防碰撞安全监控系统在DG水电站起重施工中的应用
2020-12-14 08:00:48郑红伟张华军
水电与新能源 2020年11期
郑红伟,张华军,张 剑,蒋 理
(1.华电西藏能源有限公司大古水电分公司,西藏 山南 856000;2.中国电建集团贵阳勘测设计研究院有限公司西藏DG水电站主体工程建设监理部,西藏 山南 856000;3.中国水利水电第七工程局有限公司,四川 成都 611130)
1 防碰撞安全监控系统技术应用背景
起重机械是大型水电站工地中常见的设备,能够在水平和垂直方向搬运物料,对节省人力和加快施工进度有着非常重要的意义。但是一方面,水电工程施工场地狭窄,另一方面,施工效率和现场吊装要求高,将多台不同类型的起重机同时布设在一个施工场地施工,及其容易出现交叉作业(见图1)。起重机的作业空间出现重叠,可能出现干扰和碰撞,为了保证安全生产,需要对现场起重设备加装防碰撞安全监控系统。

图1 DG水电站施工现场起重机布置图
DG水电站施工强度高、现场生产区域狭窄,同时起重机作业范围大,施工情况复杂,配置了4台MZQ1000门机、1台MQ900B塔机、2台QTZ200塔机、1台QTZ900塔机、1台QTZ1200塔机及1台套30T固定式缆机等配合作业,交叉作业多,存在较大安全隐患。
针对DG水电站施工起重吊装作业情况,防碰撞安全方面存在以下问题:①在起重吊装吊装过程中起重机可能与其他设备设施碰撞,造成设备的损失和安全事故;②起重吊装设备指挥人员、司机在盲吊过程中,关注点不同且存在操作盲区,造成指挥的失误,因而导致安全事故;③由于缺乏起重设备运行记录,部分设备的保养和维修只能根据以往工作经验进行,比较容易出现安全隐患;④由于没有设备运行记录数据的存储,只能通过发生事故以后的结果和目击证人来分析推断,对不安全事件和事故难以科学严谨的分析判断。这就是防碰撞安全监控系统亟待解决的部分问题。
2 防碰撞安全监控系统基本内容
DG水电站目前采用的防碰撞安全监控系统是通过增加吊钩高度传感器和角度传感器实现检测吊钩的高度(X/Y轴的空间范围);通过监测吊钩高度和臂杆角度和回转范围,限制吊钩在XYZ轴三维空间的安全工作区域;在门机与塔机、缆机的重要部位安装毫米波雷达或者接近报警探头,防止设备与起重吊装设备间碰撞。该系统利用起重吊装设备力矩系统内的吊臂角度/幅度参数;建立多台设备的组网,互相通讯。起重吊装设备空间限位系统、视频监控系统、力矩系统带设备运行数据记录,而且可以利用外接移动存储设备,导出相应运行的轨迹图和相关数据记录、实时视频,为分析和判断提供数据依据。
防碰撞安全监控系统整体框架如图2所示,系统利用起重吊装设备力矩系统内的吊臂角度/幅度参数;建立多台设备的组网,互相通讯。起重吊装设备空间限位系统、视频监控系统、力矩系统带设备运行数据记录,而且可以利用外接移动存储设备,导出相应运行的轨迹图和相关数据记录、实时视频,为分析和判断提供数据依据。
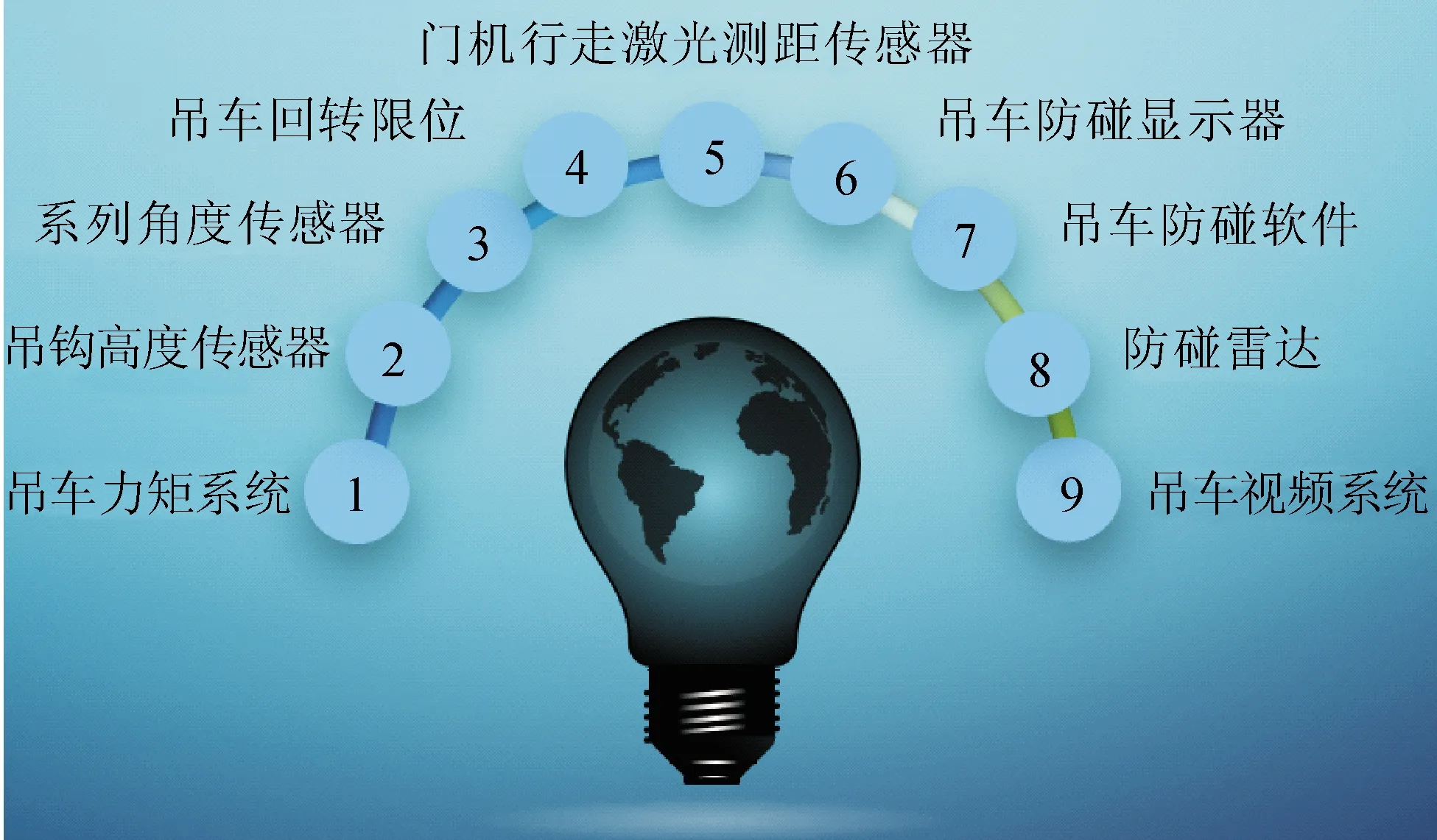
图2 门机防碰撞安全监控系统组成图
3 防碰撞安全监控系统关键技术应用
防碰撞安全监控系统关键技术内容包括:①防碰撞安全监控系统采用三种不同技术融合组成,比单一技术更保险;②防碰撞安全监控系统采用实时监测显示预警功能,提前警示操作人员,预防可发生的风险;③实时记录起重设备运行数据,事故发生后,为开展事故调查、追责以及复盘总结,避免同类事故再次发生提供依据。在保障现场生产的前提下,为现场各部门安全管理工作提供数据支撑,让起重设备的安全管理工作更精细、更高效。
防碰撞安全监控系统包括:主动防碰撞、被动防碰撞和辅助防碰撞三个方面(见图3)。
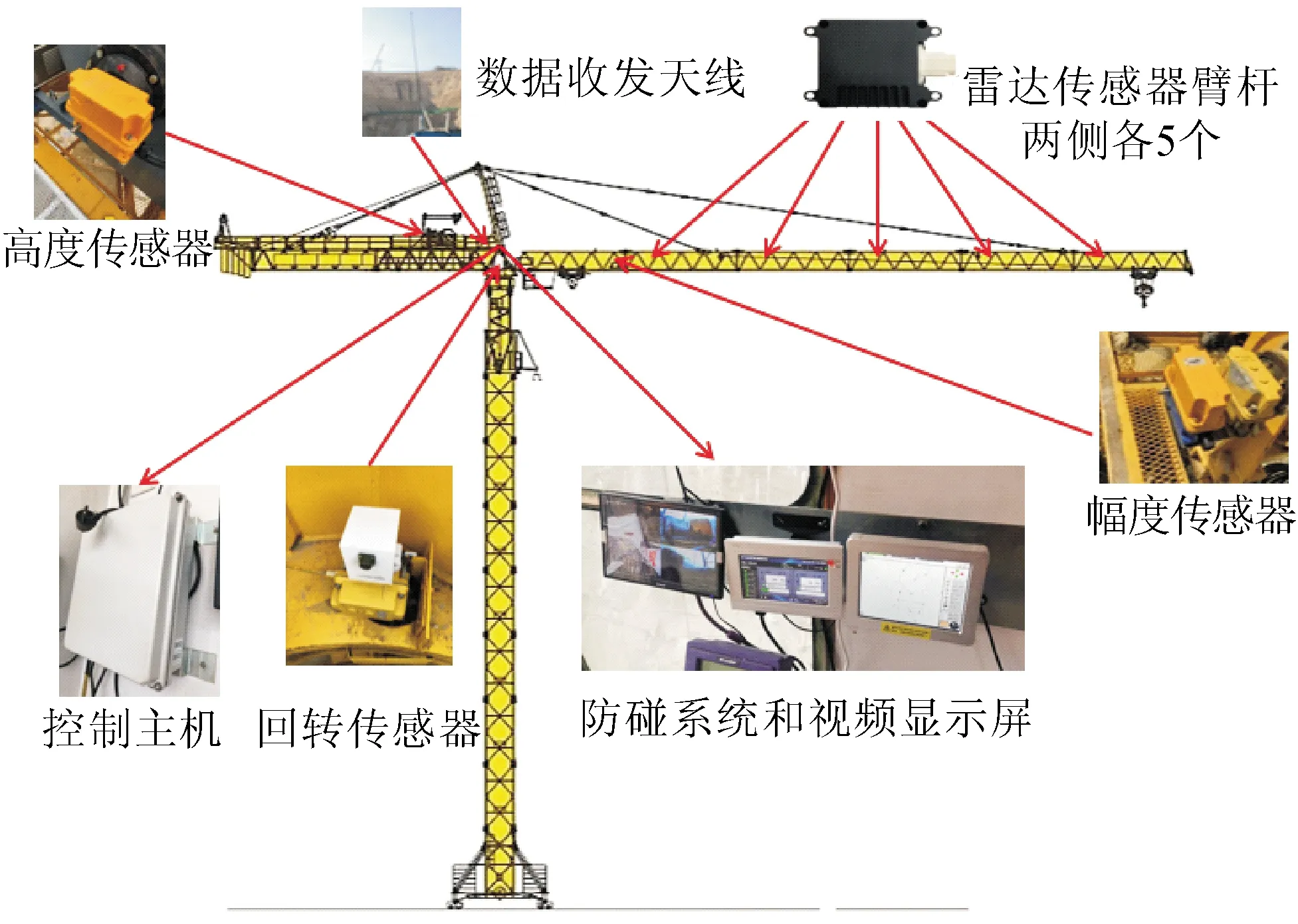
图3 塔机防碰撞安全监控系统部分硬件图
3.1 被动防碰撞系统
被动防碰撞的基于三维空间模拟,通过在起重设备上安装多个传感器,采集高度、角度、幅度、方位等数据,并配以测量的空间坐标系,各个起重设备上模拟出本机的实时空间状态,同时相互通讯、相互检测是否存在碰撞的风险,同时也能预警起重机械回转半径内有可能碰撞山体这类非设备的危险。
目前DG水电站使用的塔吊防碰撞系统只是针对塔吊的幅度,高度,相对来说还是比较容易实现,塔吊的变量只有两个参数,在现场门式起重机系统上,变量参数多,如臂杆角度,高度等,在防碰撞安全监控系统研发上增加软件数据处理难度。
另外,这种方法要求通信链路必须可靠,其中1台主机出现问题都有可能导致所有通讯出现问题,数据包丢失,将对起重机械的安全作业带来隐患。所以在无线网络上,相邻吊装设备之间必须要无线通讯可靠,目前DG水电站防碰撞安全监控系统采用数据电台式,但是此类传输台式存在工地现场环境影响,因而,主动防碰撞和辅助防碰撞系统应现场需求而产生。
3.2 主动防碰撞系统
鉴于被动检测系统,对于障碍物不能主动探测,在现有的基础上,在DG水电站应用了一种通用型的方便拆卸的主动防碰撞系统。
克服在空间上存在各类吊装起重设备的碰撞问题,为了解决这一问题,类似于汽车倒车雷达的工业防碰撞技术首次在DG电站进行应用。该技术的关键硬件是毫米波雷达传感器,通常毫米波是指30~300 GHz频域(波长为1~10 mm)的。其中24 GHz雷达传感器、77 Ghz雷达传感器主要用于汽车防撞。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同厘米波雷达相比,毫米波雷达具有体积小、易集成和空间分辨率高的特点。与摄像头、红外、激光等光学传感器相比,毫米波雷达穿透雾、烟、灰尘的能力强,抗干扰能力强,具有全天候(大雨天除外)全天时的特点。针对毫米波雷达的特性可以很好的用在施工场地恶劣的环境中(见图4)。

图4 毫米波雷达传感器图
主动防碰撞基于雷达测距原理,雷达发射机发射电磁波,在电磁波遇到目标后,将沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被雷达天线获取,通过计算发出和返回的时间乘以光速常量就是当前物体实时距离,在臂杆上由多个雷达天线组成的雷达阵列,能使整条臂杆探测出周围物体的距离(如钢丝绳)。
此项技术能有效的减轻操作人员负担,能24 h不间断服务,同时在夜晚视线不良情况下,能提供与白天一样的监测能力,提高安全可靠度。
3.3 辅助防碰撞系统
辅助防碰撞系统基于安装在起重机械其他部分关键部位的摄像头,通过司机驾驶室视频监控画面能实时以高清晰图像向塔吊司机展现吊钩及设备周围实时的视频图像,使司机能够快速准确的做出正确的操作和判断,解决了施工现场塔吊司机的视觉死角,远距离视觉模糊,语音引导易出差错等行业难题,进而实现人机之间更好的交互,提高吊车司机工作效率(见图5和图6)。

图5 吊钩小车上摄像头

图6 司机驾驶室视频监控画面
4 结 语
本文基于高原DG水电站安全施工的防碰撞安全监控系统,该系统利用主动防碰撞系统、被动防碰撞系统、辅助防碰撞系统解决了施工现场的起重机之间干扰甚至碰撞、设备之间无法通讯,人机之间无法交互等问题。后期可利用远程监控平台分析防碰撞安全监控系统中实时与历史数据,综合评估施工现场安全状态,形成反违章管理闭环,进而建立基于起重机管理维度、远程监控维度、施工监管维度、项目管理维度等多维度的智慧吊装生态系统。
猜你喜欢
华人时刊(2023年11期)2023-07-29 06:27:38
西北水电(2022年1期)2022-04-16 05:20:06
金桥(2021年8期)2021-08-23 01:06:54
山西冶金(2020年3期)2020-07-15 04:15:04
中国特种设备安全(2018年10期)2018-12-18 02:16:46
石油化工建设(2018年2期)2018-07-11 01:24:56
水利技术监督(2016年6期)2017-01-15 14:01:41
船舶标准化工程师(2015年5期)2015-12-03 11:00:24
铸造设备与工艺(2015年3期)2015-07-11 04:02:54
水电站机电技术(2014年5期)2014-09-26 12:02:20