
无人机在大比例尺地形测量中的应用
2020-12-31 05:19熊世旺
建材发展导向 2020年23期
熊世旺
(中国水利水电第四工程局有限公司,青海 西宁 810007)
现以大疆精灵4RTK无人机配合pix4dmapper软件和清华山维EPS软件为例,介绍一下xx水电站吉介土弃土场1∶2000比例尺地形测量的方法。
1 大疆精灵4RTK无人机主要技术参数
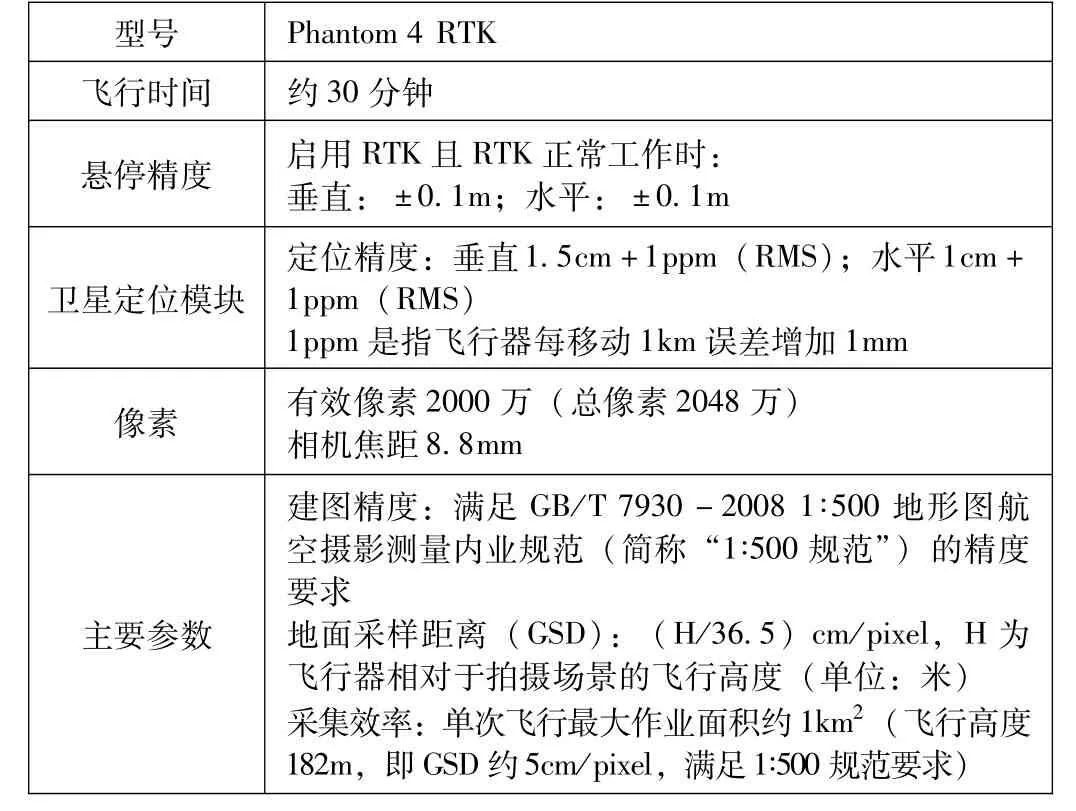
型号 Phantom4RTK飞行时间 约30分钟悬停精度 启用RTK且RTK正常工作时:垂直:±0.1m;水平:±0.1m卫星定位模块定位精度:垂直1.5cm+1ppm(RMS);水平1cm+1ppm(RMS)1ppm是指飞行器每移动1km误差增加1mm像素 有效像素2000万(总像素2048万)相机焦距8.8mm主要参数建图精度:满足GB/T7930-20081∶500地形图航空摄影测量内业规范(简称“1∶500规范”)的精度要求地面采样距离(GSD): (H/36.5)cm/pixel,H为飞行器相对于拍摄场景的飞行高度(单位:米)采集效率:单次飞行最大作业面积约1km2 (飞行高度182m,即GSD约5cm/pixel,满足1∶500规范要求)
2 测区的概况
XX水电站吉介土弃土场位于澜沧江左岸电站坝址上游1.5km处。测区上下游长度约2km,左右岸宽度约0.4km,测图面积约为0.8km2。测图范围内地形较为平坦,高差起伏不大,且植被已清除,居民已搬迁,房屋已拆除,对于使用无人机测量地形图自然环境相对有利。
3 测前准备
3.1 像控点布设与测量
像控点的精度和数量直接影响到数据后处理的精度,所以像控点必须尽量规范、严格和精准。像控点尽量选择在地势平坦,不易破坏的地方。应避免树木、电线、房角等容易被物体遮挡的地方,像控点标志物应与地表颜色应形成鲜明的对比,易于分辨。布设像控点的材料应选择能够持久存在的材料,如喷漆、胶带等。距测区边缘应有一定距离,防止距离边缘较近,影响成图精度。综合上述本工程采用正规布点方法均匀布设在测区内,全野外布设了15个像控点。
像控点采用测区附近的高等级控制点作为起算点,经过复核无误后,用GNSSRTK模式进行测量,基准站架设在测区中央或最高处,以保证数据链的无遮挡传输。设置基准站、移动站、求取转换参数。在进行转换参数的求取时,已知控制点的个数不小于3点,并且转换参数的残差值小于0.02m,像控点的观测时间均大于60s。施测时应尽量检测原有高等级或同等级控制点是否与原成果一致以作检核,其目的是更好的保证像控点的点位精度。
3.2 外业航拍
①起飞前检查;②检查无人机和遥控器电量是否充足;③内存卡是否安装好;④螺旋桨安装是否牢固;⑤平板和遥控器是否通过数据线连接;⑥返航点是否刷新。
3.3 测区航线规划
在外业数据采集前,本工程通过大疆精灵4RTK带屏遥控器在APP上采用影测量2D(井字飞行)进行航线规划航线。
3.4 无人机参数设置
根据测图要求选择相应的航拍高度和飞行重叠度。飞行高度和返航高度根据成图比例尺的要求进行设定。本工程成图比例尺为1∶2000即可满足要求,所以,飞行高度确定为100m,航向重叠和旁向重叠均设置为85%。
4 摄影比例尺及航高确定
摄影比例尺与航高计算公式
式中m为航摄比例尺分母,f为相机的主距(焦距),H为航高。
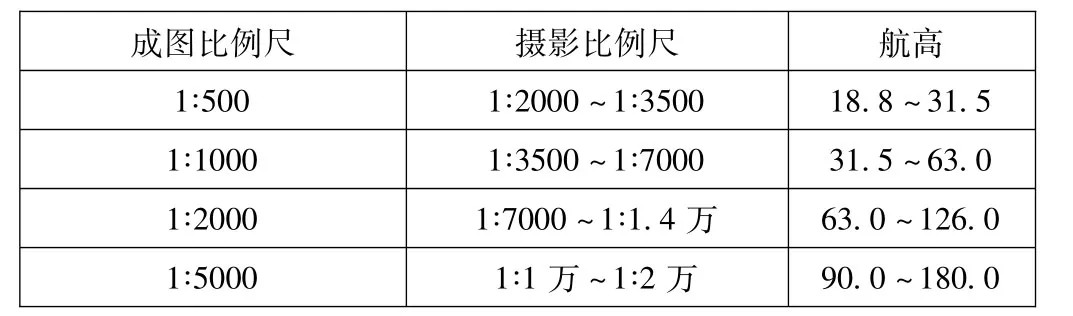
大疆RTK无人机航高确定对比表
4.1 航测重叠度确定
重叠率一般选择默认值,若测区实地起伏较大或建筑较多,可通过点击“+”号加大重叠率值。但根据航测成图要求:航向重叠不小于60%,旁向重叠不小与30%。真正射的重叠度要求:相邻航片的重叠度不能小于85%。
4.2 执行飞行任务
测区以及参数设置完善之后,点击“执行”,无人机自动检测参数,参数正常后,飞行器即可自动起飞并执行任务。
4.3 返航
当执行完拍摄任务后,无人机会自动返航,自动返航过程中,可通过短按遥控器上的强制返航按键取消自动返航。
5 数据处理
航拍完成后,利用pix4dmapper软件,对影片进行处理,按照软件操作流程即可实现自动处理生成数字正射影像图(DOM)、数字高程模型 (DEM)、数字表面模型 (DSM)文件。
pix4dmapper软件操作流程:
建立工程→加入影像资料→设置影像属性(包括图像坐标系和地理定位和方向和相机型号)→加入外业控制点(1个控制点至少在2张相片上标出来,通常标注在3-8张图像上)→全自动处理→质量报告分析→点云以及正射影像编辑输出。
6 垂直摄影三维测图
清华三维EPS三维测图系统可实现基于DOM和DSM的垂直摄影三维测图,支持DOM与DEM叠加生成实景三维模型,支持多窗口同步测图,二三维联动,支持轮廓线自动提取等功能。
操作流程
新建EPS工程→生成垂直摄影模型→加载垂直摄影模型→加载超大影像→数据采集→数据检查(合格)→数据输出。
6.1 生成垂直摄影模型
基于pix4dmapper生成的DOM和DEM生成实景三维模型DSM,生成过程自动构建,保证大数据实景模型的流畅显示,DOM和DEM必须是同名的”.TFW”坐标文件。
6.2 加载垂直摄影模型
加载DSM实景表面模型:在三维窗口加载DSM实景表面模型,选择同目录下生成的DSM文件。
6.3 加载超大影像
加载超大影像支持加载超大的数据影像,加载后第一次转换会自动创建一个OVR格式的和TIFF同名的文件。
加载超大影像时选择DOM (目录下要有同名的TFW 坐标文件)正射影像数据,加载到二维窗口。
6.4 高程点的采集
自动提取垂直模型高程点(EPS提供了点选,线选,面选的方式提取高程点),可根据实际需要,自主选择高程点提取的方法。
通过EPS的自带功能,依次采集房屋和道路和其他地物数据后。输出CASS数据文件,即可得到我们想要的工程地形图。
6.5 质量检查
地形图生成后,采用RTK进行实地数据采集检查,主要包括了边长采集、碎部点采集等方法进行,根据采集的数据与EPS生成的地形图进行对比,检查数学精度,具体方法为:将采集的平面坐标展点上图,量取地形图上的同点坐标,通过对比,计算误差统计地形图平面或高程绝对位置中误差。本工程共检查了50点,图上地物点相对于临近的图根点的地形图精度均满足图上地物点点位中误差±0.5mm,高程中误差±1/3hd的要求。
7 结语
随着无人机技术不断成熟和相应处理软件的不断更新,无人机航测法在在工程中得到了得到了广泛应用和推广。采用无人机测绘和传统测量的方法比较,具有精度高,效率高和低成本的优点。无人机测绘将取代传统测绘,将成为测量新时代。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
当代陕西(2020年23期)2021-01-07
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
北京航空航天大学学报(2017年4期)2017-11-23
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
