
自动化立体仓库堆垛机的控制与设计研究
2020-12-21 03:44蒙重宝
科技风 2020年34期

摘 要:在自动化立体仓库中,堆垛机作为一个不可或缺的核心设备,其工作效率与稳定性,对于立体仓库的使用性能而言,能够起到直接的重大影响;本文关于自动化立体仓库堆垛机的控制与设计研究,介绍堆垛机的相关概念:堆垛机的工作原理、基本功能与其他功能、堆垛机控制的功能等,主要进行自动化立体仓库堆垛机控制系统的设计;希望可以为自动化立体仓库堆垛机控制系统的技术发展,提供一定的参考。
关键词:自动化立体仓库;堆垛机;控制系统;设计
自动化立体仓库,采用的是一个具备了几层、十几层、几十层等不同规格的货架,来进行单元式的货物储存,并且还利用了一系列的物料搬运设备,例如,堆垛机、输送机、LGV等,来进行货物的出入库作业;接下来,我们就对其中最为核心的堆垛机设备,进行相应的介绍与说明。
1 堆垛机的相关概念
1.1 堆垛机的工作原理
在立体仓库中,设置的有两条巷道、两台堆垛机、四排高层货架;其中每排货架都是9列14层的,而且每个货格都设置的有两个托盘位,一共有1008个托盘位;在巷道中的堆垛机,都是由行走电机,采用驱动轴的方式来带动车轮,以此在导轨上进行水平移动;以及利用提升电机的钢丝绳,来带动载货台,以此作垂直的升降移动;堆垛机工作原理,就是采用以上的几种三维运动方式,来进行货位的取出与送入;其中,行走的认址器、提升的认址器,是用于控制堆垛机的水平行走位置,与载货台的升降位置的,而且在货叉方向,可以采用相应的接近开关定位。
1.2 堆垛机控制的功能
(1)通讯功能:保持堆垛机与上位机以及其他仓库设备之间的通讯;
(2)三维动作控制:控制堆垛机做水平、垂直、左右等方向上的运动;
(3)位置控制;控制堆垛机以合理的速度进行移动,并且开展精确的定位;
(4)保护功能:为堆垛机提供各种电气与机械保护,让其在进行频繁的高速运动时,不易有安全事故的发生,以此确保堆垛机的安全使用。
2 自动化立体仓库堆垛机的控制与设计
2.1 控制系统的构成
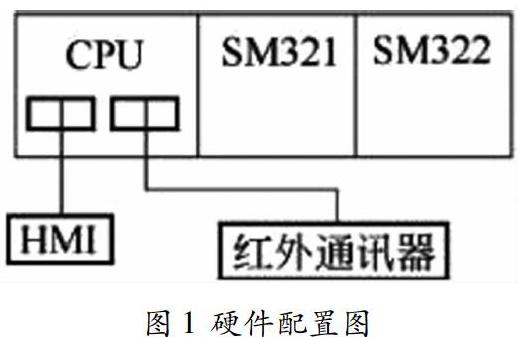
堆垛机的控制核心,一共有两种方式:一是以单片机形式来控制,二是以可编程控制器为主来进行控制;本此设计的自动控制系统,采用的是S7-300PLC,并且因为考虑到CPU与HM I、CPU、上位机等之间的通讯问题。所以,就至少需要使用2个通讯端口;除此之外,还选择得有6ES7 321-lBL0O-0AA0、6ES7 322-lBL00-0AA0的输入、输出模块;同时,还要在CPU中,设置2个通讯接口,以便采取多种通讯模式才可进行;因此,在本此控制系统的设计中,采用的是一种自由口的模式,选取了PortI、HM等的通讯;其中,Por2将负责与红外通讯器之间来进行通讯;而自由口的通讯,建立于RS485的硬件基础上,一种具备很多特色是通讯方式;在自由口的通讯过程中,用户能够对于通讯协议,进行一些简单定义的设置;例如:数据长度、奇偶校验等,还能够让用户进行的通讯功能程序的完全控制。
此外,选用OP3的操作面板,不仅是因为它在功能的使用上面,十分的简单,而且在利用PROTOOL软件来进行编辑时、或者是在进行现场操作的时候,都具有很大的便利性;为了能够充分满足,移动设备与上位机间通讯的需要,在一般情况下,都会在工业现场,使用这三种解决方案,它们分别为红外器通讯、滑触线通讯、无线射频通讯;但又因必须考虑以下的因素:一是因为在经过长期通讯之后,滑触线中的碳刷受到了一定程度的磨损,从而会导致对于通讯效果的影响;二是出于对经济性的考虑,因为购买无线射频通讯器的价钱,远超于购买红外通讯器所花的金额;三是因為在本次设计中,其立体仓库设置为冷藏库,所以,在其现场就不会有的油粉尘等的严重污染,对于其通讯效果也不会产生什么干扰性的影响;因此,在最终的决定,采用的是红外通讯的方式,图1就是该方式下的控制系统的硬件配置图。
2.2 系统工作的原理
①定位检测。当堆垛机中的可编程控制器,一旦收到来自操作面板与上位机,发出的存取的信号与地址之后,便会向指定方向的货位,运行;而认址定位技术,就是确保堆垛机开展精准运行的关键;目前,认址技术有旋转编码器认址、光电传感器认址、激光测距认址等;而在本次的控制系统设计中,使用的便是光电传感器认址;因为它不仅能够较为简单的就实现准确的堆垛机运行,而且还有单光电认址与双光电认址,最重要的是其价格也比较合适。
在图2所示的取货认址示意图中,U型光电的开关,由PH1、PH2、PH3来分别表示;而且它们都被安装于堆垛机中,垂直运行的载货台上,能够跟着载货台,进行上下的运行;其中,认址片则固定于堆垛机的立柱上;当堆垛机在进行作业时,取货高度与放货高度是一样的,因为不同货物,都是摆放于各个不同货格的不同托盘中,而且在取货时,货叉由必须与每层的货格台面,保持一定的齐平,好让货叉能够伸入托盘的凹槽中完成取货;除此之外,在PLC程序中,还需设置C1、C2、C3等3个计数器,来对分别应光,电开关中的PH1、PH2、PH3;其中,对于PH3的光电开关来说,一旦其被认址片遮挡1次,计数器的C3就会进行1次计数,其中计数的规则为:上升一次就加1,下降一次就减1;在图2中,表示的是整个PH2的认址状态和过程;由图2可知,从(a)到(b),就表明PH2进行了1次认址,而计数器C2也就需要加1;当取货时,要想获取目标层的地址,就需将计数器C1与C2的数值之合,除以2得到的。
②变频驱动。在仓库里进行货物的存取工作时,可以根据目标地址距离的具体情况,控制其万能开关,将货物置于水平方向,进行前进与后退的移动;其中,又包括了高速、中速、低速等挡位的行径等级划分。与此同时,也可利用另外的万能开关,将货物做垂直方向上的上升高速、上升低速、下降高速、下降低速等4个挡位的运行。
在工作时,变频器需要,依靠传感器的信号检测来进行状态;而且电机只会进行速度给定,不会反馈速度的具体数值;因此,开环系统要想达到一定的精度,最关键的一步,便是要对传感器,进行准确的定位检测;在目标货格的前个货格中,便要开始采取换速,因为此时的变频器,其输出频率已经在逐渐地降低了;当堆垛机在低速运行时,可明显看出因为其惯性较小,所以其传感器的检测也非常的准确,能够较好的满足精度定位的要求。
电机1有3种速度:1速、2速、3速,而且都可以进行单独的设定;与此同时,还能够在变频器中,进行4、5、6、7等这4种的选择设置;由于在变频器的速度输入中,只有3个端子;因此,得利用PLC的输出点,对变频器进行控制;例如,将1速与2速、1速与3速、2速与3速、1速与2速与3速等组合,以此来构成4速、5速、6速、7速,方便电机2中4个速度的启用。
3 结语
在我国物流行业与生产行业的迅速发展之下,自动化立体仓库的功能要求与数量需求也在不断地增长;为满足我国物流与生产事业的平稳化、智能化的发展趋势,也必须不断提高自动化立体仓库的设计水平与堆垛机的技术;本文介绍了堆垛机的相关概念,其中包括堆垛机的工作原理、基本功能与其他功能、堆垛机控制的功能:通讯功能、三维动作控制、位置控制、保护功能、人机界面;主要进行自动化立体仓库堆垛机控制系统的设计。希望可以为自动化立体仓库堆垛机控制系统的技术发展,提供一定的参考。
参考文献:
[1]刘昌棋,董良.自动化立体仓库没计[M].机械二业出版社,2007.
[2]汪国春.自动化立体仓库堆垛机控制系统的设计[J].起重运输机械,2008.
[3]码占营.基于PLC的自动化立体仓库运行系统设计[D].山东大学,2018(03).
[4]黄学飞.中小型自动化立体仓库的智能管理控制系统研制[D].浙江大学,2017(08).
基金项目:2019年度广西壮族自治区中青年教师基础能力提升项目《一种遥控高层立体存垛库的研究与实验》(项目编号:2019KY1660)
作者简介:蒙重宝(1984—),男,壮族,广西崇左人,硕士,讲师,研究方向:机械设计与制造。
猜你喜欢
中国品牌(2020年11期)2020-12-23
Coco薇(2017年5期)2017-06-05
艺术评论(2016年10期)2016-11-28
考试周刊(2016年88期)2016-11-24
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
Coco薇(2015年12期)2015-12-10
科技视界(2015年25期)2015-09-01
体育教学(2009年11期)2009-07-14
舒适广告(2008年9期)2008-09-22
