
基于遗传算法的长输管道PID控制参数优化
2020-12-10 09:02:22任亮许超中国天辰工程有限公司天津300400中国石油工程建设有限公司北京000
化工管理 2020年33期
任亮 许超(.中国天辰工程有限公司,天津 300400;.中国石油工程建设有限公司,北京 000)
0 引言
PID控制具有算法简单、鲁棒性好和可靠性高等特点,被广泛应用于长输管道压力选择性控制系统。长输管道PID控制通过调节阀实现,控制系统持续监测实际压力与设定压力之间的偏差并不断修正,实现自动调整阀位。PID控制提高了管道压力控制精度,消除了内部扰动,保持了压力的平稳,降低了调度员工作强度,与传统手动阀位控制相比具有明显优势。可以说,长输管道自动化水平的高低,可以用是否采用PID控制来衡量。近年来新建管道投产过程中,均同步进行PID参数整定,以便管道正常运行时能投用控制功能。
1 系统辨识
某管道是多种油品顺序输送的成品油管道,利用SPS动态仿真软件建立符合现场实际的仿真模型,为泵站控制器PID参数寻优奠定了基础。西南泵站是某管道的中间泵站,具有增压、高低压泄压和收发清管器等功能。西南泵站采用进站压力和出站压力PID选择性控制[1]。选择性控制是双PID切换的控制方式,对中间泵站的进站和出站压力均设定压力值,控制原则是:防止进站压力超低和出站压力超高,对不同的运行工况,可在进站控制和出站控制间进行自动切换。
以西南泵站出站压力为被控对象,其控制品质取决于西南泵站出站压力控制器PID参数。PID控制器参数整定的方法较多,概况起来有两大类:一是工程整定法,常用方法包括临界比例度法、衰减法和反应曲线法等,其共同特点是通过对实际系统试验取得相关数据,再按照相应的经验公式对PID控制器进行参数整定,方法简单,不要求掌握被控对象模型,但是控制效果不太令人满意;二是理论计算法,该方法根据系统的数学模型,经过理论计算得到控制器参数。本文采用理论计算法,基于遗传算法对西南泵站出站压力PID控制系统参数进行优化。
采用理论计算法对PID控制系统设计首先要建立被控对象的数学模型。由于长输管道系统较为复杂,机理建模存在一定的局限性,故采用系统辨识对管道被控系统进行建模,确定其传递函数,以便进行控制系统的设计。
系统辨识是以系统的输入输出数据为基础,在一系列给定的模型类中,确定一个与研究对象等价的数学模型,系统辨识[2-3]可分为4步:(1)设计实验,明确对哪些变量进行测量、系统的工作状态以及输入信号的设计等,获得待辨识系统的输入和输出数据。(2)选择模型结构,根据对被控对象的了解,确定使用哪类模型。(3)对模型进行参数估计,选择参数估计方法(最小二乘准则、极大似然准则等),得到模型的参数估计值。(4)确定等价准则,评价系统辨识所得模型与实际过程的拟合程度。
获取被控对象动态特性的常用方法是阶跃响应法,即在被控对象的输入端施加一个阶跃响应,监测被控对象的输出从而得到飞升曲线[4]。在SPS仿真模型中切断控制器,在稳态下手动改变调节阀开度,即施加阶跃扰动。工程应用中一般取信号幅值为额定值的3%~5%,T=0s时刻将西南泵站调节阀开度由0.222升高至0.3,记录西南泵站出站压力随时间变化的响应特性曲线。
随后利用MATLAB系统辨识工具箱获取被控对象传递函数[5-6]。对系统辨识工具箱提供的21种传递函数类型分别进行辨识,辨识结果和各自的拟合度见图1。
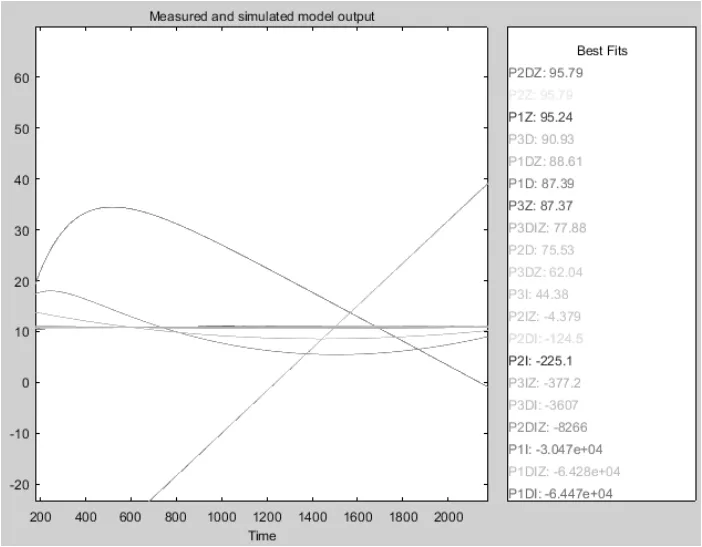
图1 实际模型和测量模型的输出曲线
根据图1的系统辨识结果,拟合度最高为95.79%,对应的的被控对象传递函数如下:

2 遗传算法寻优
遗传算法通过对参数空间编码并用随机选择作为工具来引导搜索过程朝着更高效的方向发展。正是由于遗传算法独特的工作原理,使它能够在复杂空间进行全局优化搜索,具有较强的鲁棒性。另外,遗传算法对于搜索空问,基本上不需要限制性的假设。
基于遗传算法进行PID参数寻优,首先确定PID参数范围,根据输油管道实际情况,确定PID参数Kp、Ki、Kd的取值下限和上限分别是[0,0,0]和[100,100,0],对参数进行二进制编码,该二进制字串为遗传算法的操作对象。然后确定合适的目标函数,为了均衡控制系统效果,获取满意的过渡过程动态特性,引入误差积分指标IAE、超调量指标和调节时间指标,设计了变权综合性目标函数[7-8]:

式中:e(t)为系统误差;u(t)为控制器输出;tu为上升时间;w1、w2、w3为权重。
接下来应用复制、交叉和变异算子对种群进行操作,复制概率大的在下一代中将有较多的子孙,反之会被淘汰,随后进行单点交叉,最后进行变异,交叉概率和变异概率可根据实际情况选取。这样初始种群通过复制、交叉和变异得到新一代种群,该代种群经解码后代入目标函数,观察是否满足约束条件,若不满足,则重复上述步骤直至参数收敛或到达预定指标。
对于遗传算法,取交叉概率为0.9,变异概率为0.03,样本个数为30,选取两组不同的权重w1、w2、w3,经过100代进化,可得两组控制器参数,一组是:Kp=9.694,Ki=70.246,Kd=0,另一组是:Kp=3.612,Ki=3.978,Kd=0。将遗传算法得到的PID参数应用于SPS仿真模型,临界比例度法参数作为对比,得到西南泵站出站压力控制回路阶跃响应曲线,见图2。
衡量PID控制系统的指标有三个:稳定性、准确性和快速性。稳定性是系统受到干扰后,控制系统能恢复到一个收敛的平衡状态;准确性指被控参数的实际值与设定值间的动态偏差和静态偏差,两个偏差越小越好;快速性是指过渡过程的持续时间,过渡时间越短,控制过程进行的越快,系统品质也就越好。衡量系统的控制效果,往往不能单纯追求某个指标,而应根据系统实际情况,对超调量和调节时间等做通盘考虑。
由图2可知,临界比例度法得到的PID参数控制超调量为0.46%,调节时间3048s,而基于遗传算法的第一组PID参数控制超调量为1.64%,调节时间为520.8s。第二组PID参数控制超调量为0.64%,调节时间为2460s。综合考虑,基于遗传算法得到的第二组PID参数的超调量和调节时间均处于中间水平,控制效果的均衡性更好,系统的PID控制品质较佳。

图2 西南泵站出站压力控制回路阶跃响应曲线
3 结语
PID控制参数整定是控制系统设计的核心内容,对输油管道自动化具有重要意义。本文在研究和建立被控对象动态特性数学模型中采用了系统辨识的方法,避免了复杂的机理建模。系统辨识得到拟合度最佳的被控对象传递函数,为下一步进行先进PID控制奠定了基础。基于遗传算法,并借助MATLAB强大的语句功能,对控制系统进行了优化设计。遗传算法进行PID参数优化,对长输管道施工和投产期间的参数整定具有积极意义,弥补了手动调整参数费时耗力的弊端,能在短时间内得到控制品质较佳的参数,对于减少施工期间的调试工期大有裨益。
猜你喜欢
湖南水利水电(2021年6期)2022-01-18 06:07:40
机电工程技术(2018年10期)2018-12-06 02:26:38
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
河南水利年鉴(2017年0期)2017-05-19 02:32:09
统计与决策(2017年2期)2017-03-20 15:25:24
河南水利年鉴(2016年0期)2016-08-03 05:01:40
智能系统学报(2015年4期)2015-12-27 09:38:39
河南水利年鉴(2015年0期)2015-08-16 04:25:49
