基于多传感器的数据采集终端设计
2020-12-14 05:26韩金霞孙方霞
湖南工业职业技术学院学报 2020年5期
韩金霞,孙方霞
(江苏海事职业技术学院轮机电气与智能工程学院,江苏 南京,210000)
随着内河交通运输业的快速发展,水上交通事故时有发生,船舶与桥梁之间、船舶与船舶之间的碰撞事故在内河流域水上交通事故中占有很大的比重[1]。为了保障人民生命和财产安全,做好中小型船舶事故的预防工作,工作人员及时采取相应的避让措施,减少水上交通事故的发生显得极为重要。由于当前较完备的避碰系统大多安装在大型船舶上,因其价格昂贵,很难在中小型船舶中得到普及,因此设计一款低成本的船舶防撞预警装置显得十分重要。
基于以上情况,本文设计了一套基于多传感器[2]的测距采集终端,通过传感器测量船舶与桥梁、船舶与船舶之间的航行距离,与预先设置的安全距离进行对比,实现安全预警的功能,以提醒工作人员及时采取避让措施,降低水上交通事故的发生率,保障内河水上交通安全。针对单个传感器测量的准确性问题,本文采用了激光雷达和超声波两种传感器进行安全距离或安全高度的测量,并预留RS485 接口,以便与控制终端进行通信,实现控制终端对多个采集终端进行集中控制。
1 总体方案设计
基于多传感器的数据采集终端设计框图如图1 所示。
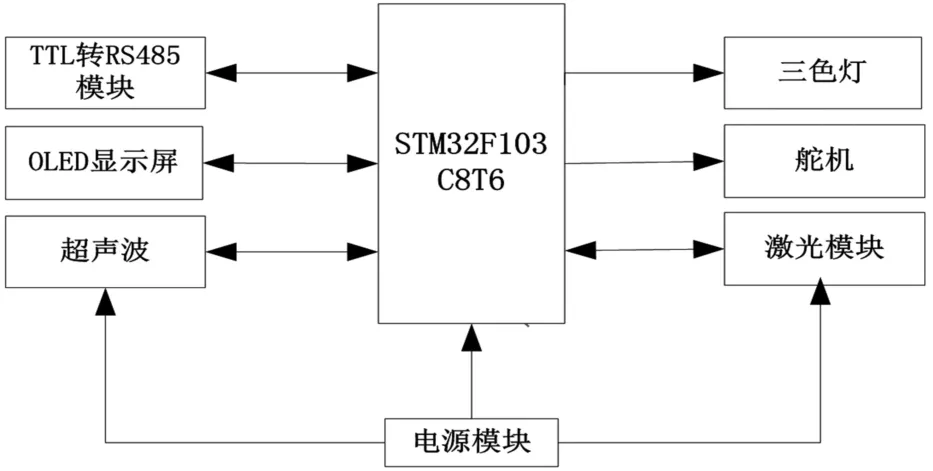
图1 总体设计框图
该系统终端主要包括超声波传感器、激光雷达传感器、舵机、三色灯、OLED 显示屏、TTL 转RS485 模块、单片机和电源几个部分组成。该系统的核心处理芯片采用了ST 公司的STM32F103 C8T6,它是一款基于ARM Cortex-M 内核STM32系统的32 位的微控制器,具有64KB 的闪存,3 个通用定时器[3],2 个I2C 和USART 接口,工作电压在2-3.6V。STM32F103C8T6 单片机分别通过USART 接口和I2C 接口获取超声波传感器和激光雷达传感器采集的数据,通过与预先设置的安全距离进行对比、分析,获取当前的具体情况,判断是否要进行安全预警。如果进行报警,将通过蜂鸣器和三色灯进行声光报警,并将报警信息通过OLED 显示屏进行显示。该系统还通过USART 接口外接TTL 转RS485 模块,以便与控制终端通过RS485 总线进行通信,实现控制终端对多个采集终端进行集中控制[4]。
2 系统硬件设计
基于多传感器的数据采集终端主要包括超声波和激光雷达两种传感器。超声波传感器采用深圳电应普科技的超声波防水测距传感器,该传感器支持多元化输出端口设定,可支持UART 输出、PWM 输出及IO 口直接输出,本文采用第一种UART 输出方式,将超声波的UART 接口与主控芯片STM32F103C8T6 的USART1 接口进行连接。激光雷达传感器采用北醒光子科技有限公司的TFmini Plus 激光模块,它是一款小型化、单点测距的产品,支持UART 和I2C 输出两种方式,本文采用的是IO 口模拟I2C 的输出方式,通过STM32F103C8T6 单片机的GPIO 口进行I2C 的时钟和数据信号的模拟。
超声波和激光传感器的电路接口设计如图2所示。
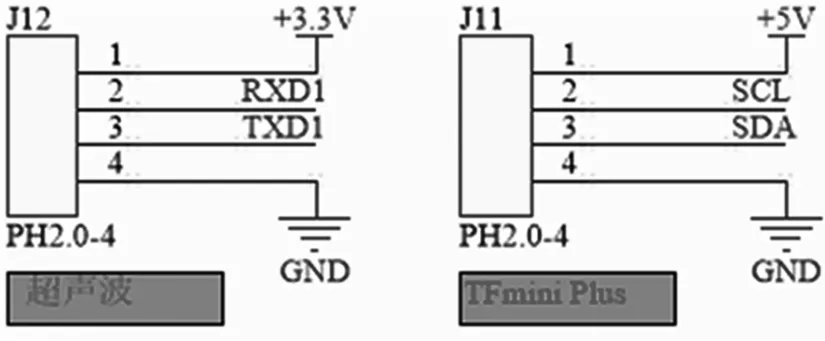
图2 超声波和激光传感器电路原理图
为了增加系统测量的准确性,数据采集终端添加了MG995 舵机,并将超声波和激光传感器安装于舵机上,随着舵机的转动采集多方位的数据,增加测量的准确性。MG995 舵机硬件连接需要三根线:VCC、GND 和信号线。控制信号线一般是周期为20ms 的PWM 信号,本设计采用STM32F103 C8T6 单片机TIM 功能输出PWM 波来控制舵机。舵机接口电路如图3 所示。
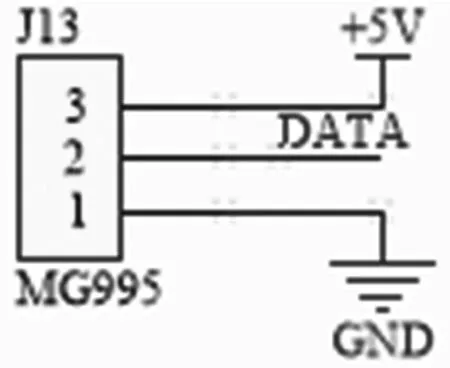
图3 舵机接口电路
传感器采集到的数据如果小于预先设置的安全距离时,数据采集终端会进行声光报警。本系统通过三色灯和蜂鸣器进行声光报警,三色灯接口电路如图4 所示。
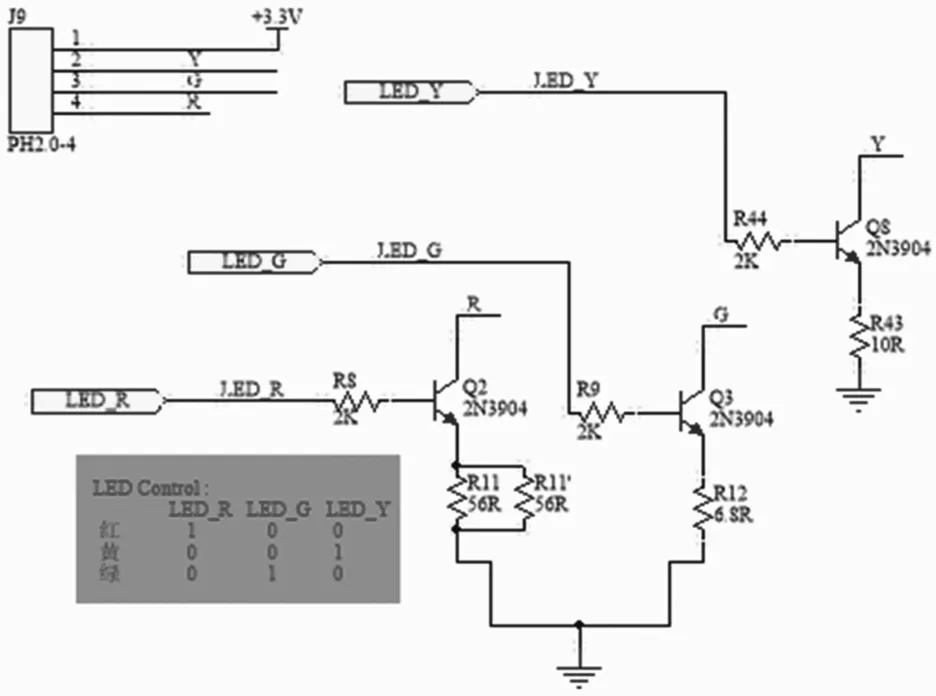
图4 三色灯接口电路图
3 系统软件设计
基于多传感器的数据采集终端主程序软件流程图如图5 所示。
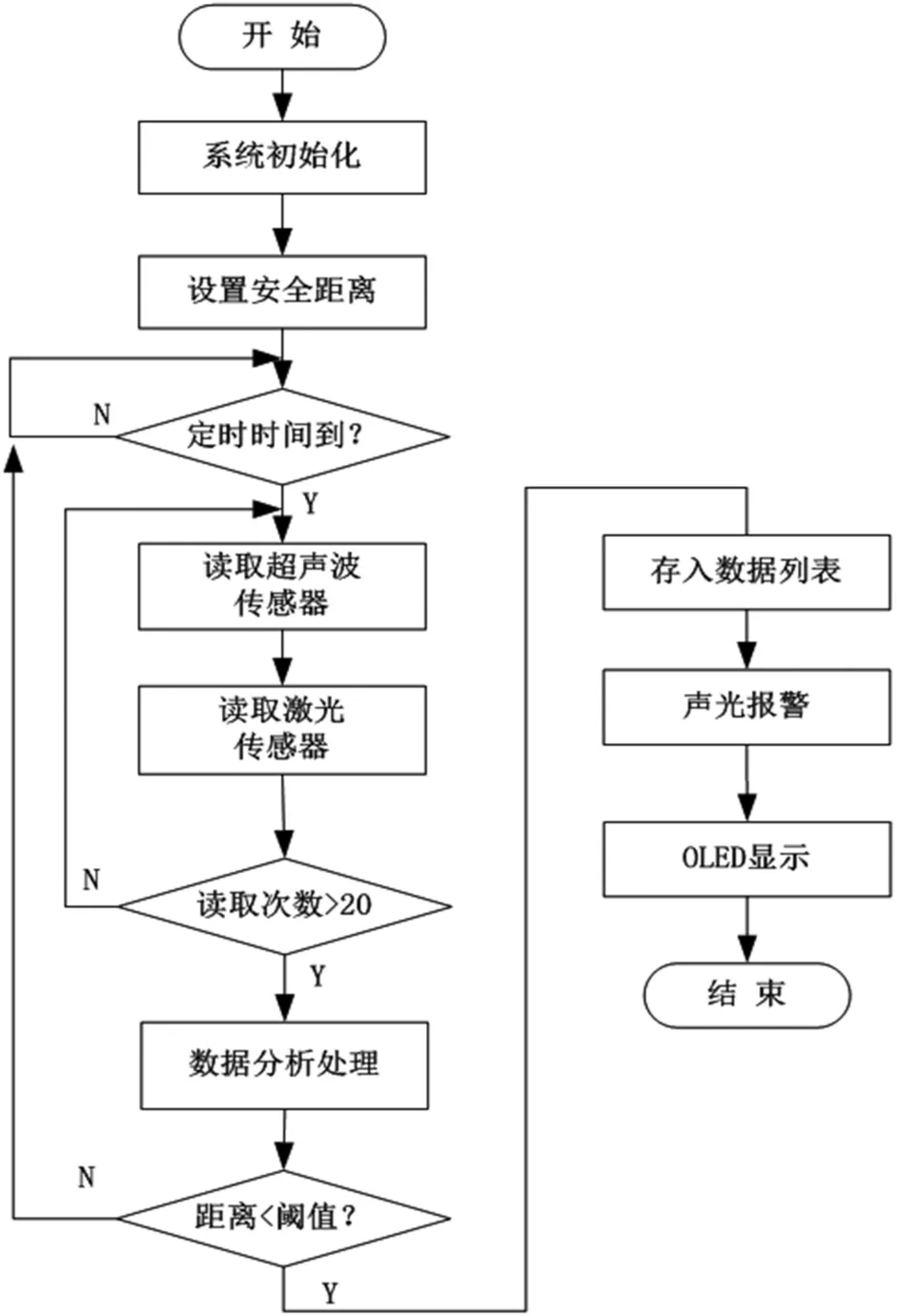
图5 数据采集终端主程序软件流程图
系统上电后,首先进行系统的初始化配置,完成STM32F103C8T6 的 系 统 时 钟、GPIO 口、USART、外部中断和通用定时器初始化设置,以及安全距离的阈值设置;由于激光传感器采用了IO 口模拟I2C 的方式与单片机进行通信,因此也要进行I2C 的初始化配置。初始化完成后,启动定时器,每隔一定的时间STM32F103C8T6 通过USART1 和IO 口读取超声波和激光传感器的测量数据,并进行缓存;单片机多次读取数据后,对其进行分析处理。如果测量的数据小于预先设置的安全距离时,首先将报警信息存入缓存列表,以供控制终端远程获取数据,然后将报警信息显示在OLED 屏上,并通过蜂鸣器进行声音报警,同时根据测量的数据所属范围三色灯进行不同程度的灯光提示。为了增加系统测量的范围,该采集终端还添加了舵机,将超声波和激光传感器安装在舵机上,传感器跟随舵机的转动而进行不同方位的测量。
4 结语
中小型船舶特别是渔船由于经济实力不足无力安装昂贵的避碰系统,从而容易发生船舶间、船舶与桥梁间的碰撞事故。本文设计了一种基于多传感器的数据采集终端,该系统以STM32F103 C8T6 单片机为核心芯片,通过超声波和激光传感器进行船舶间、船舶与桥梁间安全距离的采集,如果采集到的安全距离数据小于预先设置的阈值,数据采集终端会进行声光报警,提示工作人员及时采取避让措施。由于船舶体积较大,单个采集终端不能准确获取船体各个方向的情况,在实际应用中,需要在不同部位安装多个采集终端,为了使控制终端可以同时控制多个采集终端,本设计拟采用RS485 总线方式与控制终端进行通信,因此预留USART 接口以便外接TTL 转485 模块,供后续系统设计使用。
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年1期)2018-04-04
军事文摘·科学少年(2016年7期)2016-09-20
航空模型(2016年5期)2016-07-25
电子制作(2016年21期)2016-05-17