CH-3无人机航空物探磁放综合站应用系统设计与实现
2020-12-23 05:47闫东周乃恩
软件 2020年10期
关键词:无人机
闫东 周乃恩


摘 要: 为解决目前有人机航空物探所存在的作业效率低、成本费用高、危险性大以及缺乏灵活性等问题,本文提出了CH-3无人机航空物探磁放综合应用系统。研究设计了航磁水滴探头舱,并将其安装在磁场环境相对干净的翼尖,可以灵活地调节航磁探头使其保持与待测目的地磁场线垂直;研究设计了航放晶体箱,能够效减轻航放晶体在作业时的震动,并给航放晶体保温,防止其因温度变化过大而无法工作。借助于CH-3无人机本身续航時间长、挂载能力强、机动灵活等优势,同时搭载航磁设备及航放设备,使其具备超低空飞行、高精度地形跟随、夜航作业等能力。飞行试验表明,CH-3无人机航空物探磁放综合应用系统为我国区域地质调查增加了一种安全、高效、灵活、经济的航空物探勘查手段,具备了推广应用的基础。
关键词: 无人机;航空物探;磁放综合;超低空飞行
中图分类号: V279 文献标识码: B DOI:10.3969/j.issn.1003-6970.2020.10.029
本文著录格式:闫东,周乃恩. CH-3无人机航空物探磁放综合站应用系统设计与实现[J]. 软件,2020,41(10):120125
【Abstract】: An application system of CH-3 UAV aerogeophysical and magnetic amplifier integrated station is introduced. Maritime satellite communication equipment, aeromagnetic measurement equipment and aerial radiometric measurement equipment are added to the UAV flight platform. The antenna of the maritime satellite communication equipment is installed outside the skin of the UAV and is positioned directly above the payload cabin of the UAV flight platform; Maritime satellite is installed directly above the payload cabin of the UAV flight platform. The airborne equipment of satellite communication equipment is installed in the payload cabin. When the UAV flying platform is below 120 meters or the visual distance exceeds 200 km, the communication between the UAV flying platform and the ground station is realized by using the maritime satellite communication equipment. The aeromagnetic measuring equipment is installed in the payload cabin of the UAV flying platform and the UAV flying. The two ends of the wing of the platform are used to survey oil, gas and other minerals; the aerial radiometry equipment is installed in the load cabin to measure the content of radioactive elements in geological and mineral resources; and the bottom of the load cabin is made of non-metallic materials, which is directly in line with the aerial radiometry equipment.
【Key words】: UAV system; Aero-geophysical; Magnetic and radioactive system hedgehop
0 引言
目前航空物探以有人机为主要载体,然而近年来随着航空物探作业量的增加,航空物探作业飞机出现事故的概率也在增加;有人机对起降条件、地勤支持等要求很高,且无法在夜间和恶劣天气条件下开展航空物探作业,目前航空物探项目总经费超过65%用于租赁有人机,显而易见,危险性高、成本极高、灵活性差以及作业效率低等问题已经严重制约了航空物探的技术发展和大规模推广应用。随着无人机技术的发展成熟,无人机航空物探成为解决上述问题的有效途径,无人机具有效率高、成本低、风险小、不受地形条件及人为因素影响等优点,可以实现超低空安全飞行、夜航作业,能够更加快速、高效、高质量地获取航空物探数据。
1 国内外现状
无人机航空物探测量系统具有小型化、智能化、重量轻、尺寸小、费用低、续航能力强等特点,2000年前后,国际上多个发达国家开展了无人机航空物探装备技术的研发工作。加拿大Fugro航空测量公司于2004年推出了高精度无人机航磁测量系统Geo Ranger[1];澳大利亚于2006年3月在西澳进行了500 km无人机航磁测量试验测量,其飞行高度在500- 900 m之间[2];德国MGT公司于2010年研发了MGT-UAS(磁/电)系统[3];自2012年以来,日本发展了多款基于无人直升机和固定翼无人机的航磁、航重等系统;加拿大研发了Skydart无人直升机吊舱式航磁系统,该系统装配有铯光泵磁力仪,目前已用于商业飞行服务[4]。总之,国外无人机航磁技术较成熟,多采用高精度铯光泵磁力仪搭载在固定翼无人机上。
而国内相关研究很少,无人机应用刚刚起步。中国国土资源航空物探遥感中心曾立项研制无人机航磁系统;中国科学院于2009年10月试飞了无人机航磁系统;航天十一院自2011年起受中国地质调查局的委托,开始使用彩虹系列无人机进行航空电磁探测和航放测量仪器的搭载研究和测试试验,取得了初步的成功;2015年5月,中国地质调查局在河北保定对“固定翼无人机航磁探测系统研制”课题在2010-2012年的研發成果进行了结题验收[5-7]。
2 系统方案
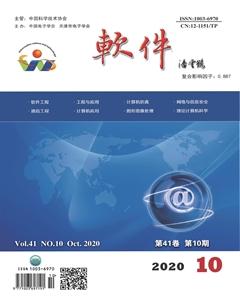
本文所提出的CH-3无人机航空物探磁放综合站应用系统主要由无人机平台分系统、磁放综合分系统和测控通信分系统组成。其中,磁放综合分系统由航磁子系统和航放子系统构成,无人机平台分系统由结构、动力、电气、燃油、导航、飞控、起落架等子系
统构成,测控通信分系统由视距通信子系统和海事卫星通信子系统构成。如图1所示,无人机飞行平台同时为海事卫星测量设备、航磁设备和航放设备供电,并与航磁设备和航放设备实现相互通信;航磁设备主要包括磁通门、航磁探头、前置放大器和磁力仪。航磁探头及前置放大器获取大地磁场的拉莫尔频率数据,并通过前置放大器传输至磁力仪,磁通门获取无人机飞行平台的飞行姿态数据并传输至磁力仪,磁力仪根据飞行姿态数据对拉莫尔频率数据进行补偿;航放设备主要包括航放主机和晶体箱,晶体箱接收地质矿产中放射性元素数据,航放主机记录存储航放探测晶体采集的数据;地面站用于上传对无人机平台及磁放综合系统的控制数据以及下传磁放综合站记录的数据。无人机平台同时搭载航磁设备和航放设备开展航空物探作业,航磁设备用于普查石油和天然气以及其他矿产;航放设备用于测量地质矿产中放射性元素的含量。
3 系统设计与实现
3.1 无人机磁本底测试
由于航磁设备具有高灵敏度、大梯度适应性、响应速度快等特性。为了保证航磁设备的测量精度,必须优选航磁设备的安装位置,安装位置附近尽可能远离运动表面或导磁体,并确保所有接近航磁探头的物体没有磁化污染,尽可能减少导电体(如黄铜螺丝和铝),避免在地磁场中运动时二次场的激发。
如图2所示,对CH-3无人机的静态磁场分布进行了测量,可以明显看出,干扰磁场的梯度最大值位于无人机轴线上,梯度值向两翼方向逐渐减小。P1和P0位置结构强度均满足安装要求,但P1处距离机身更远,据此将航磁探头选在机翼翼尖位置,使磁敏感部件最大限度地远离噪声源。
3.2 航磁探头舱设计
航磁设备中的航磁探头位置需要与待测目的地磁场线垂直,且航磁探头外形对飞行性能影响较大,因此本文提出了航磁探头舱的设计,航磁探头舱采用水滴探头舱,根据安装空间及安装距离的要求,首先设计了航磁探头舱的气动外形,航磁探头舱在攻角3°、侧滑角15°、速度50 m/s的情况的流场如图3所示。探头舱带来的气动阻力增加为全机的1.9%,探头舱整流效果较好。
3.3 航放晶体箱设计
为了满足航放晶体的特殊安装要求,本文采用航放晶体箱设计,实现对航放晶体的减震与隔热设计。如图4所示,航放晶体置于海绵内,两端由固定器固定,海绵可以有效减轻航放晶体在作业时的震动,并给航放晶体保温,防止其因温度变化过大而无法工作;固定器、电路板、挡板和航放晶体连接在一起,组成航放晶体供电及数据传输模块;电线及网线穿过海绵为晶体供电并将航放晶体所测出的数据传送到无人机上;放晶体箱外壳材料为玻璃钢纤维,并采用蜂窝式结构,与其他材料相比在减轻重量的同时增大了结构强度与抗冲击性能。
3.4 系统集成安装
3.4.1 航磁设备集成
航磁测量设备包括磁力仪、航磁探头舱、磁通门和前置放大器,航磁探头舱内安装航磁探头。根据CH-3无人机静态磁场分布,将不受电磁环境影响的磁力仪通过支架连接安装在载荷舱内加强框上;将对电磁环境敏感的航磁探头舱固定安装在无人机飞行平台的机翼两端;磁通门安装在无人机飞行平台机翼垂尾底端,前置放大器安装在无人机飞行平台的机翼内部靠近翼尖位置,前置放大器与磁通门相连,并在相应位置的机翼下方蒙皮开口,磁通门和前置放大器安装配件均选用无磁性材料。
3.4.2 航放设备集成
如图5所示,航放测量设备包括航放主机和晶体箱,航放主机和晶体箱采用减震安装在载荷舱内。晶体箱外壳材料为纤维玻璃钢,并采用蜂窝结构构成,晶体箱内的航放探测晶体两端固定后填充海绵,为航放探测晶体供电的电路板上的电线通过海绵内部连结在航放探测晶体上,晶体箱安装在磁力仪下方通过耳片连接在载荷舱加强框上;与晶体箱正对的载荷舱底部采用非金属的材料;航放探测晶体越多,航放测量精度越高,本文以3条航放探测晶体为例,如需增加航放探测晶体数量,需增设挡板及固定装置;航放主机记录存储磁放探测晶体采集的伽马射线数据,用于测量地质矿产中放射性元素的含量。
4 实现
4.1 气动试验
由于航磁探头舱通过探杆安装在机翼两端,对飞行性能造成了一定的影响,为了保证飞行安全性,本文开展了如下气动分析分析计算。
应用系统外形气动性能模拟基于N-S方程,采用多块结构网格。如图6所示,分别为不带航磁设备的CH3无人机外形表面网格、带航磁外形表面网格以及航磁设备的局部网格。可知,无人机不带航磁设备外形与带航磁设备外形模拟参数相同,挂载航磁设备不会对无人机操稳特性及结构带来安全性影响。
无人机模拟高度h=500 m,速度V=50 m/s,攻角=0,3,6、=0,5,15,参考面积S=9.44 m2,参考长度L=1.519 m,力矩参考点为无人机头部顶点,计算参数及结果见表1所示(对比模型为不带航磁设备的CH-3无人机)。