
浅谈空间信息在室内定位中的可行性
2020-12-15 08:37:58李司宇
科学技术创新 2020年36期
李司宇
(北京市北京建筑大学,北京110000)
1 概述
目前,室内定位技术主要包括基于iBeacon 的蓝牙技术,基于RFID 的射频技术,基于Wi-Fi 的指纹定位技术,超声波技术以及UWB超宽带技术等。但由于城市化进程不断加快,大型建筑物结构越来越复杂,单一的定位方案不足以满足定位需要,因此诸多专家学者将研究转移到多种定位方法融合上,发挥各自方法的优势以实现更好的定位效果。但这种方案耗能快,耗费人力物力,会产生大量的成本。而建筑信息模型对于结构复杂的建筑物不仅可以提供真实且直观的三维定位场景,其中蕴含的空间信息也可以为室内定位提供辅助支持。
2 室内定位的研究现状
2.1 基于iBeacon 的室内定位技术
iBeacon 是apple 公司在2013 年发布的一种基于低功耗蓝牙的室内定位技术,其工作方式是通过低功耗蓝牙的通信功能让附近的移动端设备检测到由iBeacon 信标发出的蓝牙信号,通过软件和硬件的结合以提高室内定位的精度。事实上,iBeacons 技术更像一种典型的基于网络邻近性的服务,移动端设备将根据与某个网络节点的距离来获取数据。从定位方法来看,蓝牙定位主要使用三边定位算法。目前,蓝牙定位技术由于其低成本,低功耗,安全性高的优点已经在国内如医院、工厂、会展、智慧大楼、博物馆、展览馆、幼儿园、养老院、监狱等领域被广泛应用,并提供了较为完善的室内定位解决方案。
2.2 基于Wi-Fi 的室内定位技术
Wi-Fi 定位技术是目前相对成熟且应用较广的一种室内定位技术,近几年成为众多研究机构的室内定位首选方案。Wi-Fi 的定位机制和蓝牙定位类似,都是基于RSSI 的定位方法,但Wi-Fi 信号由于其单天线、带宽小以及较为复杂的室内信号传播环境使得传统的基于到达时间/到达时间差(TOA/TDOA)的测距方法难以实现,而如果部署可定向的天线设备又会产生较高费用。因此,Wi-Fi 一般采用位置指纹法进行定位。Wi-Fi 定位可以实现复杂的大范围定位,方便组网,很容易架设在现有的无线Wi-Fi 网络。目前在医疗领域、游乐场、车间、大型购物商场等需要定位导航的室内场景已经开始得到广泛应用。用户在使用智能手机时开启过Wi-Fi、移动蜂窝网络,就可能成为数据源。该技术具有便于扩展、可自动更新数据、成本低的优势,因此最先实现了规模化。
2.3 基于RFID的射频定位技术
RFID(radio frequency Identification,射频识别)技术是一种非接触的非视距(NLOS)技术,用于检测特定区域内标签的存在。它使用无线电波从射频兼容集成电路(即射频识别标签)传输信息。该技术硬件主要由RFID阅读器和RFID标签组成。RFID 阅读器与可检测范围内的标签进行通信,并将从标签收集的信息发送到主机。需要监视的对象由RFID标签标记。RFID标签是一种带天线的集成电路。每个RFID标签都有一个唯一的标识符(ID)。RFID标签可以分为主动标签和被动标签。主动标签由自己的电池供电,因此可以在更远的距离内检测到。无源RFID标签在没有电池的情况下工作,它接收来自RFID阅读器的RF 信号并作出响应。随着技术的进步和自身特点的提高,RFID 技术已经成功地应用于室内定位。
2.4 超声波定位
不同于前述定位技术,超声波定位是一种基于机械波的定位方式,其可以在气体、液体和固体中传播,主要利用超声波的测距方法,并根据距离通过算法来计算出待测物体的位置,超声波测距主要有反射式测距法和单项测距法两种方案。其中,反射式测距法就是向待测物体发射超声波,同时接收被测物体产生的回波,利用发射波与回拨的时间间隔得到待测距离。而单向测距法可以实现两点测距,将不少于三个且不在同一直线上的接收器部署完成,就可以求出被测物的具体位置。虽然超声波定位可以实现高达厘米级精度,但是其定位范围容易受到传输过程中信号衰减的影响。
2.5 UWB超宽带定位
UWB(UltraWideBand,超宽带)是一种以极低功率在短距离内高速传输数据的无线通信技术。UWB 定位技术主要包括接收器、参考标签和主动标签,标签发射UWB 信号,但电磁波传输过程中会产生大量的噪声干扰,接收器收到后过滤信号后并将噪声过滤以获得有效的信号值,最终利用中央处理单元进行测距定位。UWB具有较强的抗干扰能力、较高的传输速率、耗能低等诸多优势,可以有效避免现有的基于RSSI 定位技术所面临的“穿墙问题”。并且,超宽带定位的精度可以高达十几厘米,在众多无线定位技术中具有较大的优势,但目前超宽带技术还处于发展阶段,相关定位算法还有待改进。
3 空间信息在室内定位中的应用
3.1 空间信息的提取与三维路网的构建
由于建筑结构复杂性,现有的基于RSSI 的室内定位技术在定位场景大多会存在信号衰减的问题,造成“穿墙”、“飞天”等不合理的定位结果。虽然UWB超宽带技术及融合定位可以有效避免这种问题,但由于其较高的成本仍然无法被广泛使用。建筑地图包含着丰富的几何和语义信息,是三维室内地图模型中空间信息的理想来源。因此,我们从前面建立的BIM模型中提取出构建路网所需的数据,包括楼梯、电梯、房间、门等节点的信息。根据提取的节点类型,将信息分为几何信息、语义信息和拓扑信息,存储在PostgreSQL数据库中。PostgreSQL数据库中三维路网模型信息的存储结构如表1 所示。节点坐标信息的提取是将BIM模型转换为*.obj 格式,然后导入Blender V2.78,这是一个免费的开源三维创建工具包,支持整个三维流水线的建模、装配、动画、仿真、渲染、合成和运动跟踪。最后,利用WebGL在三维BIM场景中实现了室内道路网络模型的可视化。三维道路网的骨架如图1 所示。

表1 PostgreSQL 数据库中部分三维路网地图模型信息的存储结构

图1 室内路网节点的单层分布
作为室内定位导航的应用场景,室内路网模型的构建不仅考虑了路网的可视化效果,还考虑了如何与室内定位导航相结合。由于路网模型是从室内拓扑关系中抽象出来的,因此在室内路网模型中,用户的室内位置可能不是完全定位的。因此,本文提出在室内三维路网中增加位置节点,确定用户与室内地图模型的相对位置关系,并将用户的位置信息链接到路网模型中最近的位置节点,作为后续室内导航工作的基础。如图所示。同时,为了更好的匹配用户的位置信息,我们考虑行人的步行习惯。在水平方向,行人平均步数约为0.5m,因此我们将走廊中节点之间的距离设置为0.5m;在垂直方向,我们在楼梯的每个台阶上设置一个位置节点。除了匹配用户的位置信息外,位置节点还可以用来估计用户的步行距离。常用的室内路径计算方法通常采用网格或节点模型来计算当前节点与目的地之间的欧氏距离。但在实际应用中,欧元距离不能完全代表用户的步行距离,尽管在实际路径规划中,用户的步行距离比欧元距离具有更好的参考价值。因此,本文通过计算用户路径中位置节点之间的间隔数来估计用户所需的步行距离。步行距离是节点之间的间隔数乘以步长0.5m,如图2 所示。
3.2 基于空间信息约束的室内定位方法
空间信息约束方法主要利用地图中墙、门的几何拓扑信息和三维真实地图中的位置点进行校正。通过提取建筑物信息,建立三维室内道路网络模型,将行人运动轨迹抽象为道路网络,并将其显示在道路中间。根据行人习惯,在路网上每隔0.5m设置一个行人点,将行人可以到达的位置抽象为一个点。然后,利用空间两点距离公式,将测试点与数据库中的位置点进行匹配,得到SA1 到SAn的距离,如图5 所示。使用数据库中的门节点或台阶点节点(x0,y0,z0)投影和校准计算的初始坐标(xt,yt,zt)。公式如下:

最后将初始位置A修改为最近的目标点,实现室内地图对定位结果的空间信息约束,提高定位精度以用于室内路径导航。图3是空间信息约束的示意图。
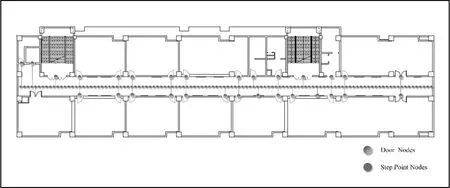
图2 室内路网中待匹配步行节点的单层分布
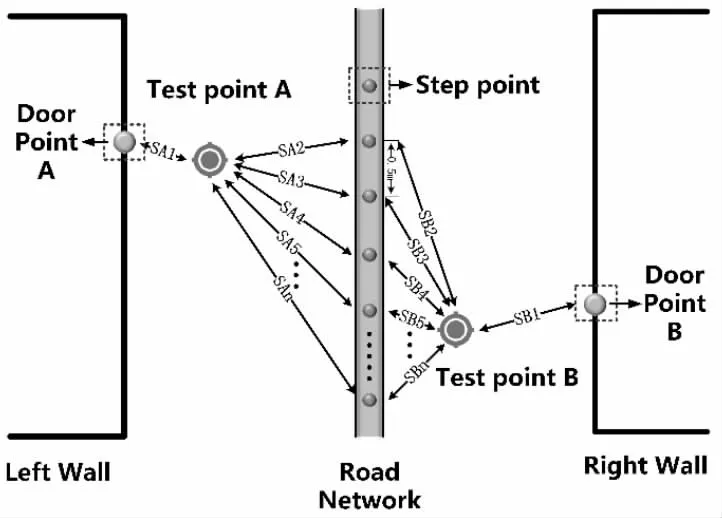
图3 空间信息约束示意图
4 结论
本文概述了目前几种主流的室内定位方法,同时提出了一种空间信息约束方法作为辅助定位。虽然目前室内定位领域的发展已经较为成熟,但考虑到成本、精度、部署便捷性仍有诸多发展空间,基于空间约束信息的定位技术虽然尚处于发展阶段,但由于其低成本与丰富的室内语义信息仍然会成为室内定位技术研究的重要一环。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:57:52
工业设计(2022年7期)2022-08-12 13:18:58
家庭影院技术(2018年10期)2018-11-02 05:35:26
环球飞行(2018年7期)2018-06-27 07:25:54
家庭影院技术(2018年3期)2018-05-09 07:06:11
中国公路(2017年11期)2017-07-31 17:56:30
中国公路(2017年7期)2017-07-24 13:56:29
中国公路(2017年10期)2017-07-21 14:02:37
地理空间信息(2017年2期)2017-03-06 08:35:12
玩具世界(2017年8期)2017-02-06 03:01:38
