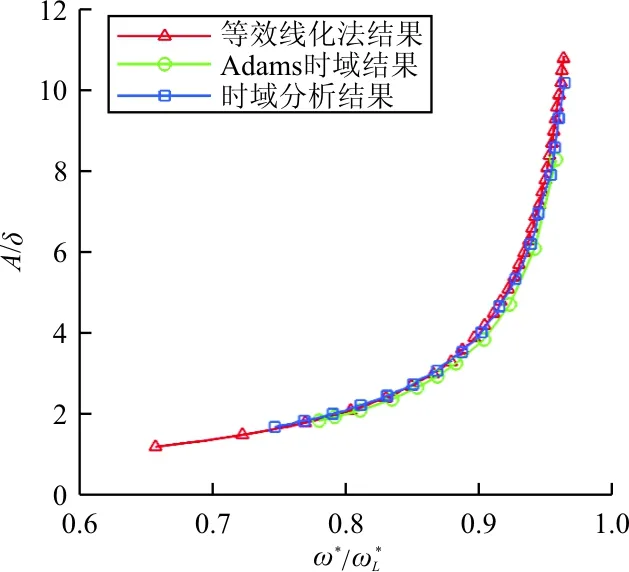
(b) 系统俯仰自由度的运动幅值随频率的变化规律
俯仰弹簧刚度对系统颤振速度和颤振频率的影响规律如图8所示,可以看出:在A/δ>1时,系统颤振边界随俯仰弹簧刚度增加而提高。因此,对于含俯仰间隙的控制舵系统,俯仰弹簧刚度的增加可以提高系统的颤振边界。
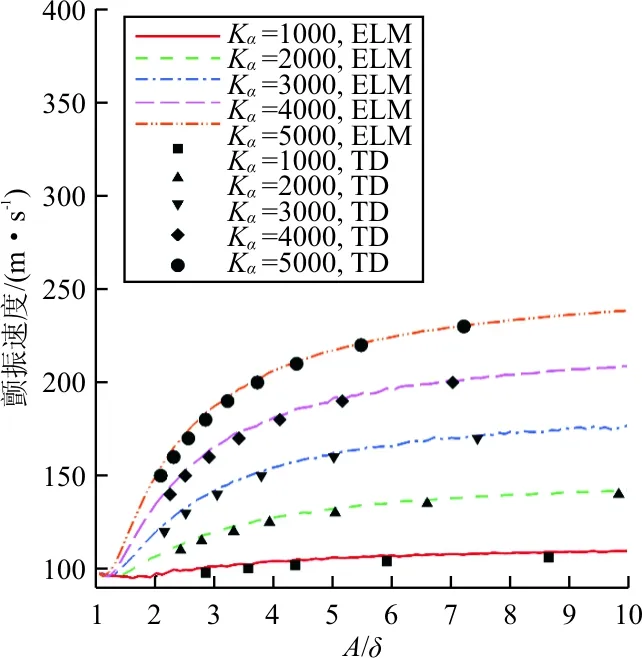
(a) 颤振速度

(b) 颤振频率
2.3 仅考虑扑动间隙非线性
系统颤振速度随扑动角与间隙大小之比的变化规律如图9所示,并将时域计算结果与等效线化法得到的结果进行比较。
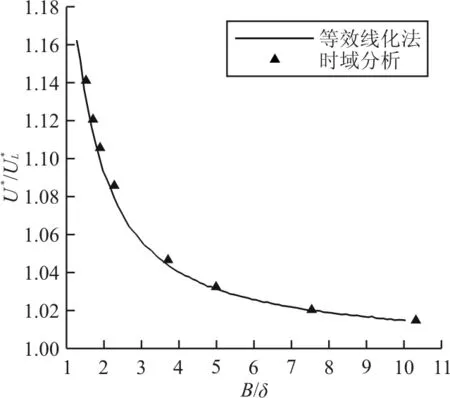
图9 系统扑动方向运动幅值随速度的变化规律
从图9可以看出:两种方法的结果吻合一致,并且当扑动方向带有间隙非线性时,随着扑动运动幅值的增加,系统颤振边界降低,而颤振频率随之增加。这一规律与线性颤振系统中改变扑动弹簧刚度的结果是类似的。
在系统受到一定扰动后,系统振幅超过当前运动幅值,则系统进入不稳定区域从而导致运动发散,而当系统振幅小于当前运动幅值,系统运动收敛。因此,含有扑动间隙非线性的系统不能得到稳定的极限环运动。而在时域分析中,需要通过调整不同速度来寻找系统不稳定的极限环运动,而此时对应的速度就是系统的不稳定颤振边界。
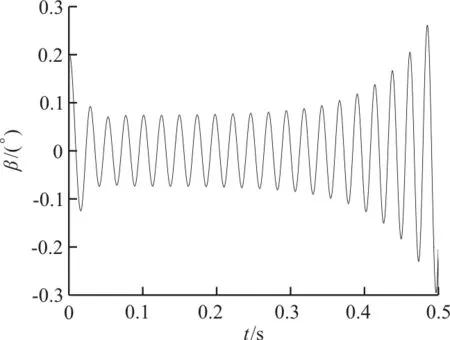
U*= 271.75和U*= 271.76时,时域响应和相平面图分别如图10~图11所示,可以看出:在0.3 s左右之前存在一段等幅运动,并且两个相邻速度下等幅运动的幅值基本相同,但0.3 s之后的响应分别为收敛和发散,因此,该等幅运动的幅值所对应的颤振速度和频率即为系统的不稳定颤振边界上的点。
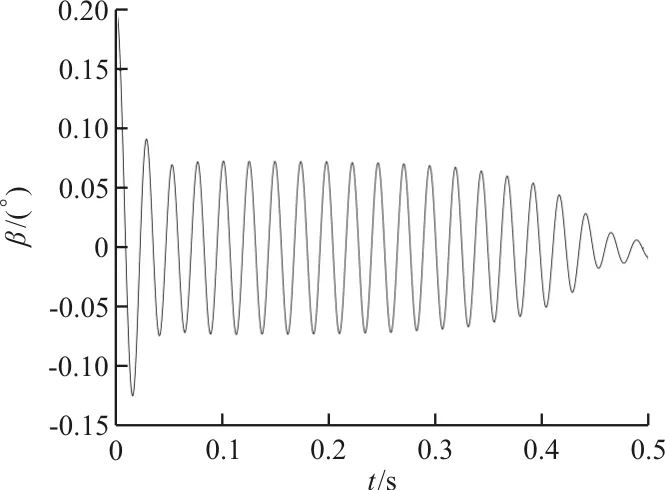
(a) 时域历程
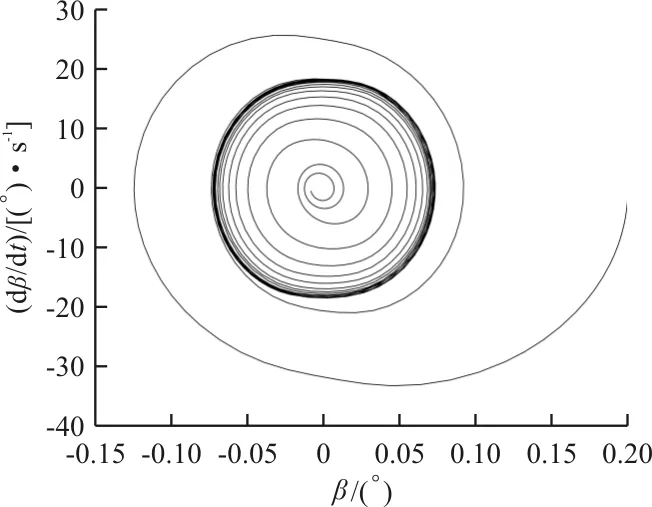
(b) 相平面图
(a) 时域历程
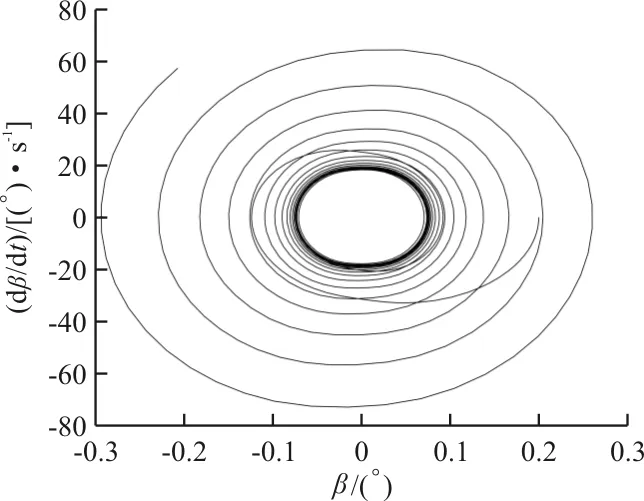
(b) 相平面图
综上可知,在扑动自由度带有间隙非线性的控制舵气动弹性系统中,系统的颤振边界大于线性颤振速度,并且该系统的颤振速度随振幅的增加而降低。
2.4 同时考虑俯仰和扑动间隙非线性
对于控制舵系统两个方向同时含有间隙的情况,系统俯仰和扑动运动的分岔图分别如图12~图13所示,可以看出:在线性颤振速度内,系统会出现有限幅值的动力学响应,而当速度大于线性颤振速度时,系统响应将发散。
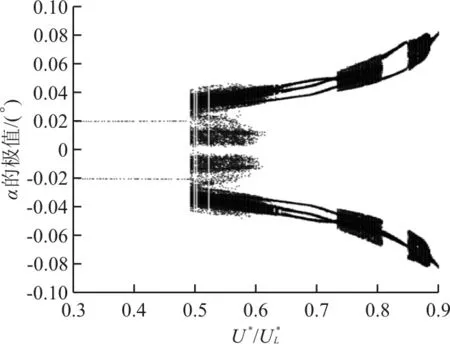
图12 控制舵俯仰运动的分岔图
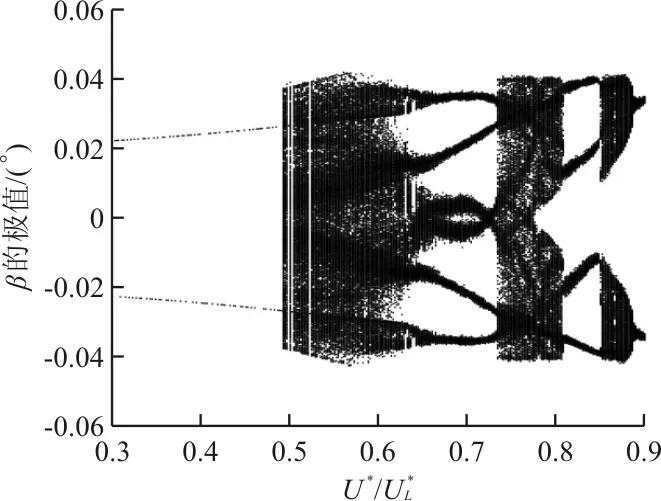
图13 系统扑动方向运动的分岔图
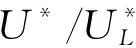
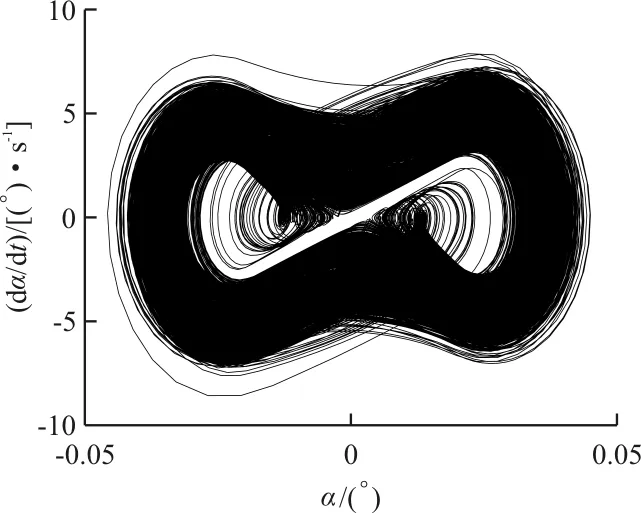
(a) 相平面图
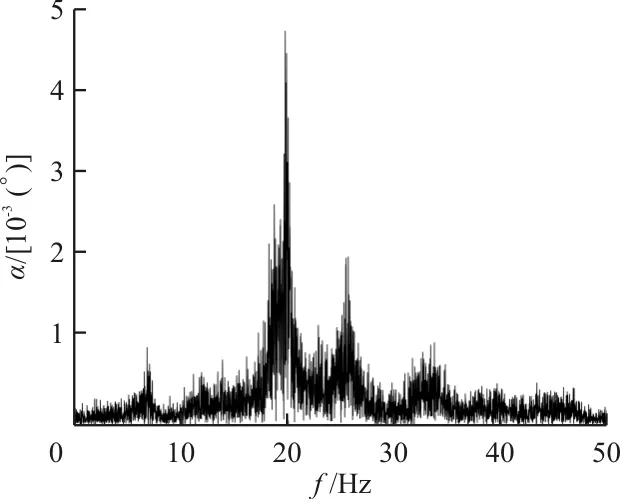
(b) 幅值谱
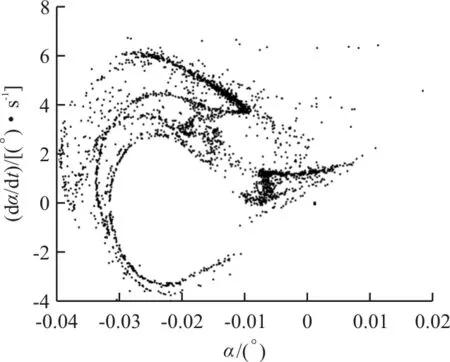
(c) Poincare映射图
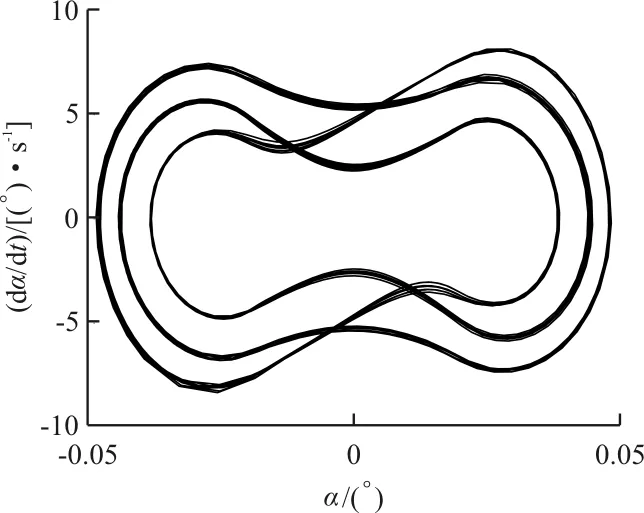
图时系统俯仰方向运动
根据上述分析可知,当俯仰和扑动方向同时含有间隙非线性时,系统的运动与仅含有俯仰间隙非线性系统类似,即在线性颤振边界内存在有限幅值的非线性动力学响应。并且,控制舵在颤振边界内表现出多周期LCO、混沌等复杂动力学响应。
3 结 论
(1) 采用本文建立的时域模型,相比于Nastran频域和Adams时域仿真结果,具有足够精度可用于预测三维控制舵模型的颤振稳定性及非线性动力学响应。
(2) 提高俯仰弹簧刚度可以提高颤振速度,增加系统的稳定性,而扑动弹簧刚度的增加会降低颤振速度。
(3) 对于含有俯仰间隙的控制舵系统,在颤振边界内会出现稳定的极限环运动;而对于含有扑动间隙控制舵系统,系统不存在稳定极限环运动,并且系统颤振速度随振幅的提高而持续下降。
(4) 对于控制舵系统同时含有俯仰和扑动间隙非线性的情况,在颤振边界内存在多周期LCO、混沌等复杂动力学响应。
猜你喜欢
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
测控技术(2018年11期)2018-12-07 05:49:02
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
西北工业大学学报(2015年4期)2016-01-19 03:31:37
航空学报(2015年4期)2015-05-07 06:43:37
航空学报(2015年4期)2015-05-07 06:43:25
电测与仪表(2015年2期)2015-04-09 11:28:50
振动工程学报(2015年1期)2015-03-01 01:15:46