
山地果园运送装备在线监测系统设计
2020-12-07 06:12李震郭玉姗吕石磊温威刘岳颜少华
现代电子技术 2020年21期
李震 郭玉姗 吕石磊 温威 刘岳 颜少华
摘 要: 针对山地果园在我国分布的地域较广、相对分散,农机使用的种类繁多、使用效率和使用情况不能实时更新等状况,设计了一款轻巧、小型、便于安装的监测装置。该装置通过GSM网络实现数据传输,根据数据包提供的Text获取农机的序列号、累计使用次数、本次启动后的工作时长、运行速率、经纬度位置以及有无故障等情况,数据信息显示在PC端上位机。实验表明,该监测系统传输数据稳定可靠,数据发送丢包率为0%,电池电量耗损与农机运行速率变化呈负向关系。通过该监测系统,可获取农机的历史使用情况,为相关决策提供参考依据。
关键词: 监测系统; 农机监测; 双模定位; GSM无线通信; 数据传输; 系统测试
中图分类号: TN92?34; S24 文献标识码: A 文章编号: 1004?373X(2020)21?0001?05
Design of online monitoring system for transportation equipments of mountain orchard
LI Zhen1, 2, 3, 4, GUO Yushan4, L? Shilei1, 2, 3, 4, WEN Wei2, 5, LIU Yue4, YAN Shaohua4
(1. MOE Key Laboratory of Southern Agricultural Machinery and Equipment Key Technology, South China Agricultural University, Guangzhou 510642, China;
2. Machinery Research Office of National Citrus Industry Technology System, Guangzhou 510642, China;
3. Guangdong Engineering Technology Research Center of Agricultural Information Monitoring, Guangzhou 510642, China;
4. College of Electronic Engineering, South China Agricultural University, Guangzhou 510642, China;
5. Engineering Fundamental Teaching and Training Center, South China Agricultural University, Guangzhou 510642, China)
Abstract: In view of the facts that the geographical area is wide, geographical distribution is relatively scattered, the agricultural machinery of mountain orchards is various, and the application efficiency and situation of the agricultural machinery can not be updated in real time, a lightweight and small monitoring device which would be easy to install is designed. The data transmission of the device is realized through the GSM network. The serial number of the agricultural machinery, the cumulative use times, the operation time after it starts, the running speed, the latitude and longitude position, and the operation situation (with or without fault) are obtained according to the Text provided by the data packet. The data information is displayed on PC?side host computer. The experiment result shows that the transmission data of the monitoring system is stable and reliable, its packet loss rate in data transmission is 0%, and the battery power consumption is negatively correlated with the running speed change of agricultural machinery. The historical service condition of agricultural machinery can be obtained by the monitoring system, which can provide the reference basis for relevant decision?making.
Keywords: monitoring system; agricultural machinery monitoring; dual?mode positioning; GSM wireless communication; cation data transmission; system testing
0 引 言
随着我国农业机械化水平的提升,山地果园机械化监测管理的水平和范围也在不断优化[1],尤其是单轨运送装备越来越广泛地被应用。但是在应用过程中存在状态、位置不清晰等问题,需要用现代通信技术手段在线获取状态信息。前人很多研究局限于使用無线数传电台方式进行数据传输,这种方式投入大、传输距离有限且是单向传输,难以进行控制[2]。基于无线通信技术的监测系统中,ZigBee、GPRS、WiFi、蓝牙等无线传感网络作为通信介质被广泛运用,导致其日益拥挤[3]。使用其他频段实现无线通信迫在眉睫,稍低频段的GSM无线通信兼具远距离和低功耗的特性,逐渐引起大众关注[4]。GPS和卫星遥感为精准农业方向提供了一整套现代化农事操作技术和管理系统[5],但GPS产品在我国卫星导航终端市场占垄断地位,给国家安全和国民经济可持续发展带来巨大隐患[6],开发基于北斗/GPS的双模定位系统对农事安全有重大意义[7]。在山地果园机械监测管理中,人们的关注点总是偏向于机械作业效率、农田灌溉等。在关于农业机械使用情况的农情方面,封闭的管理系统、传统的调研方式得到的数据只单单依靠农户们的口述,不能保证每张问卷的真实有效性。因此山地果园管理信息化、实时化是未来实现农业机械网络化管理的必然需求。本文设计旨在将信息技术科学地应用到山地果园农用机械的使用情况中,为农机管理部门做决策、为企业销售产品等提供有效依据[8]。相较于需要经常出差走访、工作量繁重的传统调研方式,本设计优势明显,在信号差、无法使用网络的山区地带也能保证正常通信,对提高山地果园生产效率、降低果农劳动强度、促进果园可持续发展以及对于农机保有率的关注情况都有重要意义[9]。
1 系统架构及整体设计
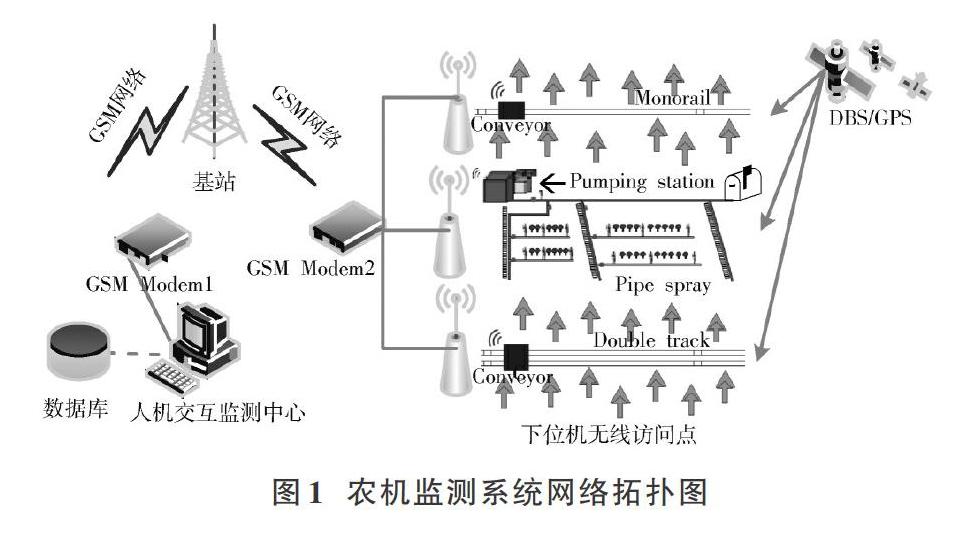
在线农机监测系统由两部分构成:一部分是由STM32控制器和GSM Modem1组成的下位机嵌入式信息采集终端;另一部分是由人机交互监测中心的PC机、GSM Modem2以及数据库组成的农用机械使用情况监测管理中心。下位机终端与上位机人机交互界面通过GSM网络通信,监测系统的网络拓扑图和整体框图分别如图1,图2所示。
现场监测点通过安装下位机系统装置,将数据通过GSM网络以SMS方式传输至PC端,GSM模块输出端选用SIM900A芯片,以此完成数据的接收、处理、显示和存储,用户可根据该农机的使用情况数据做一个农机状况评估表。
2 硬件选型及其程序设计
硬件电路主要包括STM32最小系统、SIM900A模块及外围电路、定位模块、电源模块、通信电路、旋转编码器以及单片机其他外围电路等。编写数据发送装置程序的开发环境采用MDK_Keil5,开发语言使用C语言,控制部分需用到AT命令,以短息文本的数据形式进行传输。
主控制器采用基于ARM Cortex?M3内核的STM32F103VET6芯片,该芯片能工作于-40~105 ℃的温度范围[5]。STM32F10是ST公司推出的STM32互联型系列控制器中一款功能强大、性价比高的产品。本系统中单片机各引脚对应连接关系及其含义如表1所示。
2.1 北斗/GPS双模接收机
北斗卫星导航系统是我国具有自主产权的卫星导航系统[10]。系统具有快速定位、简短通信和精密授时三大优势。使用该系统无需重建通信链路、无需租用卫星信道[11],不仅使用方便,而且可以取得非常明显的价格优势。
本系统中卫星信号接收机选用SkyTraq公司生产的S1216F8?BD模组为核心的BDS/GPS双模一体机G?Mouse,其集成了卫星接收机和天线,可同时接收BD2_B1和GPS_L1信号,具有结构紧凑、功耗低、定位精度高等优点[12]。系统启动后优先使用GPS定位系统,在国家之间发生冲突或者贸易战争爆发之际,可快速切换成北斗系统,以保证农机继续无隐患安全运作,G?Mouse应用电路如图3所示。
2.2 霍尔传感器测速电路
霍尔传感器是根据霍尔效应制作的一种磁场传感器,用磁铁靠近霍尔传感器时,霍尔传感器的引脚电平会发生变化。
霍尔传感器主要用在测速技术限位上,本系统采用测转速功能获取单轨运输机的速度,被测轴安装有12只磁钢,即转轴每旋转一周,产生12个脉冲。安装和工作示意图分别如图4和图5所示。
铁芯、磁钢、霍尔传感器的位置关系清晰明了,单片机的控制程序如下:
charcesu[5]="";
itoa (Frequency_value,cesu,10);
strcat (AG_machine_status,cesu);
strcat (AG_machine_status," ");
要求转速以转/分显示,因此要将测到的数据进行转换,转换的方法是将测得的数据乘以60,但由于转轴上安装有12只磁钢,每旋转一周可以得到12个脉冲,因此,要将测得的数据除以12,所以综合起来,将测得的数据乘以5即可得到每分钟的转速。
2.3 无线通信电路
本设计通过GSM网络实现远距离无线通信,STM32控制发送AT指令,GSM1按指令要求进行相应响应发送数据。SIM900A在SIM工作模式下频率为900 MHz,接口为标准RS 232,只需简单利用2个串行通信管脚和2个电源管脚即可实现与MCU的信息交互,选用SIM900A作为GSM模块的芯片对本系统的构建起了简化作用。解调模块的TXD,RXD引脚分别与单片机的PA02,PA03接口相连,TXD为发送端,RXD为接收端,组成串行异步通信接口,通信速度可设定,通常设定为9 600 b/s。
GSM模块通过异步通信接口实现对SMS的控制,共有三种接入协议:Block Mode、基于AT指令的Text Mode、基于AT指令的PDU Mode。发送SIM900A的命令字来发出短信时,在编程软件中设置三个数组,每个数组包含一条AT指令。
charcode mode[]="AT+CMGF=1\r";
charcode mode1[]="AT+CMGS=\"+8618344306607**\" \r";
char mode2=0x1a;
“AT+CMGF=1”代表选择Text模式,本系统的数据包是基于数字和字符组成的,为了保证系统的适用性,SMS的收发采用Text Mode。在该模式下,模块发送和接收的信息帧格式如图6所示。
数据帧由帧头、帧数据和校验子三部分组成。帧头表示数据帧的标记,由两个固定的字符“ss”构成,这两个字符可以通过模块直接发送;帧数据的字段长度为150 B,最多发送70个字符(采用Text模式,可发送汉字);检验子为数据字段所有字节累加和的补码,由一个字节组成。
2.4 程序设计
主程序是系统稳定工作的关键,功能包括:初始化CPU和网络(包括串口GSM协议栈的初始化和外设的初始化)、读取内部时钟信号、外部电源掉电检测、FLASH读取并保存参数设置等。系统主程序的工作流程如图7所示。
通电后,系统首先进行初始化,然后读取FLASH存储的参数,为下一次FLASH里需要保留的参数做准备(FLASH存储的是农机启动次数参数)。如果农机是第一次启动,则需要先把FLASH数据清零,如不是,则启动次数直接加1保存至FLASH,再保存数据。下一步测试GSM模块是否正常启动,若没有正常启动,2 s后模块会自动复位,单片机重新检测GSM模块能否正常启动,20 s后如果服务器端收到第一条数据包,说明监测系统正常启动,由此判断农机进入正常工作状态。中断后,延时启动,此后每隔10 min系统便发出一条数据,时间序列加1。当系统故障停止或断电停电前一瞬间会发送警告提醒信息。
2.5 数据包格式设计
本设计通过主控芯片控制发送短信指令,GSM1模块按指令要求进行相应响应,发送数据由模块GSM2接收后在PC端显示进行数据处理。当正常接收数据后依据手机通信号码判断是否为指定监测端发送的指令,以避免其他终端干扰操作。数据包操作采用特定Text格式,分成5段:A,B,C,D,E。A表示农机的特定编号即序列号,预留5位;B表示启动次数,预留3位,从000开始,农机每启动一次累积加1(重新烧录程序才会清零);C表示农机工作时长,预留2位,从00开始,每次启动农机后自动清零为00,随后间隔5 min(时间可调节,即农机工作时长)加1;D表示霍尔传感器的测速编号,单位是r/min,预留2位;E表示定位接收的经纬度定位信息(经纬度用于确认农机所处大概省市即可),预留30位,经纬度之间用“,”分隔。各段最终均转换为字符串格式存储,格式位于段之间用半角或全角字符空格隔开。
3 PC上位机界面设计与功能实现
在农机使用情况管理的监测系统中采用Windows操作系统,所以在软件设计时采用微软开发环境Microsoft Visual Studio,C#作为编程语言[8]。PC机与GSM2模块通过串口RS 232连接,以此实现上位机与监测系统的通信,人机交互主界面如图8所示,操作界面页主要用到串口调试功能和查询服务。串口调试功能界面主要包括串口传输、接收信息、索引信息以及存储数据等功能,调用GSM Modem提供短信猫API,完成数据的发送与接收等。SerialPort类的DataReceived事件为本文的主要使用技术,直接使用串口类SerialPort,通过实例化串口对象sp完成向设备发送AT指令及读取设备返回字符串,从而完成对“猫”的控制及数据传输。对于数据的分割和存储,若不连接数据库,“保存所有短信”可实现保存在Excel表格里。
在查询服务界面,可实现写入新农机信息,再存入相应数据库。C#.Net窗体与SQL建立连接的关键代码如下:
Sql Command cmd = null ;
Sql Connection con = new Sql Connection ( " 连接数据库字符串" ); //連接数据库
cmd. Text=″INSE RT INTO Basical1(手机号,农机序列号,农机名称,农机类型,地区)VALUES(′″+Mobiletxt.Text+″′,′″+ Serialnumtxt.Text+″′,′″+nametxt.Text+″′,′″+typetxt.Text+″′+ areatxt.Text+″′)″;
//在数据库中插入新农机信息,Basical1为表的名称
当用户想要查询自己使用的农机信息时,可以根据序列号,从数据库中导出SIM卡中的信息。
4 系统测试及实验结果分析
农机监测系统信息平台对数据内容具有识别功能,从而当有信息到达时,采取相应的动作,如数据归类、内容分离提取、删除无效或已读数据、保存数据内容等。
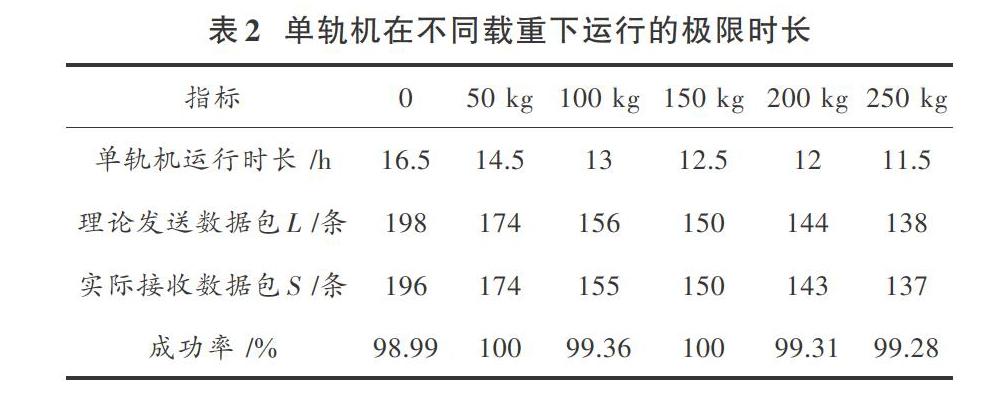
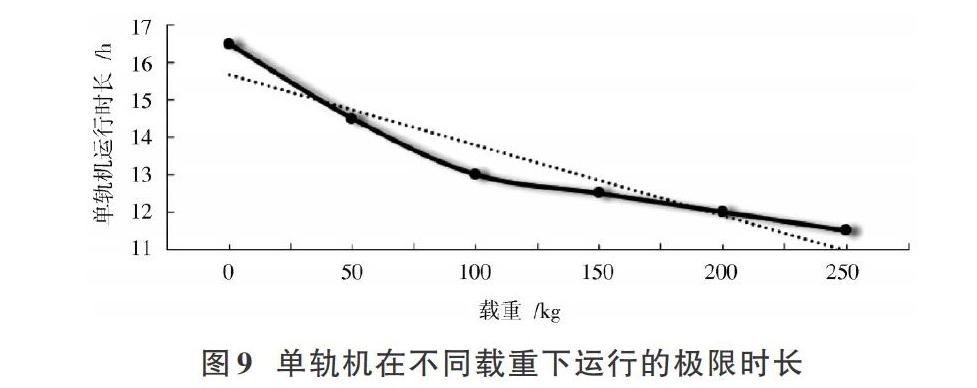
以单轨运输机为平台,检验系统的工作效果并验证有效性及可行性。在华南农业大学国家柑橘产业技术体系试验基地的单轨控制机上经过为期两周的实验(监测器启动后每5 min发送一条数据包),得到不同载重下单轨机运行时长如表2所示。再取三种不同载重,通过霍尔传感器传输的转速变化,以运输机电池电压为指标(用无纸记录仪记录电压,同监测器一致5 min取一个点,最后选出转速变化的点),得出不同载重情况下单轨机的运行时长以及运行速率随时间的变化,工作状况效果图如图9,图10所示。
由表2可得,运输机耗时与载重呈负关系,如图9所示。由图10可知,除空载、在有负载的两种情况下,单轨机的供电时长和速率变化规律比较一致,基本处于持平状态;在设备不断电、SIM卡不欠费的情况下,实际收到的数据包[S]与理论应收到的数据包[L]数量几乎一致,受上位机端串口传输的微弱影响,实验丢包率平均接近于[(L-S)L]=0.51%。
测试知,满电量电池电压达49.7 V,空电量约余41.5 V。将压降平均截成五段,如图10所示,电量80%以上时,速率基本无波动;电量余60%~80%时,速率随载重有轻微变化,重量每增10%,速率降2.38%;电量余40%~60%时,转速变化偶尔出现一次偏差,但不影响总体,载重增10%,速率相应降低1.39%;电量余20%~40%时,转速出现短暂持平状态;电量不足20%后,速率骤降,重量增10%,相应转速降约5.13%。速率减缓百分比[μ]随单轨机载重增加的百分比计算公式如下所示:
[Δv=(v1-v3)v1+(v2-v3)v22] (1)
[Δm=(m1-m3)m1+(m2-m3)m22] (2)
[μ=ΔvΔm] (3)
经实验,本系统可达到预期要求:服务器端按时收到终端发来的数据包,上位机读取后分割保存;重复多次重启终端也准时发送并收到数据;在系统上电后,读完一条数据保存后立即删除该数据包,以免系统故障时重复读取或SIM卡存满后无法接收新数据;系统运行出现问题时自动复位等。
5 结 语
本研究是基于GSM无线通信的农用机械使用情况的监测系统,采集的信息可通过GSM网络以短信的数据方式传至上位机,然后将数据包分割提取,通过在后台数据库查询,得到该工作农机机型、所处省市、有效工作时长等数据。至此,本系统实现的监测功能顺利测试完成,在减轻调研人员工作量的同时,也节约了调研人员的工作时间,解决了调研人员拿到问卷的不准确性、效率低下等问题。经过一段时间的实际应用表明,该系统轻巧小型、便于携带安装,收发数据及时、花销低廉,具有很好的实际应用价值。
参考文献
[1] 盛玲玲,宋淑然,洪添胜,等.广东省山地果园机械化现状与发展思考[J].农机化研究,2017,39(11):257?262.
[2] 张钊,李玮,辛小平.基于无线传感网络的草原气象自动监测系统设计[J].现代电子技术,2017,40(23):15?17.
[3] 商孔明.基于无线传感器网络和GPRS的温湿度远程监测系统[J].科学技术与工程,2012,12(24):6175?6178.
[4] 邓小蕾,李民赞,武佳,等.集成GPRS、GPS、ZigBee的土壤水分移动监测系统[J].农业工程学报,2012,28(9):130?135.
[5] 张波,罗锡文,兰玉彬,等.基于无线传感器网络的无人机农田信息监测系统[J].农业工程学报,2015,31(17):176?182.
[6] 刘红艳,张明伟,魏纯.基于ARM和STM32的树苗无线灌水智能控制系统设计[J].农机化研究,2017,39(1):132?136.
[7] 辛德奎,黄操军,邓婷婷,等.田间作业机车工况监测系统设计[J].农机化研究,2015(9):122?125.
[8] 丁素明,薛新宇,张玲,等.自走式果园风送喷雾机的研制[J].中国农机化学报,2016,37(4):54?58.
[9] 程晓英,陈焱,陆智明.南充市国家现代农业示范区柑桔生产成本分析[J].中国南方果树,2017,46(3):189?192.
[10] 金彪,杨少文,刘万科.GPS/BDS组合单点定位算法及结果分析[J].海洋测绘,2013,33(4):39?41.
[11] 张利,袁本银.GNSS多星座导航定位算法研究与实现[J].测绘学报,2012,35(5):195?197.
[12] 吕琳烨,邹鲲,叶勇,等.免疫分析仪数据库的设计及其实现[J].计算机工程与设计,2017,38(7):1982?1987.
[13] 李洪科,黄麟舒,徐慨.通信专网ARM远程监控系统的研究与设计[J].计算机工程与应用,2010,46(10):54?56.
[14] 李昕.GPS/DBS及PL高精度RTK定位算法研究[J].测绘学报,2019,48(4):534.
[15] 徐富新,王洲,陈芳,等.手机短信在实验选课系统的应用[J].计算机技术与发展,2013(11):152?156.
[16] 李玮瑶,王建玺,王巍.基于ZigBee的蔬菜大棚环境监控系统设计[J].现代电子技术,2015,38(12):51?54.
[17] 毛迎丹.无人机航行数据库中经纬度数据查询模型研究[J].微电子学与计算机,2014(5):144?146.
[18] 罗伟.采摘机器人视觉图像检测应用研究:基于篮球动作捕捉的多媒体数据库系统[J].农机化研究,2018,40(11):203?207.
[19] 赵波,向程,张焕国.一种抵御中间人攻击的可信网络连接协议[J].计算机学报,2019,42(5):1137?1148.
[20] 刘东.基于多子群萤火虫算法的数据库查询优化[J].计算机工程与应用,2014(11):110?114.
[21] 张春平,郁大照,王超.基于C#的實验室综合管理系统的设计与开发[J].实验技术与管理,2014(8):136?138.
作者简介:李 震(1981—),男,吉林人,博士,教授,研究方向为机电一体化技术应用、农情信息获取与应用技术研究。
郭玉姗(1993—),女,湖北人,硕士生在读,研究方向为农业信息化。
吕石磊(1984—),男,博士,研究方向为智能计算、算法优化应用。
猜你喜欢
现代电子技术(2016年24期)2017-01-19
中国新技术新产品(2016年23期)2016-12-26
科技创新导报(2016年21期)2016-12-17
软件工程(2016年8期)2016-10-25
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年11期)2016-06-17
科技视界(2016年11期)2016-05-23
