
织网机自动换梭盘机器人运动仿真
2020-12-15 12:37罗银杰郝志昌明灿坤孙志军
毛纺科技 2020年11期
罗银杰,孟 婥,郝志昌,明灿坤,孙志军
(东华大学 机械工程学院,上海 201620)
随着科学技术的飞速发展,现代织网机也在近些年有了大幅度的改进,织网机正朝着机器高速化、控制现代化、操作便利化等方面发展。其中,投放使用工业机器人可实现织网机梭盘的自动取放,节省人工和提高生产效率。
机器人的运动学分析是机器人机构分析的前提和基础, 为后续织网机自动换梭盘机器人的运动与控制提供了理论依据。近年来,由于计算机技术与仿真技术的飞速发展,国内外不少学者对机器人仿真技术进行了研究,Dollarhide等[1]应用DELMIA/IGRIP软件对机器人进行建模并完成仿真,实现对机器人的实时监控。康嘉瑞等[2]运用Simulink仿真技术对空间机器人逆运动学进行了研究。王成军等[3]采用笛卡尔空间变量法对铸件机器人工作过程中的运动轨迹进行规划。王玉宝等[4]采用粒子群算法对工业机器人进行空间轨迹时间优化。廖解能等[5]基于Solidworks-Workbench平台建立桁架机器人仿真模型,通过静力学分析与模态分析,提取出桁架机器人的固有频率,大大提高了桁架机器人的使用寿命。李瑾[6]利用MatLab工具箱,针对Puma 250机器人,对其运动特性进行研究分析,并给出了机器人运动轨迹仿真方法。李振雨等[7]以Puma 560机器人为研究对象,建立其运动学方程并进行仿真研究,实现了工业机器人的精确作业。涂鹏飞等[8]采用离线编程技术来规划喷涂轨迹,大大提高了工件的喷涂效率。王林军等[9]基于MatLab对ABB IRB 1660机器人进行了运动学仿真研究。上述研究中普遍对于经典机器人进行了仿真研究,较少定位于实际现场环境。本文以织网机换梭盘工作过程为载体,设计机器人末端执行机构,基于MatLab Robotics Toolbox模块中的功能函数,建立织网机自动换梭盘机器人仿真模型,并对其进行运动学仿真和空间运行轨迹仿真,为在实际操作环境中机器人精确定位提供理论依据,对实现企业中织网机梭盘更换自动化具有一定的研究意义。
1 织网机及其换梭盘流程
织网机是生产网具用品的机械装备,目前企业中较多沿用或仿制20世纪的老式织网机,织网机更换梭盘主要由人工手动完成。随着先进织网机的研发,设计了配套的机器人换梭盘系统。织网机自动换梭盘系统见图1,该系统主要由换梭盘机器人和机器人末端执行机构组成,其中末端执行机构一端与机器人末端固联,另一端插入梭盘,通过末端执行机构上的锥齿与梭盘内圈配合,末端执行机构插入与抬起梭盘时的状态见图2,随着换梭盘机器人的运动带动末端执行机构,将织网机上空梭盘取出并将装满线的梭盘放入梭箱。

图1 织网机自动换梭盘系统

图2 末端执行机构插入与抬起梭盘时的状态
依据负载、成本等因素选择ABB IRB 6700-200/2.60空间六自由度机器人作为换梭盘机器人,机器人各关节主要运动参数见表1。自动换梭盘机器人工作流程见图3。

表1 机器人各关节运动最大速度与范围

图3 自动换梭盘机器人工作流程图
在机器人换梭盘流程中,机器人将一段梭盘从织网机上抬起,定义此时机器人的空间位姿为T1,并水平旋转180°,使机器人末端朝相反方向,目的是将空梭盘依次放入梭箱中,定义此时机器人的空间位姿为T2,这2个空间位姿是完成梭盘取放的关键。在实际操作中,为保证换梭盘效率,通过控制换梭盘机器人的转角速度,使其能够在足够短的时间内由位姿T1平滑过渡到T2。
2 机器人运动学仿真
2.1 仿真模型建立
用虚拟样机对机器人进行运动仿真,首选需要对机器人的仿真模型进行构建。本文通过MatLab中的 Robotics Toolbox模块建立了机器人驱动器仿真模型并命名为自动换梭盘机器人,此时换梭盘机器人处于从织网机上抬起梭盘时的位姿,即位姿T1,机器人各关节转角为q0=[0 0 0 0 0 0],机器人抬起梭盘时位姿仿真模型见图4。
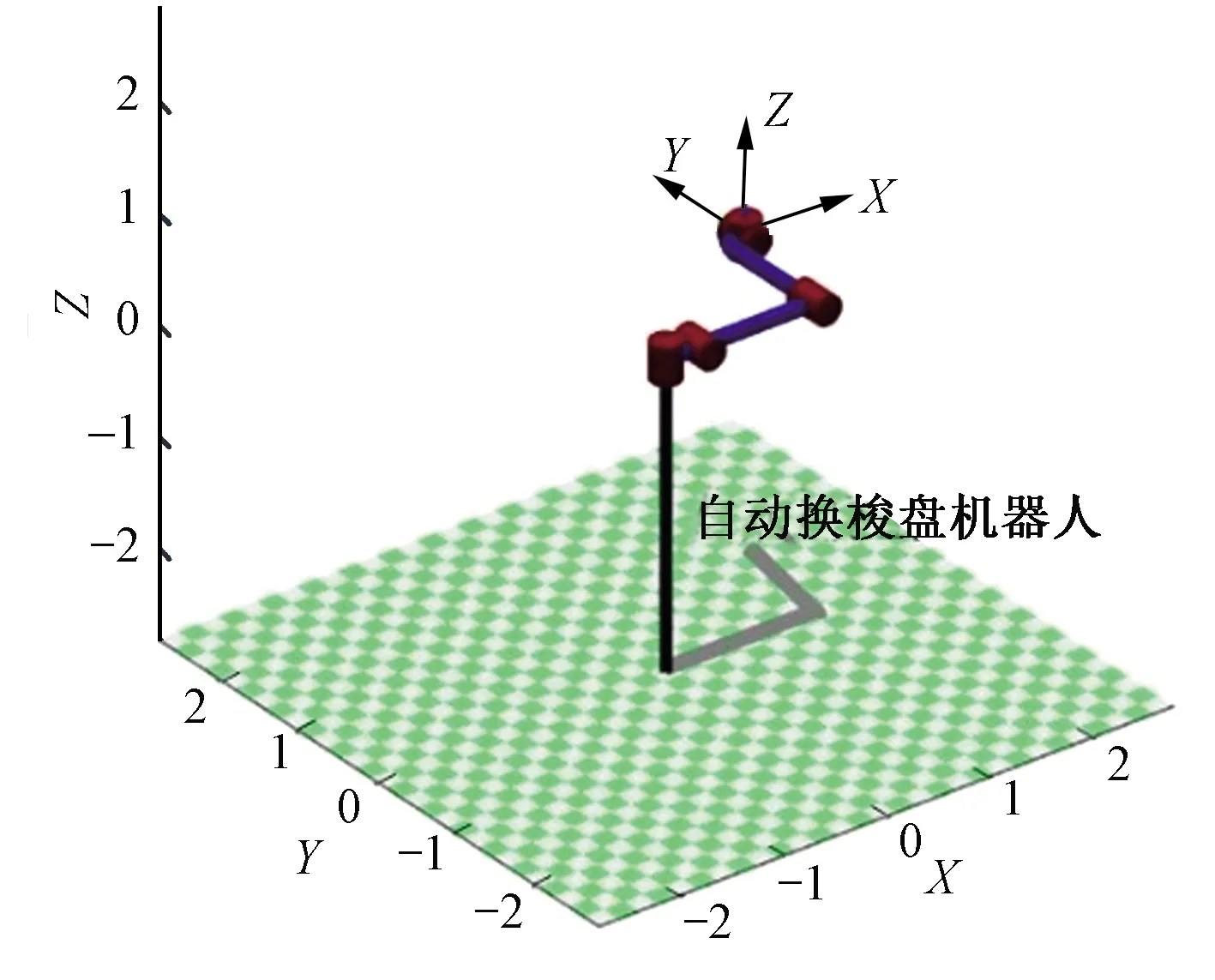
图4 三维平面内机器人抬起梭盘时位姿仿真模型
2.2 逆运动学仿真
机器人运动学包括了正向运动学和逆向运动学。在此对换梭盘机器人的逆向运动学进行仿真分析,逆向运动学是已知机器人末端执行器的位姿求其各关节角度。当换梭盘机器人从织网机上抬起一段梭盘在空间上旋转180°后,即到达位姿T2时,此时机器6个关节转角为q1=[0 π/4-π/4 π π/4 π/2],通过MatLab编程得出机器人在此关节转角下的末端执行器位姿矩阵为G,且
通过换梭盘机器人末端执行器的位姿矩阵G,使用ikine功能函数编程得出了T2位姿下机器人的有一组关节角度为
q2=[0.538 4 0.538 4 -1.266 0 -1.042 7 1.275 3 1.242 9]
由上发现,q1与q2这2组关节角度完全不同,经过仿真发现不同的2组关节角度可以得到换梭盘机器人相同的位姿T2。这是机器人逆运动学的一个特点,证明了某时刻空间机器人任意位姿可以由多组不同关节角度构成。q1与q2这2组关节角度分别对应的位姿模型见图5。
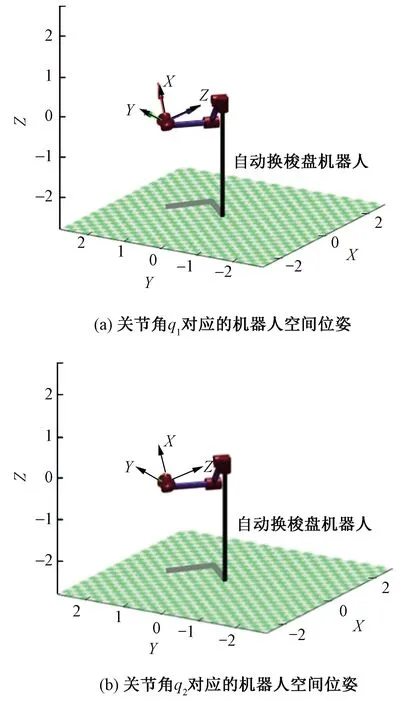
图5 关节角q1和q2对应机器人呈现相同的位姿
3 机器人轨迹规划及仿真
3.1 机器人运动轨迹规划
机器人学中最常见的要求之一是把机器人末端执行器由位姿1平滑过渡移到位姿2。所谓轨迹规划,是指机器人在工作要求下对其运动过程中的位移、速度、加速度等运动参数进行规划[10]。本文采用机器人关节空间中轨迹规划的方法,完成机器人各关节角速度、角加速度、角加加速度的约束与求解。为了验证机器人能达到换梭盘的工作要求,即换梭盘机器人理论上能够足够快地由T1位姿平滑地过渡到T2位姿,采用7次多项式插值,通过MatLab规划关节空间轨迹。实际运行中换梭盘机器人的2个关键位姿T1和T2分别对应的转角为q0=[0 0 0 0 0 0]和q1=[0 π/4 -π/4 π π/4 π/2];表1给出了换梭盘机器人由位姿T1运动到T2时各关节转角变化,通过换梭盘机器人各关节最大转速和关节转角变化这2个参数可求出机器人在2个位姿之间过渡的时间,这个时间就是换梭盘机器人从位姿T1运动到T2理论上的最短时间,也是换梭盘机器人轨迹仿真时的终止时间,计算得出各关节的最短时间见表2。
3.2 机器人运动仿真


图6 机器人各关节角速度仿真曲线
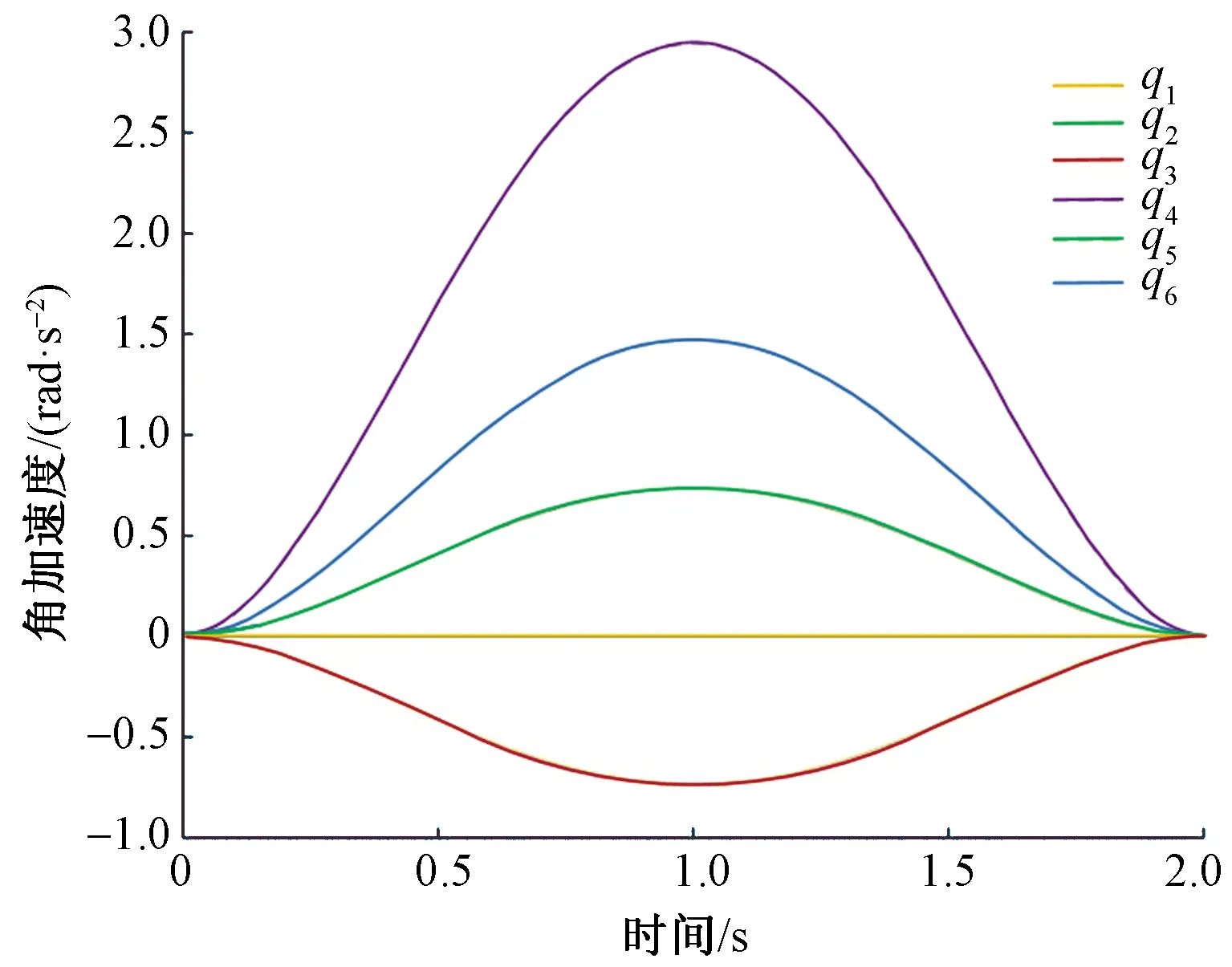
图7 机器人各关节角加速度仿真曲线

图8 机器人各关节角加加速度仿真曲线
由图6~8可知,仿真结果表明自动换梭盘机器人各关节角速度、角加速度和角加加速度曲线连续平稳,无间断和跳跃等现象。在确定关节坐标平滑的同时,可以确定末端执行器在笛卡尔空间中的移动轨迹。末端执行器位置向量的各坐标分量随时间变化的曲线见图9。

图9 机器人末端执行器各坐标分量随时间变化仿真曲线
末端执行器在x-y平面内的轨迹见图10,在研究机器人末端执行器点到点的运动时,指定了其2个端点的坐标,当机器人运动过程中旋转其腰部关节,机器人末端执行器的运动轨迹自然形成圆弧。在实际工作中,应该注意不与附近物体干涉。

图10 机器人末端执行器在x-y平面轨迹仿真曲线
4 结 论
本文在织网机自动换梭盘系统的基础上,以织网机自动换梭盘机器人为对象,通过MatLab建立了机器人仿真模型,对其逆运动学和关节空间轨迹规划进行了仿真,得出了以下结论:
①每组关节转角都可以得出机器人末端执行器的位姿;在逆运动学仿真中,相同末端执行器的位姿可以由几组不同的关节转角实现。
②在关节空间使用7次多项式插值对织网机自动换梭盘机器人2个关键位姿之间进行轨迹规划,仿真过程中其运动性能曲线连续平稳,无间断和跳跃等现象,证明了各关节运动性能良好,达到实际操作环境中换梭盘的要求。
猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
小学生优秀作文(低年级)(2022年4期)2022-04-26
小学阅读指南·低年级版(2021年3期)2021-03-19
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
汽车维修技师(2019年2期)2019-08-23
山东工业技术(2019年16期)2019-07-19
科技与创新(2018年12期)2018-06-22
