
南疆地区棉花基肥深施机的研究
2020-12-14 02:29李建军侯宝华何义川
湖北农机化 2020年19期
李建军 侯宝华 何义川
(塔里木大学机械电气化工程学院,新疆 阿拉尔 843300)
0 引言
新疆棉花总产量已连续20多年位居全国第一位,占全国棉花种植面积的80%。南疆地区棉花平均亩产在500kg左右。种植过程中施肥管理是增产的重要方式之一,施肥已成为农业生产中不可或缺的一部分。中国现已成为世界上农业大国之一,目前农民追求增产的盲目性和过度性的行为,以及不科学不合理的施肥方法导致化肥使用效率低下,肥料浪费和土壤污染等[1-2]。
目前南疆地区棉花的机械化施肥主要有苗期追肥、播种施种肥和秋季撒施基肥3种方式[3]。南疆地区棉花种植普遍使用地膜覆盖,因此苗期追肥不利于中耕作业;在播种过程中进行施肥作业,容易烧苗,且只能适于棉花生长初期;秋季通过犁撒施基肥,肥料堆积现象严重,不均匀,不科学、不合理的施肥方式急需解决[4]。
我国学者对机械化合理施肥开展了大量的研究[5-7]。刘进宝等人为了满足施肥与增效的要求,提出一种多层施肥机构,并对机构的重要部分进行受力分析[8],设计了一种棉花基肥对行分层深施机,为南疆地区棉花种植过程中科学合理地施肥提供依据。
1 基肥深施机结构设计
1.1 总体结构
基肥深施机主要由开沟铲、分层施肥器和覆土机构组成。分层施肥器设置在施肥箱的上方;施肥箱的外槽轮排肥盒与开沟分层施肥器相连接;开沟施肥器的开沟铲与机架相连接,其正后方设置覆土装置。其中实际作业行距可以调节,开沟施肥器和覆土装置的作业幅宽方向设置6组。
1.2 工作原理
棉花在南疆地区以秋施春播的分层交错模式种植,保证肥料的效能和使用量,秋季分别对10~13cm和18~20cm土壤层施肥,通过冬季保墒,肥料完全融化在窄行土壤中;春季采用3s技术在肥行上播下种子,实现对行作业,其误差在2cm左右。
2 重要机构设计及受力分析
2.1 开沟分层施肥器的研究
2.1.1 开沟分层施肥器机构设计
开沟铲部件和分层施肥器是该机构的重要组成部件,实现对土壤的开沟和分层施肥作业。其中开沟铲的铲尖为槽型深松铲,铲柄为轻型柄;分层器由送肥管、调节挡板和排肥口组成。肥料颗粒通过排肥管分别从浅层和深层排肥口滑出,同时调节横向调节板与竖向调节板的长度,控制浅层排肥口处通道的尺寸大小。排肥管下口设置为扁状,减小碰撞作用。
2.1.2 开沟铲受力分析
依据耕作土壤动力学模型[9-10],分别对开沟铲的倾斜铲尖和圆弧铲柄受力进行分析。
(1)铲尖受力分析

图1 铲尖受力分析图
倾斜铲尖受力部分如图1a所示,根据图中的受力分析得出倾斜铲尖在水平方向的平衡方程:
F2=N0sinδ+μ1N0cosδ+Fb
(1)
式中,Fz是牵引力;N0是铲尖斜面所受法向载荷;Fb是土壤对铲尖的切削阻力;μ1是土壤与铲尖表面的摩擦系数;δ是铲尖入土角。
铲尖相对于土壤的切削阻力忽略不计,则土块在铲尖上水平和垂直方向的受力情况如图1b所示,
N0(sinδ+μ1cosδ)-N1(sinδ1+μcosδ1)-(FcSa+Fg)cosδ1=0
(2)
G-N0(cosδ-μ1sinδ)-N1(cosδ1-μ1cosδ1)+(FcSa+Fg))sinδ1=0
(3)
式中G是土壤重力;N1是失效面法向载荷;Fg是土壤加速力;Fc是土壤内聚力;Sa是前剪切失效面面积;μ是土壤内摩擦系数;δ1是前失效面的倾角。
开沟过程中土壤阻力与牵引力为一对平衡力,由公式(1)、(2)、(3)解得:
(4)
为简化上式,令:
(5)
则公式4可表示为:
(6)
其中土壤加速力
(7)
m是被加速的土壤质量;v是被加速土壤的速度;tg是加速时间。
因此,当前进速度一定时,牵引阻力大小主要由铲尖处对应的土壤体积决定,可知牵引阻力由根本铲尖长度和入土角决定。
(2)铲柄受力分析
依据西涅阿可夫关于切削部件作用于土壤后受力状态的力学模型理论[11],土壤耕深小于20cm时,为纯切削受力状态,如图2所示。根据铲柄在前进方向的平衡状态可得:
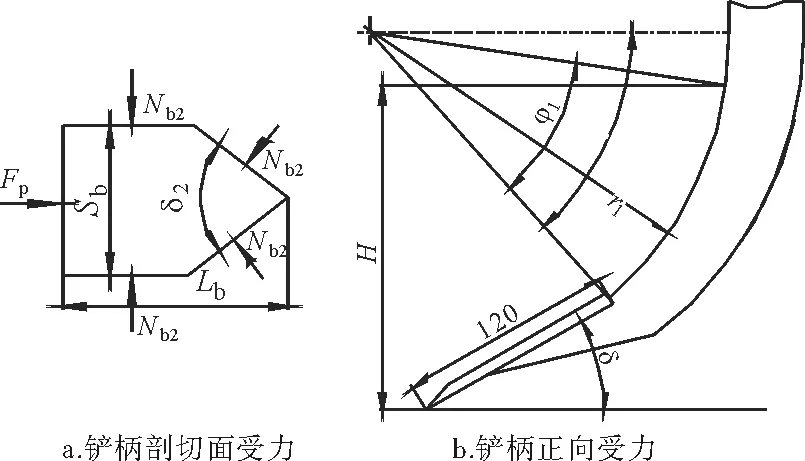
图2 铲柄受力分析图

(8)
式中Fb1是铲柄上的阻力;Nb1是楔刃法向力;Nb2是侧刃法向力;μ2是滑动摩擦系数;δ2是铲柄楔角。
其中:Nb1=k1A1
(9)
Nb2=k2A2
(10)
式中k1是土壤变形比阻;k2是土壤的比压;A1是铲柄楔刃面积;A2是铲柄侧刃面积。
(11)
为了减小开沟阻力,铲柄圆弧段入土深度为19cm;铲尖长度为12cm,入土深度为25cm。
(12)
(13)
由公式(11)、(12)、(13)可得,土壤特性和入土深度一定时,铲柄阻力大小主要由入土角、铲柄楔角、铲柄厚度和宽度以及铲柄圆弧半径和对应的圆心角等因素决定。
2.1.3 土壤扰动分析
开沟作业过程,土壤受到开沟铲的扰动作用呈沟渠状,如图3所示。当开沟铲结构尺寸确定后,土壤扰动产生的沟型尺寸与作业速度有密切关系。

图3 土壤扰动沟型图
在阿拉尔市棉花种植区研究土壤开沟过程的流动性和回落覆盖过程,开沟速度设定为6km/h,随机测量5次,求得测试平均值,初步测得开沟后土壤表层的尺寸分布,间接测量回土深度,依据耕深与未回土区域的深度差计算的尺寸如表1所示。试验数据表明,开沟铲对土壤的扰动和回流现象影响比较明显,需要进行覆土填埋作业。

表1 土壤沟型尺寸
2.1.4 肥料颗粒运动分析
肥料颗粒通过送肥管到达施肥器中,并在其中受到颗粒间的碰撞力和分层施肥器对肥料颗粒的作用力,如图4所示。
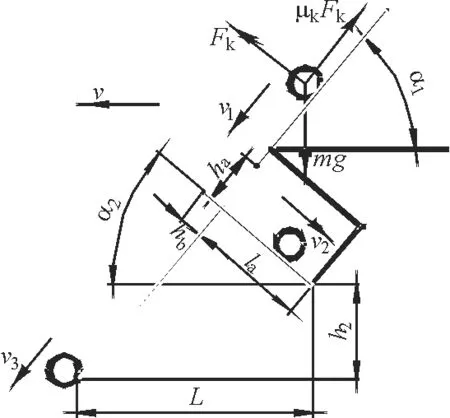
图4 肥料颗粒受力情况
根据肥料颗粒在底板受力情况可得:
(14)
式中m是施肥质量;v1是肥颗粒下滑速度;α1是底板倾角;μk是肥颗粒与底板摩擦系数,Fk是底板对肥颗粒的支撑力。
由动能定理可知,肥颗粒所合外力为:
Fctc=mv′-mv1
(15)
式中v′是碰撞后的速度;Fc是肥颗粒所受合外力;tc是碰撞时间。
由动能定理可知,分析肥颗粒在排肥管和施肥器中的支撑力。
(16)
(17)
式中v2是浅层管排肥速度;v3是深层管排肥速度;Fk1是管壁对颗粒的支撑力;α2是浅层排肥口滑道倾角。
2.2 覆土装置设计
覆土装置安装在开沟分层施肥器后方设置,由刮土板、连接臂、安装座和仿形弹簧组成。左右覆土板呈八字状,左右覆土板间距与夹角可进行调节。根据图7所示的开沟铲土壤扰动情况,覆土作业应满足以下条件:
S1>B1
(18)
S2 (19) 式中S1是刮土板前开度;S2是刮土板后开度;S4是刮土板长度;(s1是刮土板与水平的夹角; 利用笛卡尔坐标系分析刮土板对土壤的推力F与作业速度的关系。 (21) (22) (23) 式中vx是土壤横向速度;vy是土壤前进方向速度;vz是土壤竖直方向速度;mt是土壤质量;Fn是刮土板对土壤的推力;Fn1是地表对土壤的支撑力;t为时间;αs是刮土板对地倾角;αs1是刮土板与前进方向夹角;μ是土壤内摩擦系数;μ3是土壤与刮土板间摩擦系数。 2020年11月在阿拉尔市12团棉花种植基地进行试验,选用安装有北斗导航拖拉机自动驾驶系统的雷沃754轮式拖拉机在秋季犁耕并初步平整的棉花地进行试验。设定施肥量为20kg/亩,作业速度为6km/h,深层施肥比例为60%,随机选取10个测量点。试验结果见表2。 表2 田间试验数据 试验结果表明:1)每亩棉花用肥量均是21.4kg,变异系数是4%,每亩用肥量稳定;2)深层开沟施肥深度均是19.8cm,说明深度施肥较稳定;3)刮土板相对地面的倾角75°;刮土板与前进方向的夹角23°,肥料覆盖率达100%。4)浅层开沟施肥深度均是12.5cm,但测试点中有一组深度为19cm,说明分层稳定差。 (1)为了满足南疆地区棉花基肥深施的特点,设计一种对行分层深施机,分别对基肥深施机的重要机构、开沟铲受力情况、覆土装置结构行了分析。 (2)田间试验,南疆地区棉花用肥量21.4kg/亩左右,变异系数为4.0%,亩用肥量稳定;开沟深层施肥深度是19.8cm左右,而浅层肥料深度是12.4cm左右,但稳定性偏低,与土壤环境和机具作业速度相关,为研究基肥深施机奠定基础。3 田间试验分析

4 结语
猜你喜欢
中国土壤与肥料(2021年5期)2021-12-02
中国土壤与肥料(2021年5期)2021-12-02
今日农业(2021年19期)2021-11-27
农业与技术(2021年21期)2021-11-17
新疆农机化(2021年5期)2021-10-24
今日农业(2021年9期)2021-07-28
果农之友(2021年4期)2021-06-29
福建林业科技(2020年4期)2020-12-31
天津农林科技(2020年5期)2020-10-21
种子(2020年6期)2020-07-09
