
多智能体系统的聚类-分量一致性
2020-12-18 07:35陈慧芳马忠军
桂林电子科技大学学报 2020年3期
陈慧芳, 马忠军
(桂林电子科技大学 数学与计算科学学院,广西 桂林 541004)
近年来,在许多领域人工智能有着及其广泛的应用[1-3],不同领域的学者从各自的研究领域分别对其进行研究,希望可以借助多个智能体间之间的合作以高效完成一些单个智能体无法完成的复杂任务。作为多智能体系统中最基本的问题,一致性指的是借助一些控制策略,智能体的状态变量(如位移或速度等)通过相互通信或相互作用渐近趋于恒同。目前在一致性领域,多智能体已经涌现了很多优秀的研究成果[4-9]。
聚类一致是一种相比恒同一致来说更为一般的一致性,目前已有一些重要文献,如Wu等[10]通过设计一个合适的牵制控制器使普通网络系统达到聚类一致,并给出了一种通过调整控制增益强度来提高收敛速度的方法;Lin等[11]通过应用时变线性反馈控制协议探讨了不确定神经网络的聚类一致性问题;Wu等[12]提出了一种分布式牵制控制策略,通过控制每个社区中生成树的耦合权重参数从而使系统达到聚类一致,这种方法费用低,更具有现实意义;Wang等[13]引入一种有效的反馈控制方案,导出了时变时滞耦合网络聚类一致的判定依据;Ma等[14]研究了网络拓扑结构为有向、弱连通时,多智能体系统达到聚类一致的几个一致性准则;考虑到在实际情况下通信会延时,Xie等[15]研究了二阶时滞系统的聚类一致问题;文献[16-17]分别探讨了一阶和二阶非线性系统实现聚类-滞后一致的问题,并导出了带有时变通信拓扑结构的二阶系统达到聚类-滞后一致的充分条件。
此外,Feng等[18]研究了二阶非线性多智能体系统的部分状态一致性(速度变量一致,位移变量不一致)问题,并得到了一种具有切换拓扑、时变时延和间歇性信息传输的异步分布式一致性协议;吴彬彬等[19]首次应用微分方程关于部分变元稳定性,探究了一阶非线性多智能体系统中所有状态变量的部分分量达到一致的充分条件。
聚类-分量一致,指的是多智能体系统中所有状态变量的部分分量实现渐近趋同,而对于所有智能体状态变量(含所有分量)来说是通常意义上的聚类一致。聚类-分量一致比聚类一致强,比恒同一致弱,是介于两者之间的一种群体动力学行为。
1 预备知识

设每个智能体的模型为
xi(t))+ui(t),i=1,2,…,N,
(1)
其中:xi=(xi1,xi2,…,xin)T∈Rn为第i个智能体的位移变量;f:Rn→Rn为一个非线性函数,用来描述第i个智能体的局部动力学;常数c>0为控制增益;Γ=diag(r1,r2,…,rn)为半正定的内部耦合矩阵;A=(aij)N×N为相应的邻接矩阵;ui(t)为待定的控制项。
每一聚类中虚拟领导智能体的方程为
φi=1,2,…,m,
(2)
其中:φi为第i个智能体所属的聚类指标,即第i个智能体属于第φi个聚类;sφi(t)为第φi个聚类中一个确定点的位移;常数gφi>0。

定义2[19]令Eφi=sφi-sφ1,
Eφi(t)=(Eφi1(t),Eφi2(t),…,Eφin(t))T,
φi=1,2,…,m。
若存在1≤ω≤n,使得系统(1)、(2)的解满足
则称系统(1)、(2)关于前ω个分量达到(部分分量)一致。

聚类-分量一致既是聚类一致的,也是部分分量一致的。
假设1[19]若存在常数α>0,∀x,y∈Rn,使得函数f满足
(x-y)T(f(x)-f(y))≤α(x-y)T(x-y)。
引理1[19]考虑下列微分方程组
其中,
F(t,x)∈C[R+×Rn,Rn],F(t,0)≡0,
x=(y,z)T=(x1,x2,…,xw,xw+1,…,xn)T∈Rn,
y=(x1,x2,…,xw)T∈Rω,
z=(xw+1,…,xn)T∈Rp,

令η、Ψ和β都是K类函数,若存在函数V(t,x)满足η(‖y‖)≤V(t,x)≤≤Ψ(‖y‖),它的导数满足:
则式(2)的零解关于部分变元y是渐近稳定的。
引理2[19]设H=(hij)∈RN×N,B=(bij)∈Rn×n, 则存在nN阶置换矩阵P=Ps…P1,其中Pi是第一类初等行变换矩阵,即对调单位矩阵的某两行后得到的矩阵,使得P(H⊗B)P-1=B⊗H成立。其中,i=1,2,…,s,s∈N+,⊗表示Kronecker积。
2 主要结果
定理1对于控制项
ui(t)=-gφiΓ(sφi-sφ1)-di(xi(t)-sφi(t)),
(3)
系统(1)、(2)在满足假设1的条件下,若
同时成立,系统(1)、(2)实现聚类-分量一致。
证明1)由式(1)、(2)、(3)可得误差系统
(4)

其中e(t)=(e1T(t),e2T(t),…,eNT(t))T,则
2)由式(2)可得误差系统Eφi(t)=sφi(t)-sφ1(t),则
f(sφi(t)))-gφiΓ(sφi(t)-sφ1(t)),
φi=1,2,…,m。
令G=diag(g2,g3,…,gm),可将上述误差系统改写为
(G⊗Γ)E(t),
(5)
其中,
Eφi(t)=(Eφi1(t),Eφi2(t),…,Eφin(t))T,

(6)
其中,


y=(E21(t),…,Em1(t),E22(t),…,Em2(t),…,
Emw(t))T, 1≤ω≤n。
显然η,Ψ∈K。

η(‖y‖)≤V2(t,x)≤Ψ(‖y‖),

若αIm-1-rkG<0,则存在β>0,使得

3 数值模拟
例设第i个智能体的状态方程为
通过计算,若上式满足假设1,且α=1,假设N=7,则该智能体的拉普拉斯矩阵为

取Γ=diag(1,1,0)与di=20,gφi=15,定理1条件成立。运用MATLAB软件计算得到图1。其中,图1(a)、(b)分别为第1聚类中所有智能体和第2聚类中所有智能体的误差轨迹图。图2为xi的3个分量随时间变化的曲线。从图2可看出,所有智能体的前2个分量都能达到一致,而最后一个分量未达到一致。
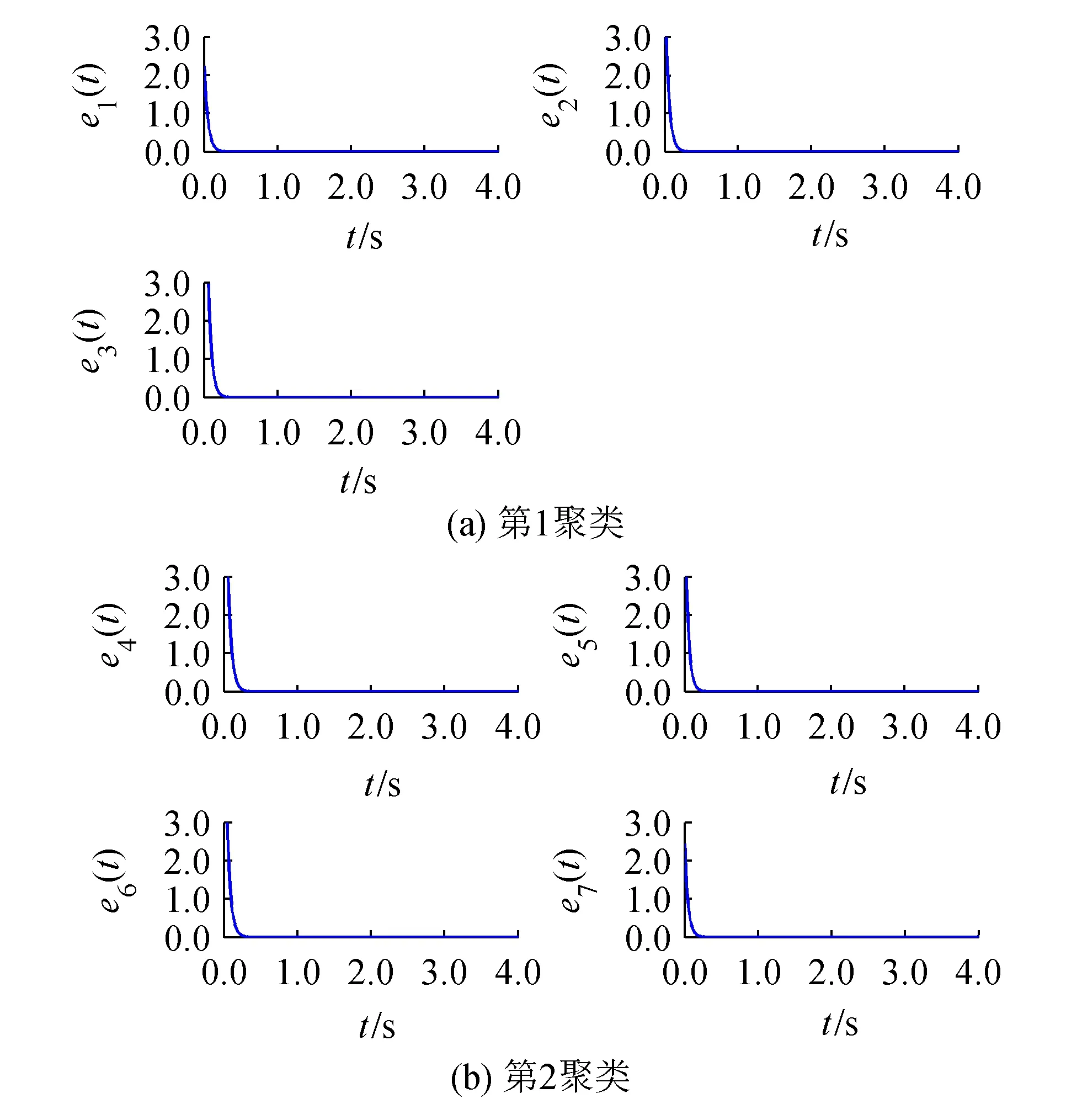
图1 2个聚类的误差轨迹

图2 xi的3个分量随时间变化的曲线
4 结束语
研究了一阶非线性多智能体的聚类—分量一致性问题,通过设计相应的控制协议,将原智能体系统的一致性问题转化为误差系统的稳定性问题[19],导出了系统实现聚类-分量一致性的充分条件。数值模拟结果验证了理论的正确性。
猜你喜欢
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
应用数学(2020年2期)2020-06-24
数学物理学报(2020年1期)2020-04-21
智能计算机与应用(2020年10期)2020-03-18
自动化学报(2019年12期)2020-01-19
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
