
潜艇隐身技术分析
2020-12-19 06:16闫大海苗金林杨晓刚
舰船科学技术 2020年11期
闫大海,张 晗,苗金林,杨晓刚
(中国舰船研究院,北京 100101)
0 引 言
潜艇的优势在于隐蔽性。潜艇隐身技术主要研究如何降低潜艇产生的声、热、磁、尾迹等目标特征,运用各种技术手段,降低被敌方发现和识别的概率,减少以特征信号为引信的制导武器的命中概率,提高潜艇的生命力和作战效能。潜艇隐身技术涵盖设计、建造、测试、使用全过程,涉及潜艇总体、系统、设备,结构、材料、工艺,以及力学、声学、电磁学等诸多领域。
1 探测潜艇的主要手段
目前探测潜艇的主要手段是声波,其他手段包括雷达、红外、电磁场、尾迹等。探测方式包括主动探测和被动探测,探测载体包括卫星、飞机、舰艇等。对潜攻击武器主要包括鱼雷、水雷和深弹等,反潜武器制导手段主要是惯导、声、红外、磁、尾流等。
1.1 声 波
电磁波等信号在水下衰减很快,传递距离很短。声波可以在水中传播数十至上千海里,是水下探测中应用最多、技术最为成熟的手段。水声探测和攻击手段主要包括网络化水声探测、各种声呐、声制导和声引信鱼雷、水雷、深水炸弹等。
1.1.1 网络化水声探测
一般使用低频大功率大尺寸基阵进行网络化水声探测,可大范围布放,探测监视距离远,隐蔽性好,局部损坏不会中断整个系统工作。美国从20 世纪50 年代就开始建设水声监视系统SOSUS,到了20 世纪80 年代后期,已几乎可以监控整个大西洋和太平洋。随后,美国又开发了固定式分布系统(FDS)、先进可布放系统(ADS)、自主式分布传感器系统(DADS)和拖曳阵传感器监视系统/低频主动式拖曳阵列传感器监视系统(SURTASS/LFA)等。
1.1.2 声呐
声呐是利用声波对水下目标进行探测、定位和通信的电子设备,其工作频率逐步向低频、宽带和大功率方向发展,定位精度、探测距离、智能化识别功能不断提高[1]。
声呐主要包括首阵、舷侧阵、拖曳阵、吊放声呐及浮标等。各型声呐主要技术特征见表1。

表1 各型声呐主要技术特征Tab.1 Main technical features of various types of sonar
首阵一般是安装在潜艇首部或水面舰艇球鼻首部的声呐阵列,按阵形一般分为球阵、圆柱阵和共形阵。采用主被动工作方式,工作频段覆盖高中低频,具有视野开阔、受主机和螺旋桨影响小的特点。潜艇首阵声呐具有警戒、定位、识别、跟踪、主动测距、通信等功能,是潜艇声呐系统中功能最完整,最重要的声呐设备[2]。
舷侧阵布放于舰艇两舷侧,充分利用艇体长度,可在低频段(1000 Hz 以下)工作,采用主被动工作方式,一般探测距离从十几千米到几十千米。
拖曳阵一般装备于舰艇、反潜直升机和监视船上,一般长1~2 km,斜向下深入水中,一般采用被动工作方式,主要工作在低频和甚低频,作用距离最远可达200 km 左右。图1 为美“弗吉尼亚”核潜艇TB-29A 细线拖曳阵声呐工作示意图。
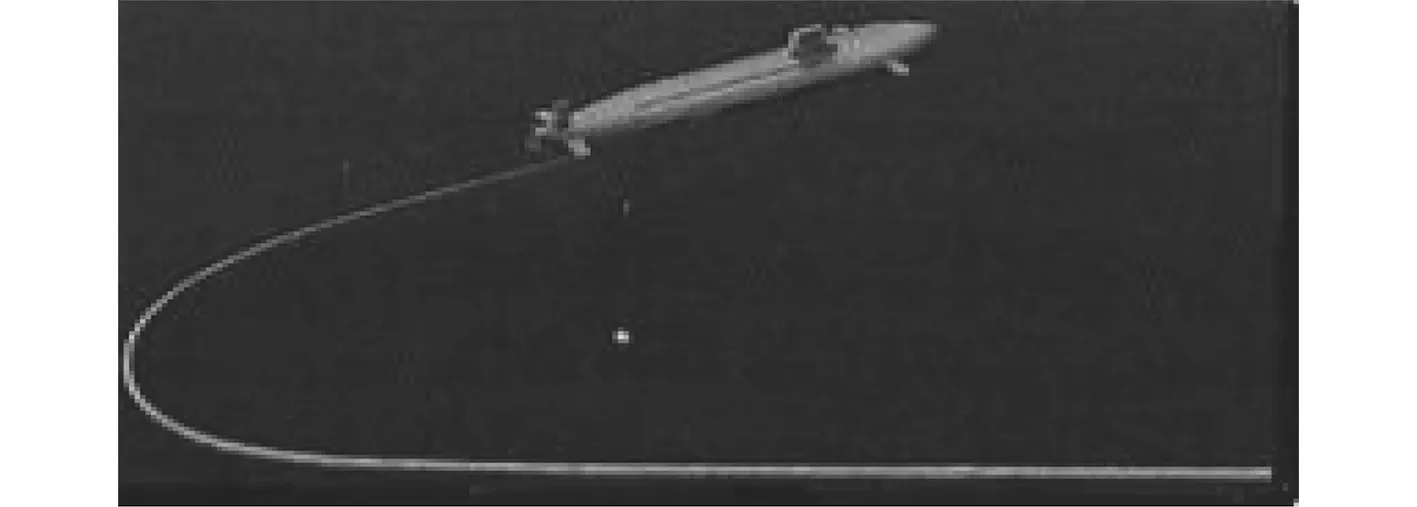
图1 “弗吉尼亚”核潜艇的TB-29A 细线拖曳阵声呐Fig.1 Virginia nuclear submarine TB-29A thinline towed array sonar
吊放声呐主要装备于反潜直升机和某些水面舰船,用吊放电缆将探头或声呐换能器垂入水中进行主动探测或被动监听。声呐浮标主要用于飞机空投,采用主被动工作方式,具有搜索面积大、价格低、使用方便等优点。
目前声呐技术不断向低频段扩展,主动声呐低频端达1300~2000 Hz,被动声呐已达10 Hz,迫使潜艇不断提高低频域辐射噪声控制能力[3]。
1.1.3 声制导鱼雷
声自导普遍应用于各国鱼雷,是最为成熟的鱼雷制导系统,包括主被动2 种方式。主动自导系统抗干扰性能好,可攻击安静目标,制导精确,但隐蔽性较差,系统复杂。被动自导系统作用距离远,隐蔽性好,系统简单,但不能攻击安静目标,抗干扰性能较差。目前大多数鱼雷均使用主/被动联合声自导系统。
1.1.4 声引信
声引信属于非触发引信,采用主动或被动工作方式。鱼雷、水雷、深弹等战斗部均可采用声引信。主动声引信抗干扰能力强,可靠性高;被动声引信隐蔽性好、体积小、能耗低。
1.2 电磁波
包括雷达、电子侦察、光电侦察等。
1.2.1 雷达
雷达波在水中的传播距离较短,主要用于探测潜望航态以及水面航渡状态的潜艇,或是利用雷达探测因潜艇运动形成的水动力学尾迹、热尾迹、气泡尾迹和电磁扰动等[4]。对海搜索雷达是反潜警戒的重要力量。
1.2.2 电子侦察
电子侦察主要是截获潜艇在通信或导航定位过程中产生的电磁辐射。电子侦察装备包括电子侦察卫星、电子侦察飞机、地面电子侦察站、电子侦察船,以及包括潜艇在内的水下电子侦察装备等。
1.2.3 光电侦察
包括可见光侦察、红外侦察、激光侦察等。
1)红外
常规潜艇在通气管状态利用柴油机发电时,排放的高温废气和排气管道金属壁面会形成明显的红外辐射信号,可以被红外探测设备发现。潜艇在水下航行时,不管是核动力潜艇还是AIP 潜艇,都会通过冷却水向艇外排放废热,在潜艇尾部形成温度较高的热尾流,红外探测器能够捕获到热尾流在海面形成的温度异常[5]。图2 为水下航行体热尾流红外辐射示意图。
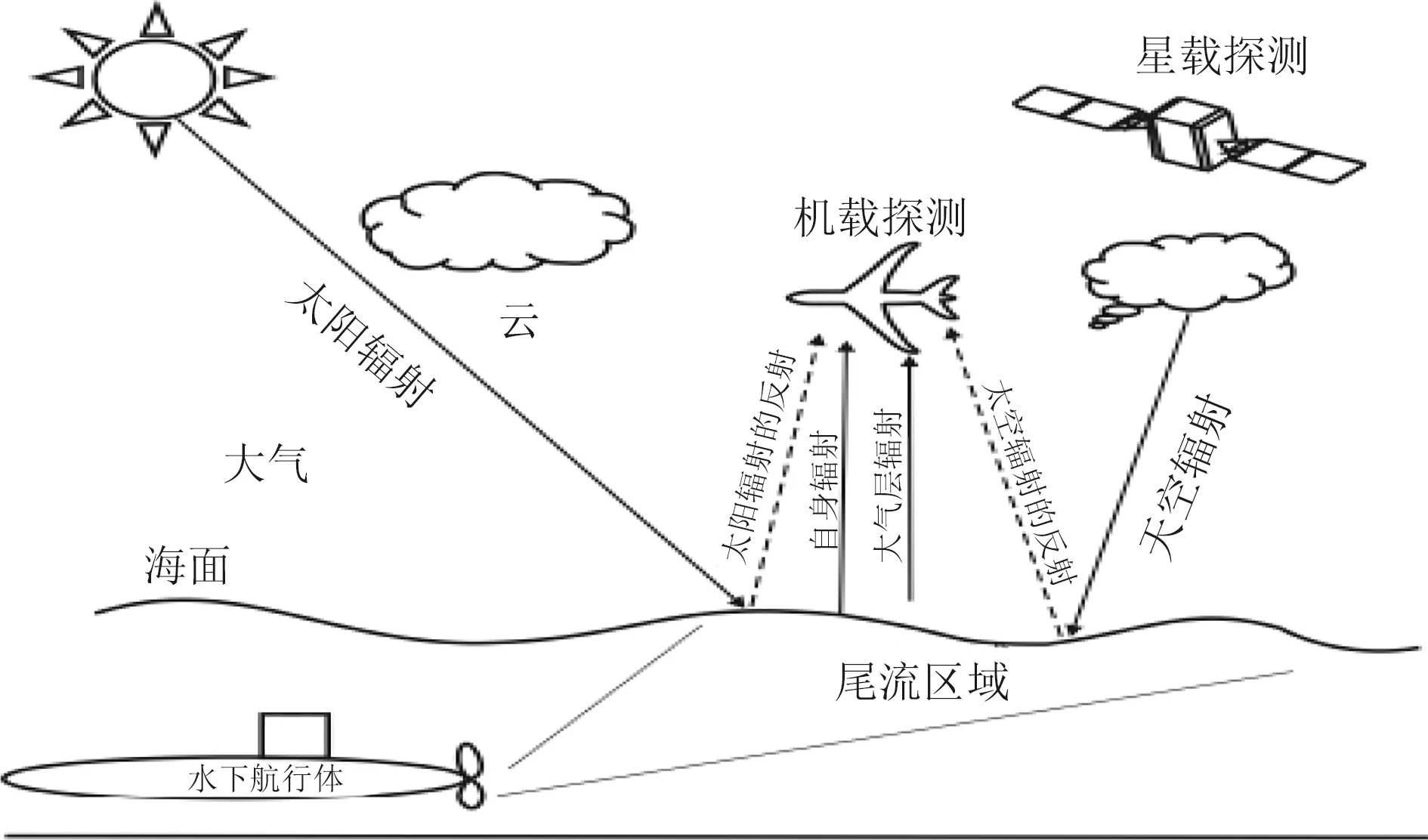
图2 热尾流红外辐射示意图Fig.2 Thermal wake infrared radioction
2)可见光
澄清海域,可见光可穿透大约100 m 水深[6]。利用可见光探测潜艇,其探测深度与海水的光学性质、海面粗糙度、观测者角度、太阳天顶角、目标的反射率等环境条件密切相关[7]。
3)激光
近年来,一些国家开展了激光雷达(LIDAR)探潜研究。激光雷达具有较好的探测精度。蓝绿激光(450~550 nm)在海水中穿透率高,有效探测深度大。美国开发的探潜蓝绿激光系统(工作波长510 nm),最大有效探测深度可达200 m[6]。
1.3 尾 迹
潜艇尾迹主要包括水动力尾迹、生物光尾迹和热尾流尾迹等。
1)水动力尾迹
潜艇潜航时会在水面留下水动力尾迹,其强度取决于潜艇的航速、潜深和外形尺寸等。水动力尾迹又可以分为伯努利水丘、开尔文尾迹、旋涡尾迹、内波尾迹等。一般认为,内波尾迹由航行体对海水密度、温度、盐度分层的扰动形成。潜艇在水下航行时,有可能产生长达数千米的线状内波尾迹。据称美国利用内波曾探测到在300 m 水下航行的前苏联潜艇[8]。
2)生物光尾迹
海洋中充满发光生物。潜艇航行时引起周围海域电磁场的变化,导致发光生物发光强度的变化,同时潜艇航行形成的涡流会刺激发光生物发光,形成可被观察到的生物光尾迹。该尾迹信号弱,易受干扰[9]。
3)热尾流尾迹
潜艇产生热尾流的原因主要有两点:一是由于潜艇排放的冷却水产生热尾流信号;二是潜艇航行时将海中的冷水带到海面形成的“冷尾流”信号。通常这两类信号都被称为热尾流[10]。美国第3 代“白云”号海洋军事监测侦察卫星搭载无源红外传感器,通过探测热尾流,可实现对水下45 m 目标的侦察和定位[11]。
1.4 其他物理特性
包括电磁场、压力场等。
1)磁场
潜艇艇体和装艇设备大量采用铁磁材料,在地磁作用下形成艇体磁场,包括固定磁场和感应磁场。通过地磁异常信号检测,可以发现水下航行状态的潜艇。据称俄罗斯研发的搭载于K-27PL 直升机上的磁传感器可探测400 m 水深的潜艇[12]。
2)电场
潜艇周围海水中存在电场,按形成原因可分为静电场、轴频电场、感应电场和谐波电场等。轴频电场和静电场信号频率低,传播距离较远[13],利用电场信号可以探测跟踪潜艇。美国、俄罗斯等国装备有电场引信水雷[14]。
3)压力场
潜艇航行时产生的水底压力场难以被消除和模拟,是识别潜艇的重要物理场之一[15]。
2 潜艇主要隐身技术
日益先进的探测制导手段,使得潜艇在海战中被发现、攻击和消灭的概率大大提高,如何有效提高潜艇的隐蔽性成为各军事强国的研究重点。
2.1 声隐身
利用声波探测潜艇,一是依靠被动声呐接收潜艇的辐射噪声,二是依靠主动声呐接收潜艇的回波信号。所以潜艇声隐身主要包括2 个技术方向:一是降低潜艇辐射噪声,减少被动声呐发现距离;二是降低潜艇的声目标特征,降低主动声呐的发现概率。潜艇声隐身主要技术途径见表2。

表2 潜艇声隐身主要技术途径Tab.2 Main technical approaches of submarine acoustic stealth
2.1.1 降低辐射噪声
潜艇声隐身性能与潜艇的辐射噪声密切相关,甚至是决定性因素。振动不一定产生噪声,但噪声都是由振动产生的。潜艇主要辐射噪声源包括3 类:机械噪声、螺旋浆噪声和水动力噪声。降低辐射噪声主要有2 个技术途径:降低噪声源的噪声强度;控制噪声的传递过程。
1)降低噪声源的噪声强度
机械噪声是机械系统激励艇体振动产生的噪声。动力装置、辅助设备和系统是船舶主要机械噪声源。降低机械噪声源强度的主要技术手段包括:采用自然循环压水堆,采用燃料电池等AIP 动力系统,采用电力推进,采用永磁推进电动机或高温超导电机,采用自航发射等低噪声发射技术等等。
螺旋桨噪声是桨叶旋转直接辐射的噪声,及其诱导脉动压力通过轴系激励艇体振动产生的噪声。降低螺旋浆噪声的主要技术手段包括:采用7 叶大侧斜螺旋桨或泵喷推进,探索磁流体推进等新型推进方式。
水动力噪声是由艇体表面绕流形成的湍流脉动压力激励艇体产生的噪声,与潜艇的线型、壳体附体的数量和布置、开孔的数量和形状等因素有关。控制水动力噪声的途径主要包括优化艇体外形,合理选择附体的数量、形状和位置,尽可能减少艇体表面开孔面积,采用合理的流水孔及其布置方式等,减少流体阻力和产生湍流,同时优化推进组合体,降低螺旋桨转动时产生的紊流噪声。
2)控制噪声传递过程
主要采用消声技术和减振技术。消声技术主要是对艇内设备加装隔声罩,艇体敷设去耦瓦、阻尼瓦等消声材料来降低辐射噪声,采用有源消声技术来减少艇内声源等。减振技术按控制方式分隔振、吸振、消振和阻振等,主要是在激励源和传递途径之间添加阻尼系统来消耗振动能量,减少振动的传递。隔振装置经历了单层隔振系统、双层隔振系统、浮筏隔振系统等阶段[16]。
2.1.2 降低声目标特征
潜艇的声目标强度与潜艇体积、外形及方位关系密切。在潜艇外壳表面敷设消声瓦,吸收损耗主动声呐探测波,可显著降低潜艇的声目标强度。随着潜艇辐射噪声逐步降低,主动声呐逐步向低频端扩展,国外近年发展了兼有主动吸声、主动隔声和主动声辐射控制的多功能主动消声瓦、回波隐身外形等降低潜艇声目标特征的技术。
2.2 电磁波隐身
主要包括雷达波隐身、电磁辐射隐身、光电隐身等。
2.2.1 雷达波隐身
雷达隐身主要针对的是潜艇露出水面的部分,主要技术手段包括:对升降装置进行小型化设计和隐身设计,加装导流罩或屏蔽罩。在潜艇围壳表面和水线以上部位涂覆吸涂材料或采用透波材料等[17]。
2.2.2 电磁辐射隐身
探索隐蔽通信方法,减少潜艇因通信或导航定位产生的电磁辐射。
2.2.3 光电隐身
红外隐身。在潜艇的围壳和升降装置等表面涂敷红外隐身材料,采用空气冷却、喷淋冷却等技术对排气系统管壁及废气进行冷却,提高动力系统热量利用效率,对潜艇产生的热量进行短时存储,优化热排水系统设计,采用泵喷推进等技术措施,以及根据环境条件来进行工况调整、增大下潜深度等战术使用措施来降低潜艇的红外辐射特征[18]。
可见光隐身。以色列“海豚”级潜艇采用与周边海域水色接近的绿色涂料,提高其光学隐身性能。美国“海狼”级潜艇在其潜望镜和通信天线升降装置上采用了迷彩涂料[19]。
激光隐身。采用在潜艇表面涂敷吸收材料,减小激光散射截面等方法。
2.3 尾迹隐身
潜艇尾迹主要由潜艇航行时对海水的扰动,以及潜艇排放废热形成的扰动形成。尾迹隐身主要就是要抑制这些扰动。通过对潜艇外形及附体进行水动力学优化设计,采用泵喷推进改善尾部流场等措施可以降低水动力扰动。抑制潜艇内波尾迹很困难,目前的研究基本处于探索阶段。通过分级排放潜艇冷却水,降低排放水与环境海水的温差,可以减少热尾迹。潜艇尾迹特征与其潜深、航速及所处海洋的水文条件关系密切。根据水文条件合理改变潜艇潜深、航速,可有效降低潜艇尾迹特征被探测到的概率[20]。
2.4 其他物理场隐身
磁场隐身。采用无磁或低磁材料建造潜艇,利用消磁站或消磁船对潜艇消磁,采用艇载主动消磁系统等技术手段。
电场隐身。可通过合理设计防腐系统降低潜艇电场,研制电场防护系统消除已形成的潜艇电场[21]。
水压场隐身。采用在船底加装附体等手段,可以改变船舶水压场,是防御水压水雷的途径之一[22]。
3 潜艇隐身技术发展趋势分析
探测技术和隐身技术是对立统一体,相互促进,相互追赶。技术领先和创新将在未来战争中起到关键作用。
3.1 探测制导技术发展趋势
主要包括提高现有探测制导技术水平、对各种探测制导技术手段进行综合集成,探索新型探测制导技术等。
3.1.1 提高现有探测制导技术水平
目前声呐技术不断向大功率、大基阵、低频方向发展,声呐模块化、标准化、可靠性、维修性、自适应能力和智能化水平显著提高,压电聚合物和光纤等新型水听器材料得到应用,不同声呐间的信息融合能力不断增强[23]。
3.1.2 对各种探测制导技术手段综合集成
随着潜艇声隐身性能的提升,各海军强国均投入力量开展非声探潜方法研究,如尾迹探测、激光探测、磁探测、电场探测、合成孔径雷达探测等。深入发展非声探测技术,实现声探测与非声探测等各种探测手段的综合集成,是探潜技术的发展方向。
3.1.3 探索新型探测制导技术
核辐射探潜、重力梯度探测、生物探潜等新型探潜技术不断涌现,无人装备探潜技术发展迅速。
3.2 潜艇隐身技术发展趋势
加强隐身顶层和总体设计,提高潜艇隐身性能评估技术水平,不断发展隐身材料,深入开展隐身技术集成,探索隐身新机理,成为潜艇隐身技术的发展方向。
3.2.1 设计先行
在潜艇总体设计中,应不断强化以隐身性设计引领总体设计的理念,并将这种理念贯穿于潜艇研制的每个环节。深入开展隐身设计技术、评估测试技术、建造工艺技术等研究,实现潜艇的隐身集成定量优化设计和隐身成果的综合集成应用[24]。
提高潜艇的下潜深度和水下连续潜航能力是提高潜艇隐身性能的有效途径,需要突破大潜深材料技术、大潜深结构技术和大潜深系统相关技术;需要提高核动力系统、AIP 动力系统和蓄电池性能;需要提高潜艇水下导航精度和校准精度,延长惯导重调周期;需要潜艇具备深水隐蔽通信和武器深水隐蔽发射能力,是一项涉及多领域、多学科的系统工程。
3.2.2 评估准确
为有效控制潜艇特征信号,必须对其进行准确计算评估,提高特征信号测量精度。目前对潜艇特征信号进行评估的手段包括理论计算、经验推导、数值仿真、试验测试等。通过深入研究潜艇目标特征机理,深入开展技术攻关和条件建设,提高潜艇目标特征试验和测试精度,建立和发展潜艇目标特性试验与测试技术体系,可为有效控制舰船目标特征提供坚实基础。
隐身测试技术是隐身技术的重要组成部分,需要不断发展提高综合性多物理场测试技术水平,测试频段不断向低端和高端扩展,形成规范化、标准化、系列化的测试方法,不断满足潜艇隐身综合测试的需求[25]。
3.2.3 发展新型隐身材料
目前的隐身材料适用范围不够广泛,需要研制既具备声波隐身功能,也具备电磁隐身功能等全能型隐身材料。新型隐身材料包括新型复合阻尼材料、新型磁致伸缩材料、负泊松比材料、功能梯度材料、仿生材料等。
3.2.4 探索新机理
各海军强国都在探索潜艇新型隐身机理,深入研究新概念潜艇、新型安静型动力、动态隐身、主动与半主动控制、声学智能结构和新材料等技术。无人潜航器和无人潜艇的发展将对潜艇隐身技术带来重要影响。
4 结 语
潜艇隐身是一项系统工程,需要系统建立隐身定量设计方法、准则、规范,建立配套的隐身评估测试技术、评估测试标准1和相关数据库,需要潜艇设计、建造、试验、使用等阶段紧密结合,需要考虑技术可行性与经济承受能力,在众多纷繁的使用需求中寻求兼容与平衡。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
小哥白尼(军事科学)(2022年1期)2022-04-26
舰船科学技术(2021年12期)2021-03-29
劳动保护(2019年3期)2019-05-16
军事文摘·科学少年(2018年6期)2018-09-06
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
饮食科学(2016年7期)2016-07-27
小学阅读指南·低年级版(2014年10期)2015-01-27
现代电子技术(2009年13期)2009-08-31
