
探析电气制动在交流电力拖动系统的应用
2020-12-16 07:23田明义
商品与质量 2020年49期
田明义
中国能源建设集团东北电力第二工程有限公司 辽宁大连 116000
1 反接制动
当电动机断开电源后,为了使电动机能够迅速停转,在切断三相电源的同时再给电动机加上与正常运行电源反相的电源。此时,电动机转子的旋转方向与电动机旋转磁场的旋转方向相反,电动机轴上产生的电磁力矩与转轴的惯性力矩方向相反,成为制动力矩,从而加快了电动机的减速。为了保证反接制动安全可靠,采用这种方式时通常在电动机的转轴上安装一个速度继电器,将速度继电器的转子与电动机的转子同轴连接,电动机转动时,速度继电器的动合触点闭合,电动机停转时,动合触点断开,借助电动机转轴牵引速度继电器的触点变化来控制电动机的主电路,从而实现整个停车过程。这样能防止当电机转速为零时,如果不及时切断所加的反相电源,电机就会持续反转的情况发生。车床、砂轮机、空气压缩机、液压泵、自动化生产单元等不允许电动机反转的机械设备或生产机械,就不能采用这种反接制动的方式来停止电动机的运行[1]。很显然,反接制动方式只能使用在允许电机反转的设备上,如普通车床、搅拌机等生产设备。
2 能耗制动
三相交流异步电动机脱离三相交流电源的同时,给电动机的定子绕组通上直流电流,电动机在惯性运动下切割定子绕组的恒定磁场,使得转轴绕组产生感应电流与静止磁场相互作用,进而达到三相交流电动机制动的目的。整个工作过程:定子绕组通过直流电流产生恒定的磁场,转子在惯性力矩下转动,使转子绕组获得感应电流,在电磁感应作用下,转子产生与转速相反的电磁制动力矩Tem,使转子转速变为零。通常三相异步电机拖动反抗性恒转矩负载时,采用能耗制动可以准确制动停车。从能量角度讲,能耗制动是将电机的动能转化为电能消耗在制动电阻上。改变直流励磁电流If 的大小或改变转子回路串接电阻的RC 值,就可调整能耗制动状态下的电动机的转速,达到准确制动的目的[2]。能耗制动的特点是制动平稳、冲击小,制动时间较长。其它场合也可以类比应用。
3 回馈制动
3.1 正向回馈制动
正向回馈制动一般发生在电力机车下坡、电动机正向运行时降低了定子电流的频率或增加了定子绕组的磁极对数等场所。如图1所示为异步电机频率降低时的正向回馈制动机械特性曲线。在图1中曲线1 为正常电源频率时的机械特性,曲线2 为电源频率降低后的机械特性。图中的n1 是电动机的同步转速,n1/ 是在降低电源频率后电动机同步转速。从图1 可见:机械曲线由1 变为曲线2,此时电机的转速n 运动点从曲线1 的A 点变为曲线2 的B 点,电磁转矩变负。在电磁转矩和负载转矩的共同作用下,电动机很快减速,运行点沿B- n1-C,最终稳定运行在C 点。在B- n1 段,异步电动机的电磁转矩为负,转速为正,电机转速大于电动机的同步转速,这就是正回馈制动特点。根据电磁功率的变换原理来分析,在回馈制动的过程中,电动机减速运行,电动机转轴的转速从高速变到低速,变换过程中释放的机械动能转变为电能,这些电能一部分消耗在电枢回路的电阻上,一部分返回电源,这时的电动机实际上是台发电机,将电力拖动系统减小的动能转变为电能送入电网[3]。通常在交流拖动系统中,异步电动机不能稳定运行在正向回馈制动的第二象限内,只有在拖动设备下坡运行或下放重物时才能稳定运行在第二象限。比如,电力机车牵引车辆在下坡道运行。
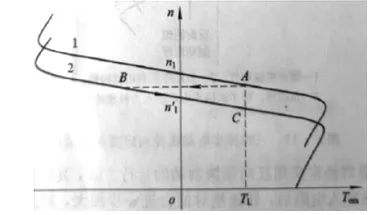
图1 电动机频率降低时的正向回馈制动
3.2 反向回馈制动
采用反向回馈制动方式的电动机,大多数是绕线型转子结构的电动机。这种结构的电动机一般可以通过转子回路串接电阻来调节转速绝对值。反向回馈制动运行的过程与正向回馈制动的过程一样,此时,电动机变为发电机,将负载位能减少而输入的机械功率转变为电功率,再反馈给电网。反向回馈制动运行的特点是转速n <-n0(式中n 为电动机的转轴转速,n0 为电机的同步转速),制动段位于第Ⅳ象限,不能停车,只能高速下放重物。
回馈制动是电动机电动状态下运行的一种状态,在某种条件下会出现由负载拖动电机运行的情况,此时出现n >n1(式中n 为电机转轴的转速,n1 为电机的同步转速)、Ea >U、Ia 反向(Ea为电枢电动势,U 为电源电压,Ia 为电枢电流),电机由驱动变为制动。从能量方向看,电机处于发电状态- 回馈制动状态。整个回馈制动过程中,电能消耗较低,经济性好,回馈制动的主要缺点是控制系统复杂。
总之,随着电力电子技术的发展,异步电动机的回馈制动已经成为轨道交通行业的电力机车控制、矿山提升设备、运输设备的变频调速等技术热点。尤其是SPWM 技术的成熟应用,已经解决了回馈制动过程中出现的能量损耗、快速制动时引起的变频器泵升电压等问题,使得回馈制动的制动力矩增大、调速范围变宽、动态性能更好。
猜你喜欢
微特电机(2022年9期)2022-10-15
防爆电机(2022年4期)2022-08-17
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年4期)2020-12-14
电脑爱好者(2016年23期)2017-01-05
小小说月刊(2010年12期)2010-05-14
