
利用车载激光点云的分车带识别及单木分割方法
2020-12-04 07:10张振鑫刘绍堂赵光兴
激光与红外 2020年11期
王 果,王 成,张振鑫,刘绍堂,赵光兴
(1.河南工程学院土木工程学院,河南 郑州 451191;2.中国科学院遥感与数字地球研究所,北京 100094; 3.首都师范大学资源环境与旅游学院,北京 100048)
1 引 言
城市道路分车带是在车行道之间划分车辆运行路线的分割带,具有提高交通效率和安全率、改变道路空间尺度、组织交通以及分割车流和行人的作用[1]。树木作为分车带的一种典型地物,在美化城市环境[2]、减弱噪声[3]、降低汽车尾气污染[4]、减缓暴雨引起的城市地表径流[5]、缓解城市夏季热量聚集[6]等方面发挥巨大作用,如何快速、准确获取其三维信息,对城市管理及规划具有重要意义。
车载激光扫描系统具有高精度、非接触、高密度、自动化、全天候、作业周期短等优点,能快速获取被测物体表面的空间三维信息和回波强度[7],已被广泛应用于城市三维建模、安全控制、车辆导航、道路建库、林业管理和自动驾驶等领域,同时在城市单木测量及信息更新方面存在重要的应用价值[8]。国内外学者在单木点云处理方面已做了大量研究,文献[9]提出通过分层网格点密度的单株树提取方法,文献[10]将高分辨率全景图像的RGB信息映射到点云上,在分类基础上,基于高程数据对激光点进行分层,使用每一层的网格点密度将树木与其他物体初步分离,最终估计树高和树冠面积;文献[11]根据行道树点云和周围地面点进行树高计算,利用不同方位距离比进行冠幅计算,并通过点云分层使用RANSAC算子拟合圆进行胸径计算;文献[12]提出多层次单木点云分割方法,在八叉树结构的基础上,依据叶节点同激光点云的关系对原始点云进行单木分割;文献[13]通过树木生长模型的加权分割方法,实现邻接行道树的分割。然而,对城市分车带及其内部树木场景,相关研究较少,此外,由于车载点云的杂乱无序性、场景对象大小和形状的不规则性以及城市场景的复杂性,点云的识别和分割应用存在巨大的困难,仍具有重要的研究价值[14]。本文以城市道路分车带及内部树木为研究对象,利用车载激光点云数据,研究分车带点云识别和单木分割方法。
2 分车带识别及单木分割方法
本文所采用的方法包括布料模拟点云滤波、基于八叉树的点云连通性聚类、最小包围矩形构建及分车带点云提取和局部最高点的区域生长算法单木分割,整个流程如图1所示。
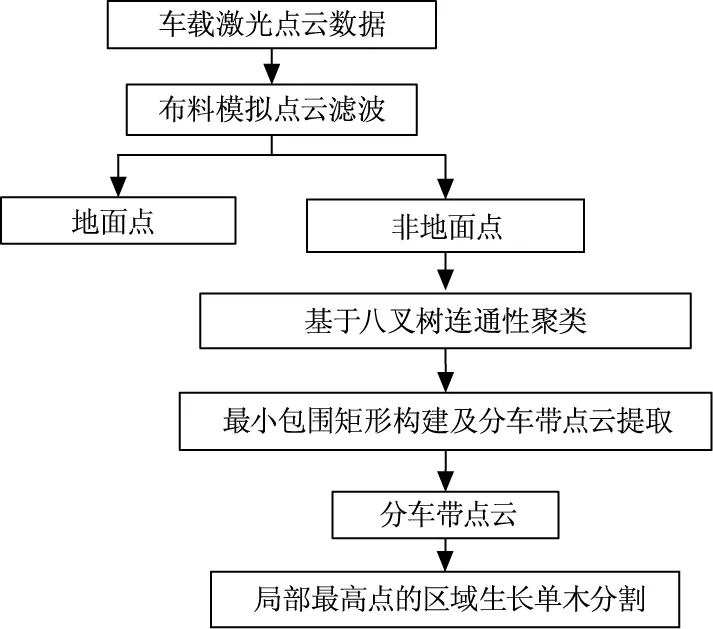
图1 分车带提取及单木分割流程
2.1 布料模拟车载点云滤波
文献[15]提出的LiDAR点云滤波算法布料模拟算法原理创新且参数少简单易用,被国内外多款知名软件采用,本文采用布料模拟算法进行点云滤波处理,其基本思想为:将获取的LiDAR点云数据的高程进行反转,布料由于重力作用会从反转的点云表面下降,通过分析布料与对应的LiDAR点云之间的作用,确定由于重力下降后所停留的位置,从而确定布料最后的形状,实现点云滤波,其原理如图2所示。
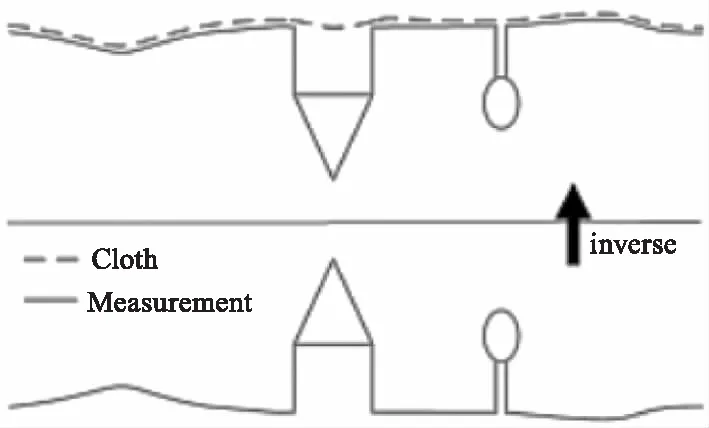
图2 布模拟算法示意图
2.2 基于八叉树叶节点的连通性聚类
对于滤波得到的非地面点,进行八叉树空间划分,如图3所示,首先构建数据的空间立方体包围盒作为根节点,然后将根节点立方体分裂为等体积的8个子立方体作为其子节点,之后不断对子节点继续进行递归分裂,直到达到设置的八叉树级别以及子节点包含的最少点个数。
从任一包含点云数据的八叉树子节点开始,搜索其周围的子节点,如果周围的子节点立方体包含有点云数据,则认为当前子节点内的点云和其周围子节点内的点云属于同一类别,不断搜索直到所有的子节点搜索完毕,则所有具有空间连通性的八叉树子节点所包含的点云会被聚类到不同的聚类单元,作为进一步提取分车带点云的基础。
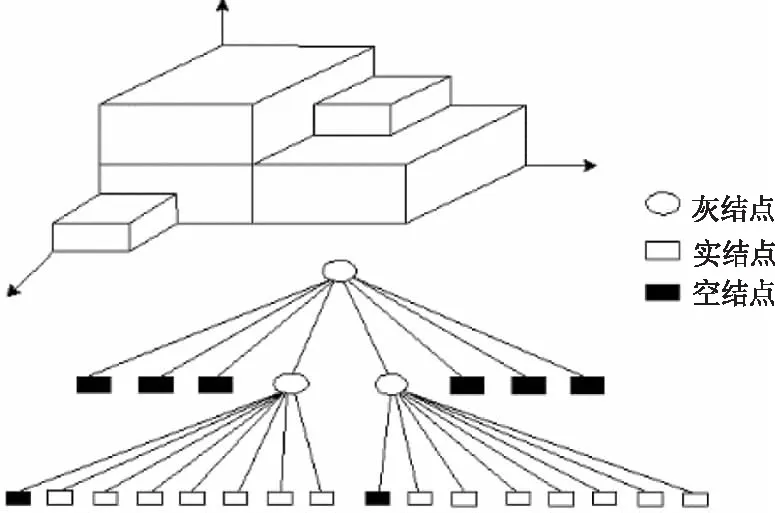
图3 点云空间的八叉树划分示意图
2.3 最小包围矩形构建及分车带点云提取
利用八叉树连通性分析得到的各聚类单元内部所包含点云的平面坐标分别建立各最小包围矩形(minimum bounding rectangle),然后通过分车带的先验信息进行分车带点云提取,具体判定规则为:对于每一个聚类单元,如果其最小包围矩形的宽度与分车带的先验宽度之差小于设定的阈值即公式(1)成立,同时聚类单元内的最高点与最低点高差在设定的阈值范围内,即满足公式(2),则认为该聚类单元内的点为分车带点云。
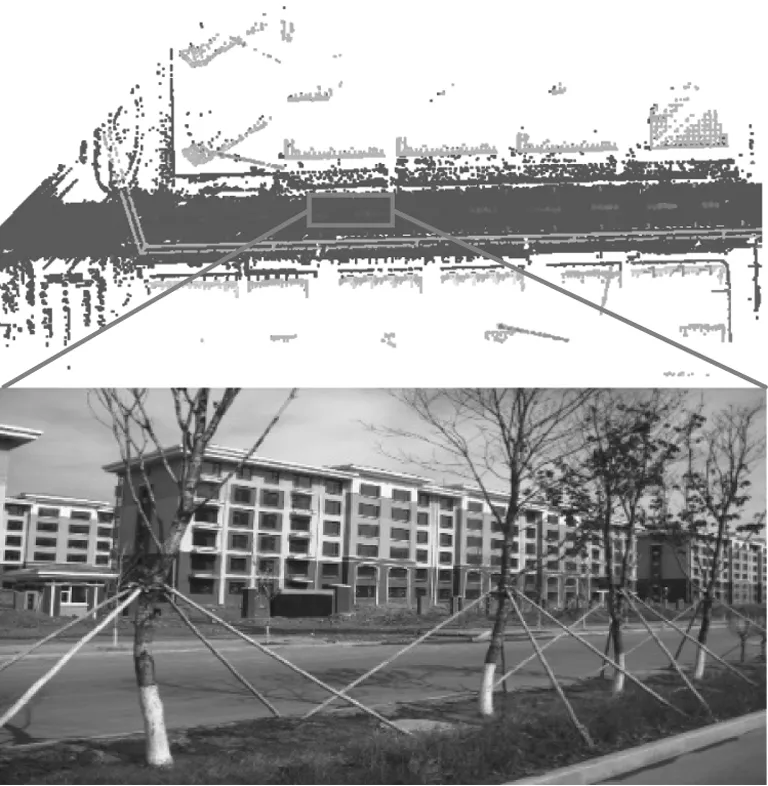
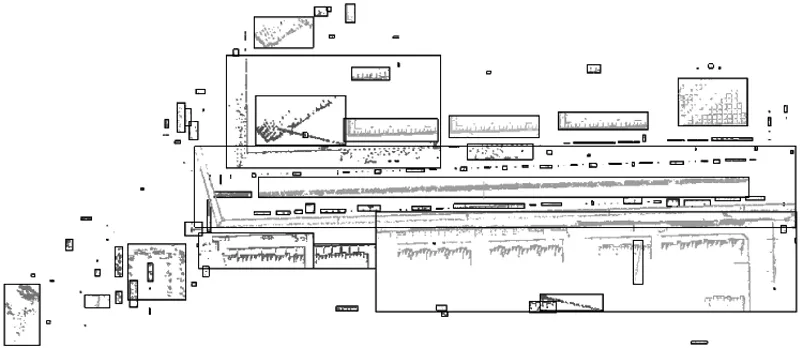
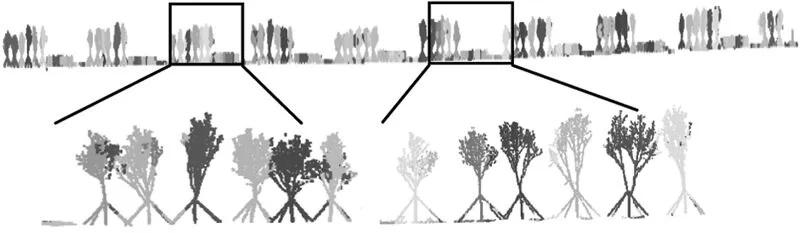
|MBRW-WP| (1) 其中,MBRW为每个聚类单元内部点云的平面坐标信息所建立最小包围矩形的宽度;WP为分车带宽度的先验值。 Hmax-Hmin (2) 式中,Hmax、Hmin分别为聚类单元中所有点的高程最大值和最小值;TW为宽度之差的阈值;TH为高度之差的阈值。 通过分车带内点云的单木空间几何特征进行分析可知,尽管树木可能在茂密的林分中重叠交叉部分,但树与树之间存在水平间距,并且树的顶部间距大于底部的间距,引入基于局部最高点的区域生长算法实现分车带内点云单木分割,设置单木的最大半径,从分车带内部点云开始按顺序对单棵树进行分割,其基本原理如下: 如图4所示,假定A点为树1的顶点,B点为树2的顶点,则dAB为两棵树在树顶的间距,E点和F点为两棵树的重叠点。 图4 树木之间的间距示意图 对于C点,判断dAC和dBC的大小,如果AC之间的距离小于BC之间的距离,则B点被分割为树1,同时将C点从待分割点中移除。同理,D点被分割到树2,同时从待分割点中移除,当距离单株树最大半径内的所有待分割的点完成分割,将A点和B点移除待分割点。 具体算法描述如下: (1)在所有待分割的分车带点中,寻找高程最高的点,作为第一棵树的顶点; (2)同时在该点设定的单株树最大半径之外,寻找距第一棵树顶点最近的最高点,作为第二棵树的顶点; (3)对于相邻的两棵树,分别在设定的最大半径内进行区域生长分割,同时将分割完成的点从待分割点云中移除; (4)重复以上步骤,直到所有的点完成分割。 为了验证方法的可行性,选取北京市某道路的车载激光点云数据进行实验,该数据采用Trimble MX2车载LiDAR设备采集,实验区域地势平坦,包含道路、建筑物、分车带、路灯、输电线等,实验数据长度为708.907 m,宽度为425.251 m,最高点和最低点之间的高差为61.179 m,共包含8,383,034个激光点,为了直观显示实验区的分车带及树木情况,随机选取实验区域的一部分,展示相应的车载影像,如图5所示,其中,方框区域为所示的车载影像对应的分车带点云区域。 对原始的激光点云数据设置布料分辨率为2 m,最大迭代次数为500,滤波阈值为0.5 m,建立358×216个网格,经布料模拟滤波得到6,532,182个地面点,1,850,852个非地面点,滤波后得到的非地面点云数据如图6所示。 图5 实验区域车载点云数据及方框区域的车载影像 图6 CSF滤波后的非地面点数据 依据2.2节基于八叉树叶节点的连通性聚类,设置八叉树的级别为8,子节点最小点数为10,共得到192个聚类结果,如图7所示,构建各聚类结果的最小包围矩形,将分车带宽度的先验值WP设置为3 m,阈值TW设置为3 m,高度之差的阈值TH设置为2米,得到提取的分车带区域点如图8中方框区域所示。 图7 基于八叉树的连通性聚类结果 图8 八叉树聚类及分车带点云提取 进一步将分车带点云利用局部最高点区域生长算法进行单木分割,单株树最大半径设置为2 m,经过单木分割后的结果如图9所示,为了清晰显示处理效果,选取实验数据中部分进行放大显示,如图9中方框区域所示。 图9 分车带内单木分割结果 对于LiDAR点云的提取和分析,由于缺乏公开统一准则的测试数据集以及支持分割提取算法的对比平台,研究人员为解决问题,通常需要获取特定场所的三维点云数据进行实验验证,实验结果没有统一的评定和衡量准则,算法缺乏可对比性,目前通常采用目视方式进行效果的评定[16]。从图9结果可以看出,所采用方法能够从车载激光点云数据中自动分割出分车带及分车带内单木点云数据,取得良好的效果。需要指出的是,由于实验区域分车带内单棵树之间存在交叉重叠且分车带内树木大小和形态不一,仍存在部分错误分割现象。 为了利用车载激光点云数据进行城市区域分车带提取和分车带内树木点云单木分割,本文针对实测的城区车载激光点云数据,综合采用布料模拟算法进行滤波、八叉树连通性聚类、分车带点云识别及分车带内单株树木分割,得到与现实情况基本一致的单木点云信息,为城市树木测量及三维重建提供数据支持。提出的方法充分利用原始三维点云的空间几何信息,与现有文献报道的基于体素和切片内插方法性比,避免了数据内插造成的原始数据精度和信息的损失,分割结果可靠性高。 由于真实世界城区分车带及内部树木之间情况复杂,利用车载激光点云数据的城区分车带点云提取及单木分割方法仍需要进一步研究,随着三维获取数据手段多源化的不断发展,综合利用车载激光点云数据和其他多源数据进行分车带点云提取及单木分割是进一步研究的重点。2.4 局部最高点的区域生长算法

3 实验及结果
3.1 实验数据
3.2 实验过程及结果分析


4 结 语
猜你喜欢
农业工程学报(2022年14期)2022-10-19实验室研究与探索(2022年4期)2022-08-06汽车实用技术(2022年10期)2022-06-09铁道通信信号(2020年8期)2020-02-06汽车维修与保养(2019年3期)2019-06-19森林工程(2018年5期)2018-05-14中南林业科技大学学报(2017年12期)2017-12-19中国公共安全(2017年11期)2017-02-06火控雷达技术(2016年3期)2016-02-06海军航空大学学报(2015年1期)2015-11-11
