
地面激光雷达技术在铁路勘测中的应用
2020-12-26 02:54:38李海亮
铁道建筑技术 2020年10期
李海亮
(中铁第四勘察设计院集团有限公司 湖北武汉 430063)
1 引言
三维激光扫描技术(Terrestrial Laser Scanning,TLS)是测绘领域继GPS技术之后的又一次技术革命。不同于传统的单点测量方法,TLS具有高效率、高精度的独特优势[1],为建立物体的三维实体模型提供了一种全新的技术手段。
三维激光扫描技术广泛应用于隧道监测[2]、文物保护[3]、模型重建[4]等领域。近年来,激光雷达(LIDAR)技术在铁路勘测中应用越来越广,文献[5]分析了机载LIDAR相比传统航测技术在铁路勘测中的优势,提高了铁路勘测的速度以及自动化程度;文献[6]介绍了激光雷达在埃塞俄比亚铁路测绘中的应用;文献[7]介绍了激光雷达在铁路断面生产中的应用,提高了横纵断面的生产效率;文献[8]中介绍了激光雷达技术在昌景黄铁路断面测量中的应用,文中对LIDAR和RTK的断面结果做了对比分析。总的来说,LIDAR减少外业投入的同时也提高了勘测质量,具有一定的优势。文献[9]对比了传统方法、航测方法以及激光雷达方法在断面生产中的应用,突出了激光雷达方法的优势;文献[10]中利用车载激光雷达进行铁路线路复测,具有自动化程度高的特点;文献[11]利用激光雷达数据生产了铁路DEM、DOM、地形图及断面图,提高了铁路勘测设计的自动化强度。上述都是机载激光雷达在铁路勘测中的应用,机载激光雷达能较好地实现铁路勘测,但因其成本高和作业工期不固定,不适合小范围勘测。文献[12]利用激光雷达进行工点1∶500地形图测绘,具有精度高、安全系数高等特点;文献[13]提出了一种提高铁路车载激光雷达精度的方法,通过调节控制点的密度对点云进行精简,提高了铁路点云的精度。
本文根据铁路勘测特点,以及现有勘测方法存在的不足,提出了地面激光雷达数据获取和数据处理方案。将地面LIDAR应用于铁路勘测中,生产高精度地形图及断面图,并对其应用优势进行分析,突出了地面LIDAR在非接触式测量、数据多用性以及项目补测三个方面的优势。
2 地面激光雷达数据采集与内业数据处理
2.1 数据采集
在实际工程应用中,地面LIDAR主要通过引入外部参考的扫描方式进行数据采集,该方法通过利用全站仪测出标靶在外部坐标系的坐标,直接将每站扫描的点云数据配准到外部坐标系中。采集流程如图1所示。
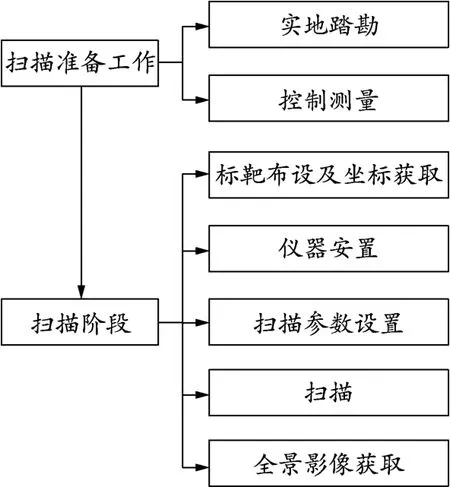
图1 地面LIDAR数据获取流程
2.2 点云数据处理
原始点云数据量非常大,包含大量的噪声以及空洞,无法直接使用,必须对点云数据进行预处理,主要包括点云的去噪、空洞修补、配准和压缩等。
(1)点云去噪
点云去噪一般采用双边滤波和人机交互式去噪方法,双边滤波利用点云邻域法向量信息滤除噪声信息,方法简单有效,拥有很快的速度,最重要的是该方法能保持点云的特征,具有很好的实用性;人机交互式去噪能滤除一些双边滤波算法不能滤除的噪声,让数据质量更高。
(2)点云配准
在实际工程项目中,由于测区大小、地形限制等因素,不可能从一个站点获得整个测区的点云数据,因此必须从不同的视角对测区进行扫描。如何将不同站点间的点云数据拼接起来是点云数据处理中的关键问题。在工程测量中,通过精确测量每站的标靶坐标,直接获得标靶的绝对坐标(如工程坐标系中的坐标)。配准时,各测站都直接转换到统一的绝对坐标系中,不存在多站坐标转换的传递误差,整体精度均匀。
3 地面LIDAR在铁路勘测中的应用及优势分析
3.1 非接触测量方式
在铁路勘测设计中,经常会遇到陡坡、悬崖等难以到达的工点,传统的接触测量方法需耗费大量人力物力,且效率低、安全性差;地面LIDAR作为非接触测量技术的代表,省去了跑棱镜、立尺等工作,特别适合复杂困难地区的铁路勘测设计。
3.2 数据的多用性
地面LIDAR可获得测区点云数据和全景影像数据,若后期项目方案有变化,只要还在数据扫描范围内就无需再次进场,提高了铁路勘测效率;扫描获得的数据可以同时生产断面、地形图等产品。具体流程如图2所示。
(1)断面测量
在铁路勘测设计中,需要大量断面用于设计、算量,传统测量需要耗费大量人力物力,自动化程度低。对于地面LIDAR而言,获取点云数据后,可根据需要自动切取纵、横断面,大大提高断面测量的精度、质量和效率。
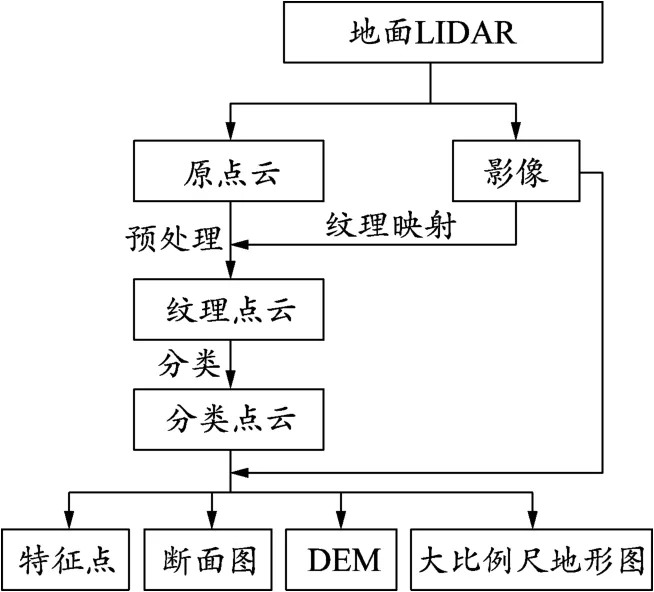
图2 地面LIDAR铁路应用流程
(2)大比例尺工点地形图测绘
地面点云密度大,基本能反映真实地表地貌,结合高精度正射影像图可以提取测区的特征点以及地物轮廓。同时利用RiScan Pro软件的自动滤波功能可以剔除非地貌的激光点云,自动生成高精度的DEM及高程数据;将高密度地貌激光点云导入到CASS软件中,利用CASS软件自动内插生成等高线,在山顶、地貌变换点及等高线的适当位置选取高程注记点,加快了大比例尺工点地形图的生产效率。
3.3 项目补测
在铁路勘测设计中,项目往往会涉及到补测的问题。航空摄影测量受空中管制,投入成本大;传统测量方法需要投入大量人力,效率低下,同时某些地区测量难度大,比如山区、林区等。利用地面LIDAR可以很好地解决这一问题,地面LIDAR不需要人工过多地干预,具有全天时、全天候的特点,在困难复杂地区也能正常使用,提高了铁路勘测的效率。
4 工程应用与分析
4.1 工程概况
赣深铁路(赣州至深圳铁路)北起江西省赣州市赣州西站,向南途经广东省河源、惠州、东莞、深圳市,终点接入深圳北站,新建正线全长436.37 km,是国家骨干干线——京九客运专线(京九高铁)的内地最南段部分。该线路对完善华南地区高速铁路网络,密切华南、华中、华东、粤赣地区经济联系,大幅缩短珠三角、长三角人员交通往来,有着极其重要的作用。
赣深铁路信丰段属丘陵地形,为了研究地面激光雷达在铁路勘测中的应用方法、验证精度和作业流程,在该工程中进行了应用试验。试验中分别根据地形特征和植被覆盖程度选择三个试验段,验证地面激光雷达的应用效果。
4.2 数据采集
在三个测区分别采用Riegl VZ2000通过多站扫描采集了测区的激光点云和全景影像。每一站扫描时,分别布设了反射靶标,并利用GPS RTK和全站仪测量了每个靶标在工程坐标系下的三维坐标。根据测区的范围和遮挡情况,测区一架设了两站,测区二架设了六站,测区三架设了四站。
4.3 数据处理
(1)点云定向
点云定向是指通过已知信息计算扫描仪的三维位置和姿态。本试验分别采用以下四种方法进行点云定向。定向完成后,通过反射靶标检查定向精度。
①采用4个以上靶标进行单站定向,定向精度为0.017 m。
②采用已知测站坐标和1个后视靶标定向,定向精度为0.025 m。
③定向一站后,其他测站自动拼接到已定向站上,定向精度为0.029 m。
④采用已知测站坐标多站联合平差进行定向,定向精度为0.015 m。
四种方法均能保证定向精度,方法①和④精度相对较高,但方法④要求不同测站要有同名地物和较大重叠度,否则难以保证定向成功。在铁路工点应用时,方法①最为稳健,多余观测值多,即使有部分点不可用,也可以采用方法②和③进行定向。
(2)点云去噪和植被滤除
利用RiScanPro软件和TerraSolid软件对点云进行去噪和植被滤除。
(3)点云高程精度评定
在三个测区分别采用外业实测的散点对激光雷达点云高程精度进行检查。本次共统计200个散点,包括地物点、植被地区的点、点云空洞处的点,平均误差为0.08 m,中误差为0.15 m,该精度满足铁路断面测量和1∶500地形图精度要求。在植被或者空洞处,激光点云高程和实测高程有一定的差距,主要是植被遮挡及内插错误导致,不能真实反映地表形态;对于其他地形,激光点云高程与实测高程相差不大,能真实反映地表形态。
(4)断面精度评定
为了验证激光雷达的断面精度,通过野外实测断面与点云生成的断面进行对比,如图3所示。
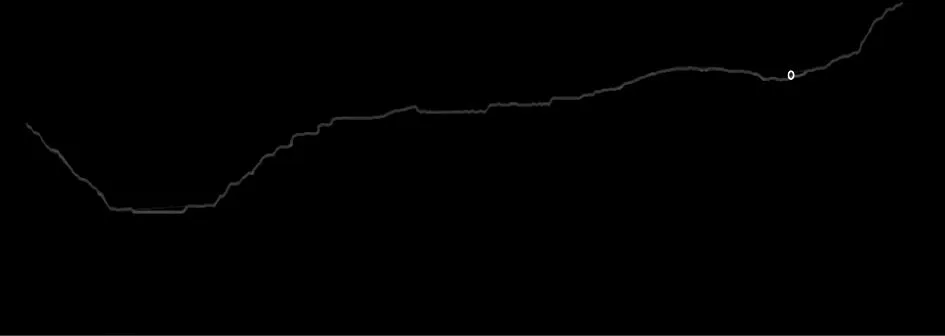
图3 野外实测断面和点云生成的断面对比
由图3可知,野外实测断面和点云生成的断面基本重合,大部分位置两条断面差距均在0.03 m以内,少数地形差距超过0.05 m,如图中圆圈处,该区域存在植被遮挡,地面激光雷达未能正确表达地表形态。
(5)地形图精度评定
为了验证地面激光雷达生产的1∶500地形图精度,在测区三实测了地形图检查点,如图4所示。

图4 激光雷达地形图
图4为点云数据生成的1∶500地形图,图4a为道路部分的放大图,图中的4个点为地形图检查点,与实测的高程相差不大,满足1∶500地形图的精度要求;图4b为测区的整体效果图,生成的等高线及地物均能满足铁路勘测的精度要求。
(6)效率评定
为验证地面激光雷达的工作效率,以三个测区的内外业时间作为指标进行定量评价。传统勘测方法内外业一起做,2人共需10 d时间;而地面激光雷达勘测方法同样是2人,外业仅需2 d时间,内业仅需1 d时间,总耗时3 d,效率提高三倍以上。
5 结论
LIDAR是一种新兴的测绘技术,广泛应用于铁路勘测中,文中重点分析了地面LIDAR技术在铁路勘测中的优越性。相对于机载LIDAR,地面LIDAR不受空中管制的限制,同时能应用于困难复杂地区勘测,具有更好的经济效益;相对于传统测量方法,地面LIDAR具有全天时、全天候、非接触测量的优点,具有很高的生产效率。本文以实际工程应用验证了地面LIDAR在铁路勘测设计中的高效性,在保证断面图及大比例尺工点地形图精度前提下,地面LIDAR勘测效率为传统方法的3倍以上。本文对地面LIDAR技术在铁路勘测设计中的应用具有借鉴意义。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
山东煤炭科技(2022年6期)2022-07-14 03:10:40
汽车观察(2021年8期)2021-09-01 10:12:41
建材发展导向(2021年13期)2021-07-28 07:15:16
河北地质(2021年4期)2021-03-08 01:59:14
河南水利年鉴(2020年0期)2020-06-09 05:43:58
中国铁道科学(2019年5期)2019-10-19 07:55:14
中国交通信息化(2019年1期)2019-03-26 06:43:46
测绘通报(2018年10期)2018-11-02 10:07:28
电子制作(2018年16期)2018-09-26 03:27:00
