
反辐射无人机对抗雷达诱饵阵方法研究
2020-12-25 02:27李陆军潘竟峰高洪波
雷达与对抗 2020年3期
潘 奎,李陆军,潘竟峰,高洪波
(空军预警学院 雷达士官学校,武汉 430019)
0 引 言
反辐射无人机是一种以电磁波导引的攻击地面雷达和其他无线电设备的新型武器,其原理与反辐射导弹相似,即利用目标雷达的电磁波作为制导信息,自动搜索并发现目标,进行主动攻击,实施摧毁。[1]雷达配备诱饵是对抗反辐射摧毁的一种有效方法。诱饵辐射信号与雷达信号在时域、空域、频域、能量域、码域、极化域中相近甚至重合。[2]常用对抗诱饵系统方法有3种[3-5]:复合制导技术、窄波束天线和高分辨测向。这些方法主要是通过提高导引头的测向精度和角度分辨力,使反辐射导引头尽早地分辨出雷达和诱饵。但是,复合制导技术实现难度较大,窄波束天线难以满足导引头视场要求,高分辨测向算法受无人机导引头大小限制,分辨力和测角精度不够。文献[6]提出了采用极化域-空域联合估计的算法,利用极化参数来鉴别雷达与诱饵,达到抗诱偏的目的。但是,有源诱偏系统诱偏模式多样,尤其是对于雷达配备多部闪烁诱饵,上述方法难以实现雷达与诱饵以及诱饵间的信号分选,对于已经定型的反辐射武器来讲实现难度更大。本文结合反辐射无人机与诱饵作战特点,从技术升级和战术运用的角度提出基于空间诱偏区和测向偏差角来分选出某一部诱饵的方法。
1 雷达诱饵诱偏机理分析
实际应用中,考虑到诱偏效果、诱饵安全以及成本等因素,有源诱饵的个数以3个为宜,即诱偏系统由1部被保护雷达和3个有源诱饵组成。[7-8]雷达诱饵通过接收雷达的激励信号及工作模式转变信号辐射出与雷达相同的诱饵信号,并能与雷达保持同步模式。
以脉冲压缩雷达为例,雷达与诱饵发射信号模型为[9]
(1)
以3部诱饵的诱偏系统为例(如图1所示),雷达诱饵k(k=1,2,3)与无人机导引头存在一定空间距离Rk:
(2)
其中,无人机空间坐标为A=[xyz]T,辐射源的空间坐标为D=[xkykzk]T。由于空间存在一定的传播距离,诱饵信号到达导引头时还存在信号传播延迟时间Δt1k:

图1 无人机与诱饵空间位置示意图
(3)
同时,雷达诱饵还可以控制发射时序,使不同诱饵相对雷达信号存在一定的时间延迟Δt2k。那么,第k部诱饵的信号到达导引头时相对雷达信号的总时间延迟Δtk为
Δtk=Δt1k+Δt2k
(4)
因此,导引头接收到的诱饵k(k=1,2,3)的信号为
(5)
其中,ω0为载频,τk为信号脉冲宽度,T0为信号重复频率。不同诱饵信号到达导引头时的传播时间差为
Δtij=|Δti-Δtj|,i=1,2,3;j=1,2,3;i≠j
(6)
通常,诱饵信号脉冲宽度τk比雷达信号τ0宽,而且诱饵信号脉冲前、后沿比雷达信号宽得多,宽度达几微秒,以保证诱饵信号更好地覆盖雷达信号。
导引头大多采用脉冲前沿采样跟踪体制[10]。它将对脉冲前沿靠前的诱饵信号进行采样处理。3诱饵诱偏系统能始终确保诱饵信号首先被导引头采样跟踪。
假设无人机被动雷达导引头前沿采样时间为Δμ。如果不同的诱饵信号到达导引头的时间差Δtij>Δμ时,诱饵将被导引头鉴别出来。如果通过控制雷达诱饵信号发射时序Δt1k,弥补空间距离差引起的传播时间差Δt2k,可以实现质心诱偏,如图2所示。

图2 质心诱偏示意图
对于质心诱偏,需要准确测出反辐射武器的空间位置,对抗无人机集群作战技术实施难度较大。通过控制雷达诱饵信号的发射时序,使雷达诱饵工作在同步闪烁模式。该模式实现相对容易,是诱饵的典型工作模式之一。它比恒功率诱饵更能对单脉冲雷达导引头实施有效的角度欺骗,达到显著的诱偏效果。[11]如图3所示,诱饵间存在严格的时间同步关系,按照时间间隔τ的依次交替领先。为确保雷达绝对安全,在任一时刻诱饵信号都“包裹”雷达信号同步辐射。[12]

图3 雷达诱饵的闪烁时序图
在闪烁模式下,前沿采样导引头只对最先到达的诱饵信号进行采样、测向。3诱饵交替靠前闪烁方式可以等效为3诱饵源周期性地交替发射诱偏信号(如图4所示)。在任意时刻等效为只有1个诱饵源辐射信号,其他诱饵信号可认为处于信号发射间歇期,即不发射信号。诱饵间的交替靠前时间间隔为τ,3部诱饵完成1次前沿交替靠前的时间为T=3τ,它也是诱饵系统的闪烁周期。
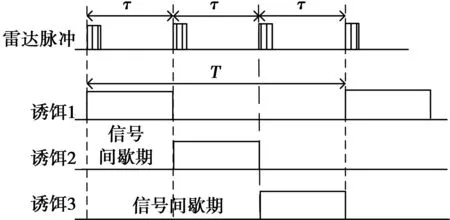
图4 诱饵同步闪烁时序简化图
假设t=0时刻,雷达诱饵开始工作,其闪烁时序为
(7)
其中,n=0,1,2,…;T=3τ。
2 导引头对诱饵的测角分析
比相体制导引头使用5个天线阵元构成相互垂直的两对干涉仪天线,分别位于导引头天线阵的方位面和俯仰面,其空间位置如图5所示。阵元天线在同一平面且呈长短基线分布。图5中,θx、θy和θz为目标视线(目标M与天线C0的连线)与Xp、Yp和Zp轴夹角。那么,目标来波方向在天线阵水平面OXPZP的投影OE与天线横轴的夹角α为方位面偏差角。目标来波方向在天线阵俯仰面OYPZP上投影OD与OP的夹角β为俯仰面偏差角。

图5 干涉仪天线空间位置(a)及角度关系(b)示意图
图6为导引头俯仰面天线子阵测向示意图。天线B1与C0组成短基线天线阵,d1、d2分别为短基线和长基线长度。
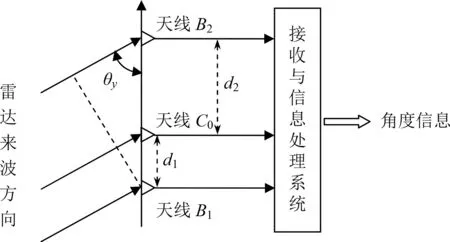
图6 俯仰面天线子阵测向示意图
因此,雷达来波方向与俯仰面、方位面天线子阵基线夹角分别为[13]
(8)
那么,目标雷达来波方向与天线轴线OXP的夹角θx:
(9)
因此,目标的方位偏差角和俯仰偏差角分别为
(10)
飞控系统按照测角采样周期间隔不断采样偏差角数据,控制无人机对目标进行横向和纵向跟踪。
3 反辐射无人机与诱饵阵对抗方法分析
假设ARUAV性能参数:飞行高度为2 000 m,导引头前沿采样时间为100 ns。[10]
诱偏系统参数:诱饵频率与雷达频率相同。3诱饵与雷达采用菱形布阵方式[14],相互间距为300 m,其空间坐标分别为:雷达(-260 m,0 m,0 m) 、诱饵1(0 m,0 m,150 m) 、诱饵 2(260 m,0 m,0 m) 和诱饵3(0 m,0 m,-150 m) 。
3.1 基于空间传播时间差的对抗方法分析
在飞行高度2 000 m、导引头前沿采样时间设为100 ns时,3诱饵信号在空间时差分布示意图如图7所示。图中细点、粗点和空白区分别为单诱饵信号区(Ⅰ、Ⅲ、Ⅴ)、双诱饵信号区(Ⅱ、Ⅳ、Ⅵ)和3诱饵信号区(Ⅶ)。在单诱饵诱偏区,其中1部诱饵与剩余两部诱饵信号到达导引头的时间差大于Δμ,存在单部诱饵暴露区;在双诱饵诱偏区,两部诱饵与剩余诱饵信号的到达时间差大于Δμ且两诱饵到达时间差小于Δμ,无人机在该区域受两部诱饵质心诱偏;在3诱饵诱偏区,3诱饵信号到达导引处的时间差均小于Δμ,无人机在该区域受3部诱饵质心诱偏。
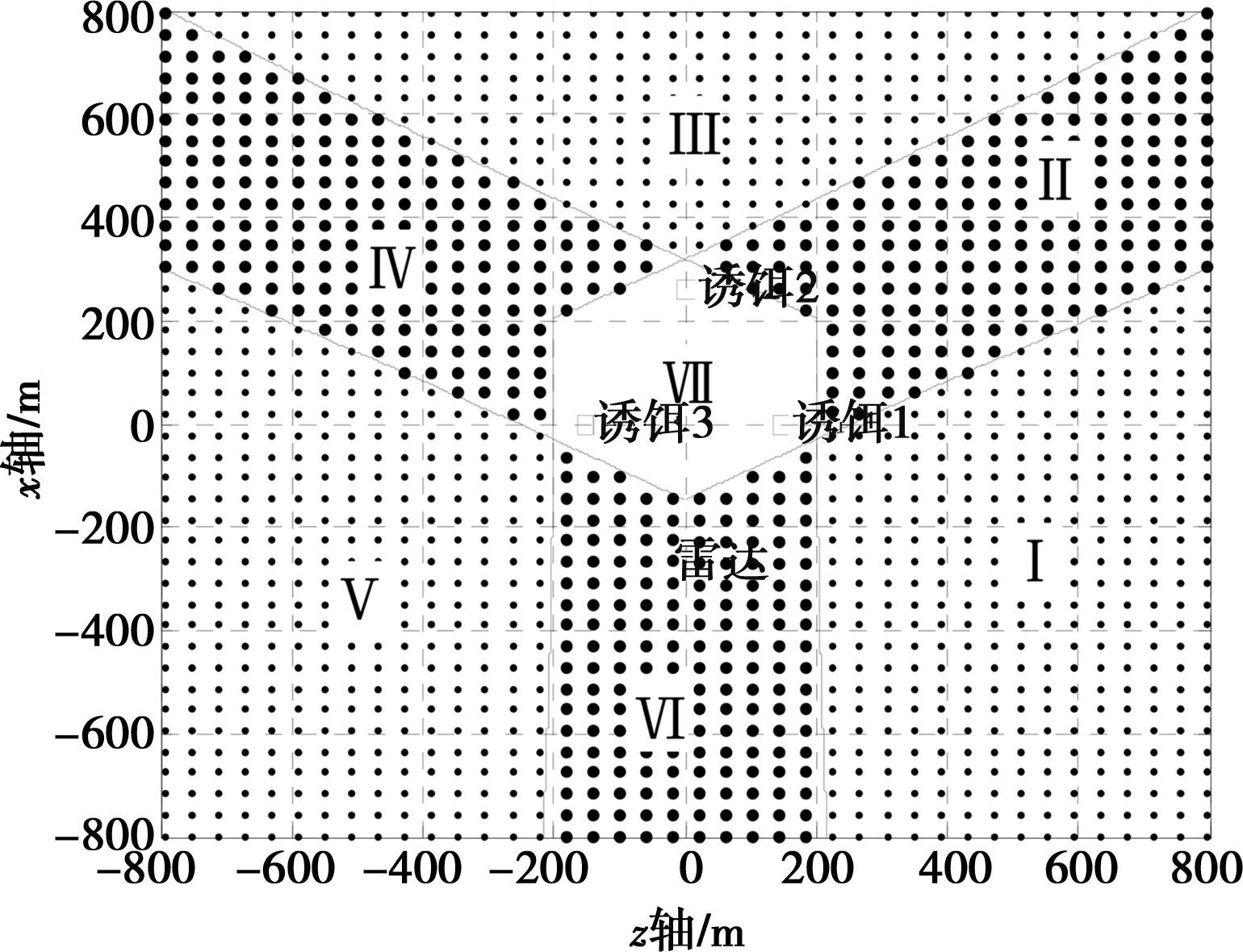
图7 3诱饵信号的空间时差分布图
因此,在该模式下研究ARUAV的攻击效能要重点考虑入侵角度因素的影响。在航迹规划上,可以采取互成直角的攻击方式,可以最大概率地确保某架反辐射无人机在单诱饵诱偏区域。如图8所示,入侵角分别为80°和-10°时ARUAV攻击航迹图。
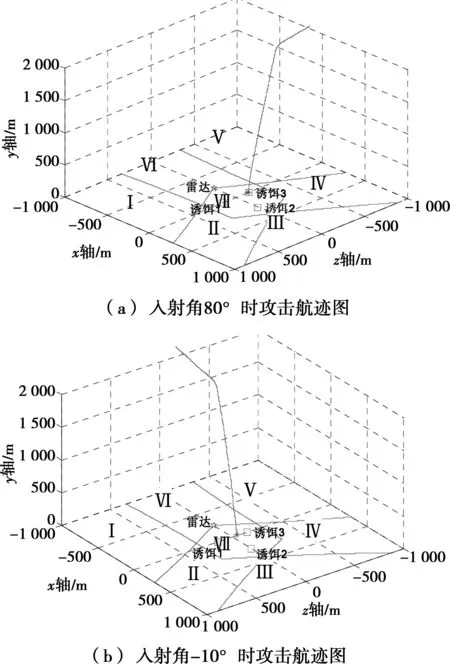
图8 前沿采样体制ARUAV攻击航迹图
分析图8可以看出,入侵角为80°时ARUAV使从单诱饵诱偏区域Ⅴ进入。该区域为单诱饵诱偏区。从该区域入侵的ARUAV只受诱饵3的诱偏,最终落在(-1.9,0,-148.2)处,命中诱饵3。入侵角为-10°时ARUAV从双诱饵诱偏区域Ⅵ进入。该区域为诱饵1和诱饵3的共同诱偏区。从该区域入侵的ARUAV将受诱饵1和诱饵3的合成场诱偏,最终落在(-12.4,0,-53.7)处。从落点位置看,无人机落点并不在诱饵1、3的中点处。这是由于在俯冲攻击末端某部诱饵脱离导引头天线视场而导致无人机最终攻击另一诱饵。[15]
3.2 基于发射时序时间差的对抗方法分析
假设雷达诱饵系统通过控制发射时序实现闪烁周期为1.5 s的闪烁诱偏。在ARUAV按照固定搜索路径飞行时,根据比相导引头天线阵测向原理,导引头天线方位面和俯仰面测向误差角角度变化情况如图9、图10所示。
由图9、图10可见,从数据跳变大小和方向可以明显判断出有3部诱饵,且采用周期闪烁模式。导引头信号处理系统通过不同时刻测角数据跳变关系和测角大小,可以测定诱饵系统的闪烁周期T。无人机飞控系统将按照导引头测向误差角数据适时调整攻击姿态。由于导引头天线数据在3诱饵间不断跳变,从而控制机体反复跟踪3诱饵,使整个攻击航迹呈现出追摆状态(航迹如图11所示),最终命中点(139.6,0,59.7),雷达及诱饵均安全。

图9 天线方位面偏差角变化曲线
图10 天线俯仰面偏差角变化曲线
图11 无人机在闪烁诱偏下的攻击航迹
因此,实时调整飞控系统的测角采样周期,使反辐射无人机末制导测角采样周期等于诱饵闪烁周期的整数倍(即Ts=nT)时,导引头上传给飞控系统的测向数据将会是某一诱饵的方向数据。飞控系统将会引导无人机始终跟踪该诱饵,直至命中。图12为当Ts=T,即末制导测角采样周期等于诱饵闪烁周期时,反辐射无人机的攻击航迹图。从仿真可以看出,在该条件下无人机能够稳定跟踪某一部诱饵,并最终命中。
图12 无人机航迹图(Ts=T)
因此, 通过测定诱饵闪烁周期,寻求末制导测角采样周期与诱饵闪烁周期间的最佳匹配值,然后通过修改飞控计算机与导引头的通信模块控制软件,使飞控系统有选择性地获取导引头的测向数据来实现对跟踪攻击的最佳控制。
4 结束语
本文在分析雷达诱饵系统诱偏机理的基础上分析诱饵信号传播时间差和发射时序差对反辐射无人机进行研究,得出了以下结论:(1)诱饵系统空间传播时间差使诱饵布阵出现单诱饵暴露区,采取互成直角的航迹规划方式来避免多诱饵质心干扰,可以最大概率地摧毁单诱饵暴露区的诱饵;(2)诱饵系统通过控制发射时序差来实现同步闪烁诱偏。反辐射无人机可根据测向偏差角数据的角度和大小特点识别出诱饵系统的闪烁周期。飞控系统按照闪烁周期间隔来采样测角数据可以实现对诱饵系统某一部诱饵的摧毁。
猜你喜欢
科普童话·神秘大侦探(2022年4期)2022-05-26
北京航空航天大学学报(2020年10期)2020-11-14
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
山东工业技术(2017年23期)2017-11-28
阅读与作文(小学低年级版)(2017年10期)2017-10-27
演艺科技(2017年8期)2017-09-25
公务员文萃(2015年9期)2015-09-29
软件导刊(2015年8期)2015-09-18
科技与创新(2015年17期)2015-09-11
