新能源汽车遥控驾驶功能分析
2020-12-30 06:59伍庆龙
汽车文摘 2020年1期
伍庆龙
(中国第一汽车股份有限公司 新能源开发院,长春 130013)
主题词:电动汽车 遥控驾驶 功能对标 控制策略
1 Introduction
With the development of automobile industry,the application fields of vehicle are widely expanded,and the convenience of vehicle driving has been paid much more attention than ever before.The different operation modes can be designed for new energy vehicles because of the particularity of powertrain system[1],and the different driving situations are developed and displayed on the instrument cluster[2].The driver,however,usually needs to turn the steering wheel and gear the shift by his or her hands,and the driver also needs to manually control the vehicle to move in a short-range driving.All of these driving situations need to be completed by the driver in the vehicle.However,if the parking space is narrow or the mountain road is rugged,then it is bound to bring difficulties for the drivers to control the vehicle,which doomstobeastressful task for them.
The rapid development of automotive industry and the extraordinary growth of the vehicle population have been bringing about a series of issues in China,including seriousparkingproblems.
In recent years,the aging population is increasing,associated with speedy urbanization in China,the number of vulnerable groups,such as female drivers,elderly drivers,is increasing,the number of cars is also increasing rapidly in urban residential districts,therefore the parking,together with short distance maneuver around many communities in residential district have already been major pain points for mobility,these pain points make daily drive painful experiences.
According to the UN report,in 2050 68%of the population on earth will live in cities[3].China’s urbanization will also encourage more people to live in cities.
With the development of smart city and smart mobility in megacities in China,car parking with RCD can be denser which will allow more cars to park in residential districts,denser parking will be of significant to utilize parking lot efficiently in megacities,RCD function in future mobility will bring fresh,exciting features for all customersin termsof user perceptive qualities.
Due to above mentioned attractive features for customers,many companies have been investing in research on intelligent function of Remote Control Drive(RCD).Ford is testing a remote control technology based on 4G LTE connection,the vehicle owner can control the vehicle remotely thousands of kilometers away.At the Global Mobile Broadband Forum held in London in 2017,Huawei,together with Vodafone,the 5G innovation center of Surrey University and Munich University of technology,demonstrated the first 5G RCD function in Europe.In Shanghai,Huawei,cooperated with SAIC and China Mobile,demonstrated the RCD function based on passenger cars in Jiading[4]. These technologies demonstrate potential and benefits in terms of convenience for drivers to park remotely in the future.
In this paper,the function development and analysis of Remote Control Drive(RCD)are introduced based on driving scenarios and vehicle benchmarks and the RCD system architecture scheme is proposed.The purposes of RCD analysis and introduction are to provide references for the future function development of NEVs.
2 Scenario Analysis of RCD
The function of RCD refers to the remote operation that can be used to control vehicle’s maneuvers,within a certain distance by the driver outside the vehicle,i.e.for⁃ward,backward and steering.The remote control vehicle is operated by driver through the wireless control platform such as mobile phone or some other devices[5].With the help of digital communication technologies,RCD functions and technologies enable the driver's control intention and vehicle running state to be compiled,transformed and pro⁃cessed[6-7].Finally,the intelligent ECUs(Electric Control Units)and actuators are controlled to complete the vehi⁃cle's maneuvering.
The application scenarios of RCD include parking,warehousing,short distance driving,etc.The function concept of RCD is different from that of vehicle automatic driving.The purpose of function development for RCD is to assist the driver to complete some complex drive tasks and it is used to improve the vehicle driving experiences.Driving a vehicle with RCD is much more convenient and relaxed comparing with that of without RCD.
For the scenarios of parking and warehousing,when the vehicle is parked in or out in a narrow space,normally the doors of vehicle cannot be opened,in this case,based on the RCD function,the driver can control the vehicle,without sitting in the driver cabin,to maneuver target vehicle in or out of the warehouse.For the scenarios of short distance driving,when the vehicle is driving on the narrow and rough road,because the driver is not sure whether the vehicle can be passed smoothly,with RCD function,the driver can operate outside the vehicle,make vehicle passsafely and smoothly.
3 Application Benchmarksof RCD
3.1 RCD Function of Land Rover
The operation method of RCD developed for Land Rover Discovery is controlled by the mobile terminal,such as mobile phone[8].The driver controls acceleration,braking and steering of the vehicle by the mobile phone outside the vehicle.When the RCD function is triggered,the vehicle speed is limited to 6 km/h.And the distance between the vehicle and the driver shall be less than 10 m.When it is more than 10 m,the automatic stop function of the vehicle will be triggered.
3.2 RCD Function of BMW
The operation method of RCD developed for BMW i8 is controlled by the vehicle intelligent touch key.The driver controls accelerating,braking and steering of the vehicle by the intelligent touch key outside the vehicle,and the vehicle can be controlled to realize about 10°steering angle adjustment.The information about the new energy power system,such as State of Charge(SOC)for battery,driving range,fuel allowance,charging time,etc.,will be displayed on the screen of BMW i8 intelligent touch key.The function development improves the performance of the product and thereby enhances the attractiveness of the product toconsumers.
3.3 RCD Function of ZF
The operation method of RCD developed for ZF is controlled by the mobile terminal,as shown in Fig.1.The vehicle speed can be selected by the driver in the range from 1 to 8 km/h.The driver also can operate the gear(PRND)and control the accelerating,braking and steering of the vehicle.The vehicle can be moved forward,backward and turned by touching the pattern of the car or trailer on the mobile terminal screen according to the driver's wishes.The RCD technology developed by ZF can provide much more convenience for the driver to reverse for the tourist trailer,and is widely used in Europe.

Fig.1 RCD demonstration of ZF[9]
3.4 RCD Function of BYD
The operation method of RCD developed for BYD is controlled by the vehicle intelligent touch key.When the vehicle power is off and the gear position is P,the driver can start the vehicle by pressing the key"start"button for a while.The driver can move the vehicle to the appropriate direction by pressing the"forward"or"backward"button for a short time,and the vehicle will be stopped slowly when the button is released.The driver can control the steering wheel rotation by pressing the"turn left"or“turn right"button for a short time and the steering wheel rotation will be stopped when the button is released.In addition,the corresponding information,such as the states of gear position and EPB(Electronic Parking Brake),will also be displayed on the instrument cluster in the process of RCD.
3.5 RCD Function of ROEWE
The operation method of RCD developed for ROEWE is controlled by the mobile terminal.The RCD function system of this car is also called RCS(Remote Control System). The driver can control the acceleration,deceleration and steering of the vehicle by the mobile phone outside the vehicle.When the RCD function is triggered,thevehiclespeed will belimited to 5 km/h.
3.6 Analysisof RCD Benchmarks
According to the summary of the above several vehicle benchmarks,it is concluded that the RCD function can be operated by either the intelligent touch key or the mobile terminal,such as mobile phone APP software.As shown in Table 1.This function is used to realize the vehicle’s maneuver of forward,backward and steering,etc.And the vehicle speed will be controlled less than a certain value.In addition,the realization of RCD function requires the configurations of the vehicle,such as electronic shift,electric power steering,remote control device,radar system,Multi-Media system,etc..Only with these configurations can the driver control the vehicle’s movement of forward and backward.
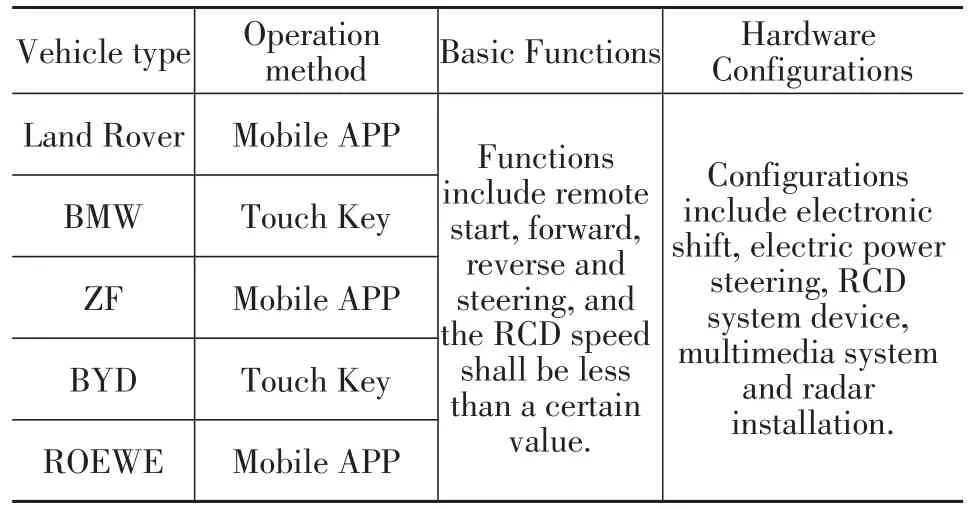
Table 1 RCDfunction benchmarks
4 Function Analysis of RCD of Electric Vehicle
4.1 Basic Functionsof RCD System
According to the benchmark results of the above vehicles,if the remote drive function is developed for a NEV,the basic functions shall be developed as shown in Fig.2.The functions include RCD enabling,power on and off,and vehicle forward,backward,braking and steering.
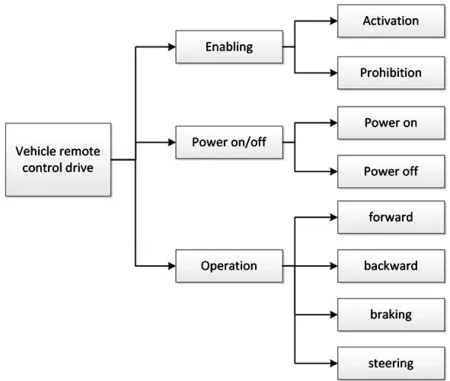
Fig.2 Basic function requirementsof RCD
4.2 Architecture Schemeof RCD System
The RCD system architecture is designed in a NEV,as shown in Fig.3.The implementation of RCD function requires the cooperation of each subsystem.There are many subsystems in the vehicle,such as VCU(Vehicle Control Unit),BCM(Body Control Module),SCU(Shift Control Unit),EPS(Electronic Power Steering),MCU(Motor Control Unit),ESP(Electronic Stability Program),IC(Instrument Cluster),EPS(Electronic Power Steering),PMM(Power Management),and radar.The control strategy and coordination methods of the vehicle can be carried out based on VCU(Vehicle Control Unit).

Fig.3 Architecturedesign of RCD
The way of mobile terminal connecting with the vehicle remote control communication module is through wireless,and then the demands of RCD shall be sent to VCU,VCU shall sent feedback signal to mobile terminal whether the vehicle status is normal or not.If the drive statuses are OK,the vehicle shall be controlled according to the RCD demands.VCU shall integrate the status of each subsystem,convert the remote control demands of the driver into the network communication signals and send them to the corresponding controllers.For example,VCU shall send a forward signal to MCU in order to control vehicle to drive ahead.VCU shall send a turning signal to EPS in order to control vehicle to turn in the relevant direction.VCU shall send a braking signal to ESPin order to control vehicle to brake slowly.
In order to realize the development of RCD function,VCU needs to be developed with corresponding control logic and software,including remote control strategy model,high-voltage power on and off strategy and vehicle speed closed-loop strategy,etc.Based on the demands of RCD and the signals sent by subsystems,VCU shall control the electric motor to drive the vehicle and send feedback the normal or abnormal information to the mobile terminal and instrument cluster.
4.3 Development of RCD System Strategies
In the development process of RCD function,a lot of driving statuses shall be judged,and the flow frame of function realization shall be determined,as shown in Fig.4.Firstly,it is necessary to establish a connection between the mobile terminal and the remote control communication module,and the distance between them should be less than a certain value,such as 10 m.Secondly,if the distance required is not met,the mobile terminal shall prompt the reason information to the driver.Thirdly,if the distance required is OK,the other driving statuses of the vehicle shall be judged.Fourthly,if all of the driving statuses are met,the RCD function shall be triggered by the mobile terminal,and the driving instructions shall be sent to VCU.Finally,VCU shall cooperatively control the forward/backward movement of the vehicle,or control the vehicle to turn left/right,or control the vehicle to brake according to the status of subsystems and the driver demands.
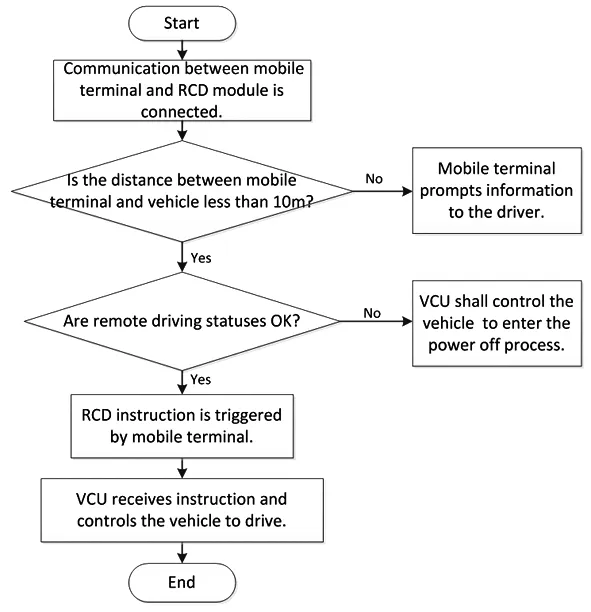
Fig.4 Flow chart of RCD function
The judgments of driving statuses in the process above include the anti-theft authentication of powertrain,power on/off,gear position,vehicle speed,EPB,etc.The remote control module shall determine whether all of these statuses are met or not.If all of these statuses are met,the remote control module shall send the driver's demands and instructions to VCU.Finally,VCU controls the vehicle to move according to the driver'sintentions.
5 Conclusions
In this paper,the RCD function can be used to improve driver’s perception,and it is also a technical solution for the development of extended functions for driving experience and safety.Because it has been applied in some vehicle types, other intelligent vehicle development in the future can also be integrated with RCD function.
In addition,it shall be paid more attention to other functions in the process of RCD development in the future.For example,the capacity of ramp passing is developed and improved through the closed-loop drive control of vehicle speed,the function of improving braking effect is developed based on ESP and EPB,the brake reminder function is triggered actively when encountering obstacles,and the systemis improved safely,etc.
The function of RCD is applied to provide better convenience for short distance maneuver for customers,and it also provides exciting driving experience for the electric vehicle powertrain.At present many companies are competing to develop intelligent vehicles.In the future advanced technologies,such as artificial intelligence interface and high level automated driving,will be used to bring mobility to smarter cities,which will benefit all mankind,including the vulnerable groups.
猜你喜欢
民间故事选刊(2022年13期)2022-07-18
好日子(2022年2期)2022-04-28
环球时报(2022-03-16)2022-03-16
语文世界(小学版)(2019年2期)2019-02-24
小猕猴智力画刊(2016年8期)2016-05-14
档案管理(2014年6期)2014-10-30
小天使·一年级语数英综合(2014年7期)2014-06-26
商品与质量·消费研究(2013年7期)2013-08-29
艺术评论(2013年12期)2013-03-15
环球时报(2012-03-28)2012-03-28