无人作战飞机测控与信息传输系统风险评估
2020-12-21 08:47吴景泰张依宁
中国新技术新产品 2020年20期
吴景泰 张依宁
(沈阳航空航天大学,辽宁 沈阳 110136)
0 引言
无人作战飞机(以下简称无人机)的测控与信息传输系统是实现地面测控站和无人机之间信息传输的系统,传输信息中断或被篡改时,会导致无人机飞行不受控制,无人机坠毁或遵循敌方旨意等问题,最终导致作战任务失败。无人机测控与信息传输系统对于无人机核心功能的实现起决定性作用。
1 风险识别
无人机测控与信息传输系统风险类型很多,主要分为5类。
1.1 链路风险
其分为来自自方的无意和敌方的有意的链路干扰风险,指令的产生到无人机系统做出相应动作的时间较长,导致链路时延风险,飞行距离已经超出测控站的无线电的视距范围的链路作用距离风险。
1.2 管理风险
其分为组成无人机的小型电子设备产生的电磁辐射相互作用的电磁兼容风险[1]。多数据链同时使用时,当一条数据链由于错误的管理发生故障,整个系统瘫痪的多数据链管理风险[1]。战场组网时,需要对不同型号的无人机或其他装备进行连接,但各类装备的调制方案和传输速率可能各不相同,导致信息传输效率降低,甚至无法通信的通信系统兼容风险。
1.3 设备风险
其分为系统出现故障时没有预留故障检测点,很难判断具体故障部件,无法及时精确维修的设备自检风险[1]。在执行任务时遇到故障,无法依靠自身编程指令来处理复杂多变的情况的设备自控风险。
1.4 人员风险
其是指控制员操作无人机飞行姿态,控制任务载荷获取图像或完成复杂多变的作战任务时,临时判断失误导致的操作错误,任务失败的风险。
1.5 环境风险
其是指无人机的使用时可能会遭受自然衰落和噪声、雷达和卫星分布不均、山区中通信信号不流畅、机载设备持续高温和震动、暴风雨雪和大雾等恶劣条件的风险。
2 基于FCM模糊认知图的风险评估
FCM 模糊认知图可以描绘风险之间的非线性耦合关系,能够清晰的呈现各个风险因子之间的相互作用,运用该方法可以对识别出来的风险进行定量评价。首先建立风险因子相互作用框图,将识别出的5 类风险因子作为概念节点C1、C2、C3、C4、C5,C6为目标风险即无人机测控与信息传输系统发生故障。该文建立了一个由5 位无人机方面的专家组成的专家小组,根据经验和知识确定各个风险因子之间的相互作用关系构成框图,如图1 所示。
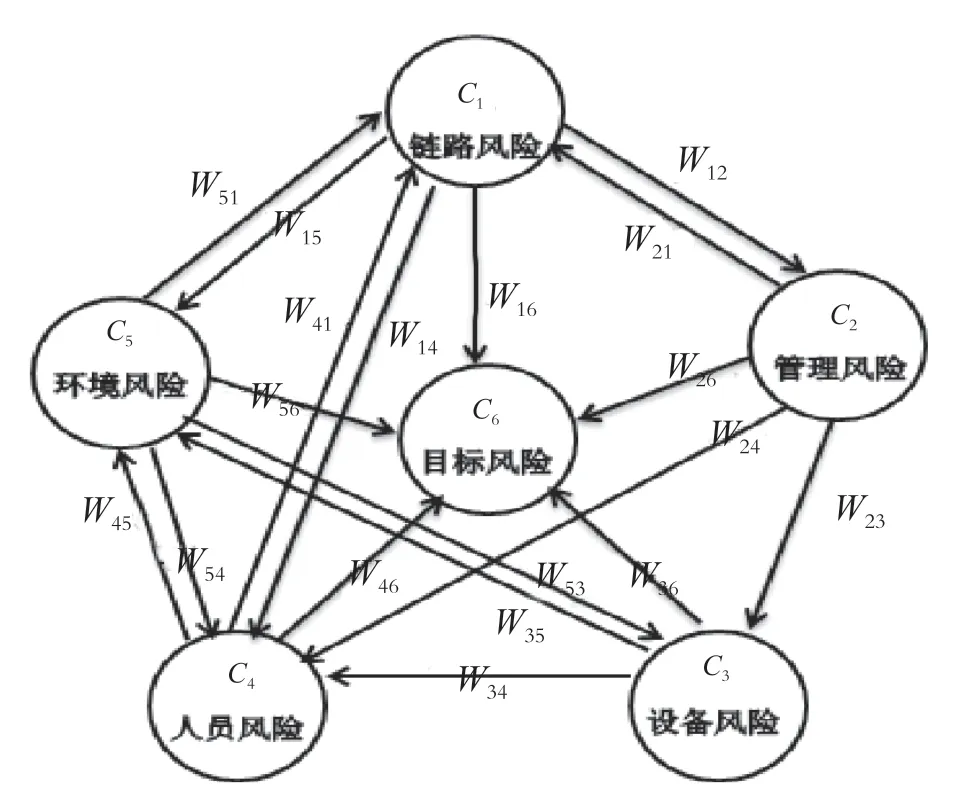
图1 无人机测控与信息传输系统风险因子相互作用框图
邻接矩阵的确定是5 位专家用模糊语言反应概念节点之间的因果关系的模糊程度,即风险因子相互作用程度(见表1)。Wij表示第i 个风险对第j 个风险影响程度,Wij∈[0,1],没有相互作用的风险因子Wij=0。该文将模糊语言分为5 个部分,每个模糊语言有对应一个隶属度(下限lk,中限mk,上限uk),分别为:很低VL(0.0,0.1,0.2),低L(0.1,0.3,0.5),中等M(0.3,0.5,0.7),高H(0.5,0.7,0.9),很高VH(0.8,0.9,1.0)。
每个专家的可信度权重为αk,风险影响程度加权平均和,如公式(1)所示。


式中:n为概念节点数量。将表1 的结果经过处理,建立矩阵,即为邻接矩阵W,结果如公式(2)所示。


表1 专家对风险因子相互作用程度的评价结果
确定初始状态向量时,初始状态同样由5 位专家给出(见表2)。

表2 专家对风险因子初始状态值的评价结果
将表2 结果通过加权平均法综合,根据最大隶属度平均法去模糊化处理,得到各概念的初始状态值C(t0),结果如下:

最后运用MATLAB 软件迭代计算概念状态值,每个概念初始状态向量和邻接矩阵相乘得到输出结果,这个结果继续与邻接矩阵相乘,持续迭代下去,直到每个概念的状态值稳定不变,第1 次以及第k 次的迭代计算如公式(3)、公式(4)所示。
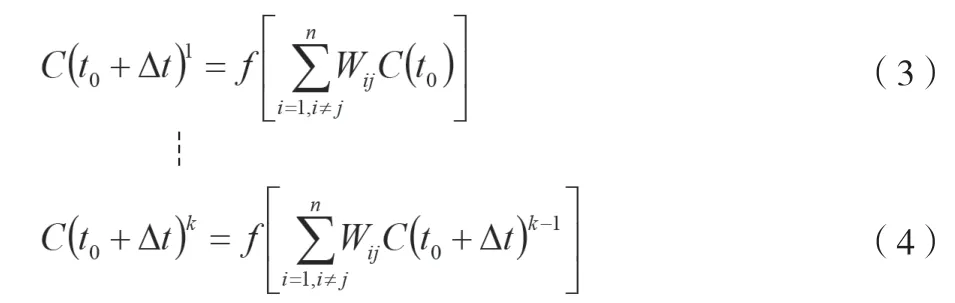
式(3)、式(4)中,Wij为概念节点相互作用准确值,为各概念的初始状态值,为第一次迭代计算得到的概念状态值…为第k次迭代计算得到的概念状态值,f为阈值函数。在进行迭代计算时,为了保证节点的状态值在[0,1]之间,需要添加阈值函数
Sigmoid 函数[2]:

式(5)中,x为计算得到的节点概念状态值。式(4)的输出结果只保留4 位小数,稳定的状态值如表3 所示。

表3 MATLAB 迭代计算节点概念状态值结果
3 灰色关联度计算
灰色关联度用来计算风险因素与目标风险的关联度,确定导致系统故障的最主要风险。依据表3 中C1、C2、…、C5风险中的某一个或者几个因素会在某种程度上引起目标风险C6。将目标风险C6迭代结果的所有状态值作为参考序列,记为C6(k)。将概念节点状态值作为比较序列,分别记为C1(k)、C2(k)、…、C5(k),其中比较序列和参考序列的关联系数φ 是,如公式(6)所示。
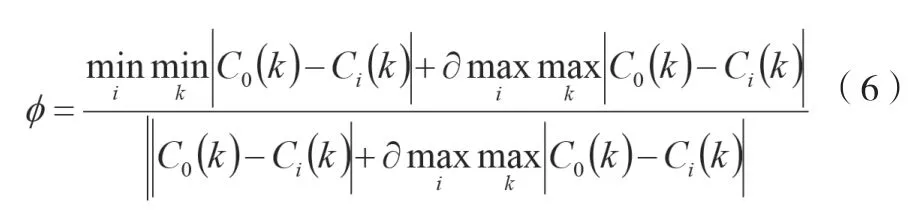
式中:k为迭代次数,i为概念节点,为分辨率系数,通常取0.5。序列和序列的关联度计算公式如下[3]。

式(7)中 的k同 式(6)。计 算 得γ1=2.2736,γ2=1.6901,γ3=1.7985,γ4=1.9883,γ5=1.8962,γ1>γ4>γ5>γ3>γ2,γ1值最大。
4 结语
该文对无人机的测控与信息传输系统风险影响因素进行识别,利用FCM 模糊认知图方法计算风险稳定值,利用灰色关联度的方法计算5 个风险因子与目标风险的关联度识别风险发生的概率。研究得知,链路风险导致无人机发生事故的概率最大,应进一步对链路风险进行详细分析,对链路风险严加防控。
猜你喜欢
交通运输系统工程与信息(2020年4期)2020-09-01
电子测试(2018年22期)2018-12-19
水利科技与经济(2017年12期)2017-04-22
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
计算机应用(2016年6期)2016-06-28
电源技术(2015年11期)2015-08-22
电子设计工程(2015年3期)2015-02-27
吉林大学学报(理学版)(2014年5期)2014-09-06
河南科技(2014年16期)2014-02-27