
面向信息物理融合的建筑信息模型扩展方法
2020-12-04 07:46杨启亮马智亮邢建春袁生贵
同济大学学报(自然科学版) 2020年10期
杨启亮,马智亮,邢建春,袁生贵
(1. 陆军工程大学国防工程学院,江苏南京210007;2. 清华大学土木水利学院,北京100084;3. 陆军研究院,江苏无锡214035)
建筑信息模型(building information modeling,BIM)[1]是当前土木建筑领域最为重要的技术进展之一。建筑设施及其生命周期过程不断增长的复杂性,要求虚拟化的BIM能够实时、真实地叠加物理建筑实体与过程的动态信息,以实现快速、精确、安全、高效的建筑全生命周期管理和决策,即需要实时向虚拟BIM 实体反馈其所对应建筑物理实体的变化,实现建筑的虚拟信息实体与物理实体的融合交联、交互。但当前BIM 主要侧重于对建筑几何数据、空间位置、关系模型、质量属性等静态信息的定义与刻画,是一种“聋哑模型”,导致在开发BIM运维监控等信息物理融合系统时存在程序复杂,程序开发效率低的问题。如何对现有BIM进行扩展使其能够打破现有建筑虚拟BIM 实体与物理实体的信息边界、进而支撑BIM 虚拟实体与物理实体动态耦合交互的BIM新模型是迫切需要解决的难题。当前有若干工作已关注BIM扩展研究,一部分工作开展了BIM面向设计、施工等的扩展模型[2-3]研究,还有部分工作重点研究了BIM 与建筑环境数据交互技术等[4-5]。但总体而言,现有工作依然缺少对支持信息物理融合能力的BIM 通用化模型及其支撑技术的系统性研究。
本文旨在借鉴信息物理融合系统(cyber physical systems,CPS)[6]的思想,探索BIM 固有的静态模型与来自建筑物理世界动态信息进行叠加融合的一般性方法与支撑机制,研究建立有机融合静态、动态信息的面向信息物理融合的BIM 新基础模型,为高效构造基于BIM的建筑运维动态管控、增强现实人机交互等新型技术系统提供统一的技术支撑。
1 背景知识与相关工作
1.1 BIM扩展相关研究工作
1. 1. 1 BIM扩展研究现状
BIM 技术已渗透至建筑工程规划、设计、施工、运维等全生命周期,尤其是在设计[2,7]、施工阶段[3,8]研究应用得更为深入和成熟[9]。如,国内学者张建平等[3]研制了基于BIM的施工管理扩展模型。Zhai等[8]研发基于BIM和IoT(internet of things,物联网)的模块化集成施工平台。BIM 还在建筑能源[10]、安全分析[11-12]、设施运维[13-14]等方面取得较好的研究进展。
由 于IAI( industry alliance for interoperability,国际协作联盟)发布的基于IFC(industry foundation class)的BIM 基本模型[15]中包含对象实体的有限性,国内外学者根据自身需要研究了BIM 的对象集扩展问题。如Oti等[16]对BIM实体进行扩展以实现建筑可持续性(sustainability)分析。国内陈立春等[17]以电气实体为例,提出IFC 领域层实体扩展方法。
相关学者在BIM 扩展方面开展了有益的探索,但总体而言,现有研究工作多将BIM 视为与外部物理世界隔离的、封闭的、纯粹的虚拟模型,主要考虑如何构造能够在虚拟信息世界中高效运行的BIM实体模型,对面向CPS的BIM方面还缺乏研究。而现有BIM 及其支撑技术体系,缺乏对具有与外部物理世界交互协同能力的BIM 及其软件设施的支持,即BIM仍然是“聋哑模型”。
1. 1. 2 BIM与物理环境数据交换研究现状
近年来,随着BIM 技术在建筑工程运维动态管控、增强现实[18]等领域的应用,研究人员开始考虑如何将外部物理环境和对象动态数据集成接入到BIM平台中的问题。例如,Chen等[19]综述了实现BIM与建筑过程信息同步的方法与技术,但并没有从根本上研究支持信息物理融合与交互的BIM 基础模型。Lee等[4-5]研究了BIM与建筑设施进行实时数据交互的方法与技术,但缺乏对统一的通用化交互模型的研究。另外,近年来也有少部分学者开始将CPS 的概念和思想引入到土木建筑工程领域[20],但这些工作只侧重于构建一种面向土木建筑工程的信息物理融合系统,而缺少对支持信息物理融合能力的BIM通用化模型及其支撑技术的系统性研究。
从现有研究工作不难看出,为了实现对工程动态过程的实时响应和获取良好的用户体验,关于BIM与外部物理环境交互这一问题已经开始得到研究人员的关注,现有研究工作也取得了一定的进展。但是,现有研究工作仍大多只是针对某一个具体问题(如对RFID(radio frequency identification)对象扩展[20]等),通用性不强;且大多只能实现信息单向传递,依然缺乏能够解决BIM 虚拟实体与物理实体双向实时交互、动画展示等问题的通用化BIM 实体与模型及其支持技术。
1.2 CPS的概念及结构特征
信息物理融合系统(CPS)一般是指嵌入式计算机和网络监视和控制物理过程,并采用反馈机制实现物理过程和计算进程的相互作用[6]。其核心技术特征或要素主要体现在4个方面:传感(感知)器、控制器、执行器、反馈闭环。传感器、控制器和执行器是CPS的核心组成单元,反馈闭环是CPS运行交互的基本方式,是实现信息物理融合的基础手段。CPS的核心技术要素构成特征如图1所示。为了实现某一问题领域的信息与物理的融合、构建信息物理融合系统,通过合理设计与问题领域密切相关的感知器、控制器和执行器等要素实体,进而形成反馈闭环,是一种行之有效的技术手段。

图1 基于反馈闭环的CPS技术要素构成Fig. 1 Abstract of elements in CPS based on feedback loop
2 面向信息物理融合的BIM扩展总体框架
2.1 基本实现思路
BIM在本质上是基于面向对象思想对建筑物理世界的一种相对严格的信息描述,即BIM 空间中的虚拟实体是建筑空间中物理实体的对偶映射。但现阶段的BIM 框架所支持的这种映射,只是一种建筑实体静态属性(如尺寸、安装位置、形状等)的映射,缺乏对建筑实体参数和行为(如旋转、平移等)动态变化的映射支持,使得BIM 空间中的虚拟实体难以真实、实时地反映建筑空间物理实体动态变化。因此,实现建筑实体对象信息物理融合的目的在于确保BIM空间虚拟实体和建筑空间物理实体参数和行为动态变化的一致性,使BIM 空间能真实反映建筑物理空间的运动状态。为了实现这种建筑实体在虚拟空间和物理空间的状态一致性,本文借鉴CPS 的技术思想来开展研究。建筑实体信息物理融合的基本实现思路如图2 所示。基于CPS 的思想,在BIM空间中定义了4种虚拟对象,即感知器对象、控制器对象、执行器对象和动画对象。这里以空调机组为例来说明其采用这4 种对象的信息物理融合实现过程。
为保证BIM空间中空调机组与建筑物理空间中真实空调机组的状态一致性,首先要在BIM 空间中添加感知器对象,用来感知和获取物理空调机组的运行状态数据,该感知器对象与空调机组对象链接或绑定(如图2 虚线所示),用于描述这个感知器对象采集的实时数据是属于空调机组而非其他对象。通过感知器对象,完成了从物理世界到信息世界的信息传递过程,使得原本静态的BIM虚拟实体(如空调机组对象)变成了具有实时感知能力的虚拟实体,为实现BIM虚拟实体与建筑物理实体状态一致性奠定了数据基础。
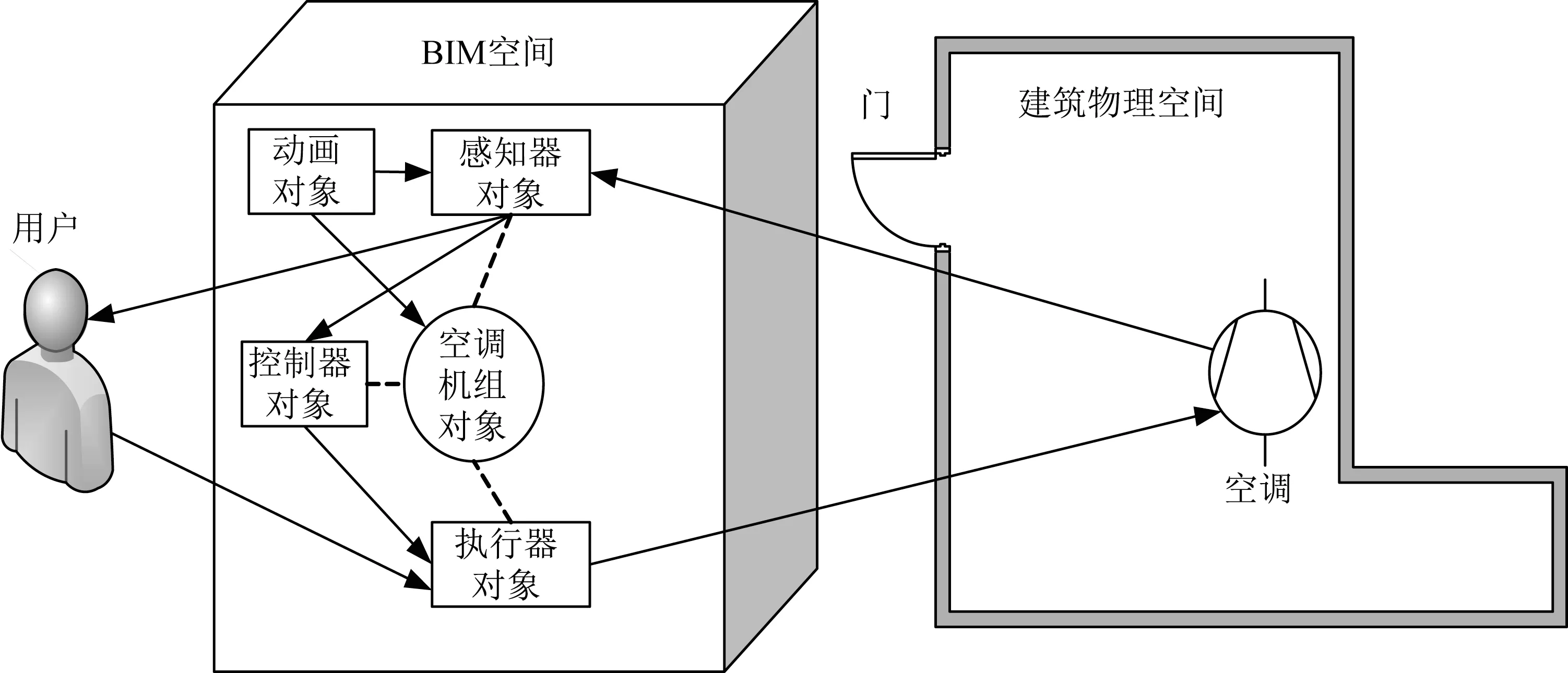
图2 建筑实体信息物理融合的基本实现思路图示Fig. 2 Idea of implementing cyber physical entities of buildings
其次,在BIM空间中添加执行器对象,用来执行(用户或控制器对象)施加到BIM虚拟实体上的控制动作(如启动、停止、参数设定等),进而驱动建筑物理实体运行状态的改变。该对象与常规BIM 实体(如空调机组对象)相绑定链接(如图2 虚线所示),用于标识该执行器对象服务于特定的BIM 对象(如空调机组对象)。通过引入和定义执行器对象,完成了信息(或控制指令)从BIM空间到建筑物理空间的传递,使得原本静态的BIM虚拟实体(如空调机组对象)演变成具有受控能力的虚拟实体,为实现建筑物理实体与BIM虚拟实体状态一致性提供了支持。
然后,在BIM空间中添加控制器对象,用来自动对基于感知器传来的信息进行决策推理,并将决策结果(控制指令)传递给执行器对象,由执行器对象驱动建筑物理实体改变其运动状态。控制器对象与常规BIM 实体(如空调机组对象)相绑定(如图2 虚线所示),用于标识该控制器对象服务于特定的BIM对象(如空调机组对象)。通过引入和定义控制器对象,使得BIM 虚拟实体具有自我控制能力,从而在BIM 空间与建筑物理空间之间形成了反馈控制闭环。另外,需要说明的是,BIM空间与建筑物理空间之间的反馈控制闭环的形成,不完全依靠引入控制器对象,也可以基于“人在环中(human in the loop)” 的思想构建,即可由用户充当控制器对象的角色,基于感知器的信息进行决策,而后通过执行器对建筑实体实施控制。
最后,在BIM 空间中添加动画对象,用来在BIM空间中动态展示与建筑物理世界中建筑实体的运行状态,实现虚拟实体与物理实体在运动状态上的一致性呈现。动画对象是对建筑实体运行状态的直观描述,由于建筑实体的运行状态存在多种形式,因此需要定义多种动画对象来描述建筑实体的运动状态。一般而言,建筑实体运动状态主要有旋转(机电设备)、填充(水池、液位)、移动、数据实时显示等类型,所以动画对象在具体实现时也可以按照这些类型进行分别定义。
上述4种对象对于构造基于BIM的建筑信息物理融合系统并非缺一不可,而是可以根据具体应用场景有选择地组合。例如,如果只需要在BIM 空间中动态监视建筑实体的运行状态,则只需要添加感知器对象和动画对象即可;如果在BIM 空间中既需要监视又需要由用户远程控制建筑实体,即需要使BIM虚拟实体同时具有感知能力和受控能力,则需要同时添加感知器对象、执行器对象和动画对象;如果需要使BIM 虚拟实体具有自我调控能力,则需要同时添加感知器对象、控制器对象、执行器对象和动画对象。
2.2 基于IFC的BIM实体扩展框架
BIM 技术的核心是信息描述、共享与转换,而IFC 标准则是实现BIM 信息描述、共享与转换的一种事实上的BIM 通用标准[15]。基于IFC 的BIM 框架目前只支持对建筑对象的静态属性描述,缺少支持信息物理能力的动态参数和行为的描述。本文在IFC 的标准框架下扩展前文所述的CPS 感知器、控制器、执行器等相关要素实体,从而使得BIM虚拟对象能够具有信息物理融合能力。
BIM 的 扩 展 一 般 有3 种 扩 展 方 式[21]:基 于IFCProxy实体的扩展,基于增加实体对象类型的扩展,基于属性集的扩展。本文采用重新定义增加新实体的方式在BIM的领域层进行信息物理融合对象扩展。
2. 2. 1 总体框架
在现有基于IFC 的BIM 框架内,新建与定义信息物理融合感知器对象IfcCPSSensor、信息物理融合控制器对象IfcCPSController、信息物理融合执行器对象IfcCPSActuator、信息物理融合动画对象IfcCPSAnimation 这4 个对象。这些对象之间的交互协作关系如图3所示。

图3 基于IFC扩展的信息物理融合对象交互关系Fig. 3 Interactive relationships between cyber physical objects based on IFC
信息物理融合感知器对象IfcCPSSensor用于实时感知信息,其通过建筑物联网驱动程序接口与物理传感器相连接,实时获取建筑空间中建筑物理实体的运行信息。其通过IFC内部绑定机制与常规建筑BIM对象(例如门(IfcDoor)等)相连接,使常规建筑BIM虚拟对象具有获取其所对应的建筑物理实体动态信息的能力。
信息物理融合控制器对象IfcCPSController 用于封装控制策略,其通过IFC 内部绑定机制分别与信息物理融合感知器对象IfcCPSSensor和信息物理融合执行器对象IfcCPSActuator 相连接,基于信息物理融合感知器对象IfcCPSSensor 感知的信息,实现自主推理决策功能,并将决策结果传输至信息物理融合执行器对象IfcCPSActuator。信息物理融合控制器对象IfcCPSController 通过IFC 内部绑定机制与常规建筑BIM对象相连接,使常规建筑BIM对象及其所对应的建筑物理实体具有基于动态信息的自主决策和自适应能力。
信息物理融合执行器对象IfcCPSActuator 用于实现控制信息的输出,其通过IFC 内部绑定机制与信息物理融合控制器对象IfcCPSController 相连接,接收信息物理融合控制器对象IfcCPSController 的决策推理结果;其通过建筑物联网驱动程序接口与物理执行器相连接,将该控制器决策结果通过建筑物联网驱动程序接口发送至物理执行器,进而实现调控现实世界中的建筑物理实体。IfcCPSActuator通过IFC 内部绑定机制与常规建筑BIM 对象相连接,使常规建筑BIM对象具有自我调控能力。
信息物理融合动画对象IfcCPSAnimation,用于实现常规建筑BIM对象在虚拟空间中的动画显示(如旋转、移动、填充、数据实时显示等)能力。其通过IFC内部绑定机制与感知器对象IfcCPSSensor相连接,获取真实建筑物理实体的动态信息,并与常规建筑BIM对象相连接,驱动常规建筑BIM对象在虚拟空间中依据建筑物理实体真实运行状态进行动画显示。
2. 2. 2 与常规BIM对象绑定的实现机制
本文定义的4种信息物理融合对象需要与常规BIM对象进行链接绑定。这种绑定机制采用IFC框架中的物理关系连接实体IfcRelConnectsElements来实现。基于IfcRelConnectsElements 的CPS 对象与常规BIM对象的绑定原理如图4所示。

图4 基于IfcRelConnectsElements实体的绑定机制Fig. 4 Binding mechanism of IfcRelConnects Elements entity
通过这种绑定机制,可以实现前文定义的4 种CPS对象与常规BIM对象的绑定,如图5所示。
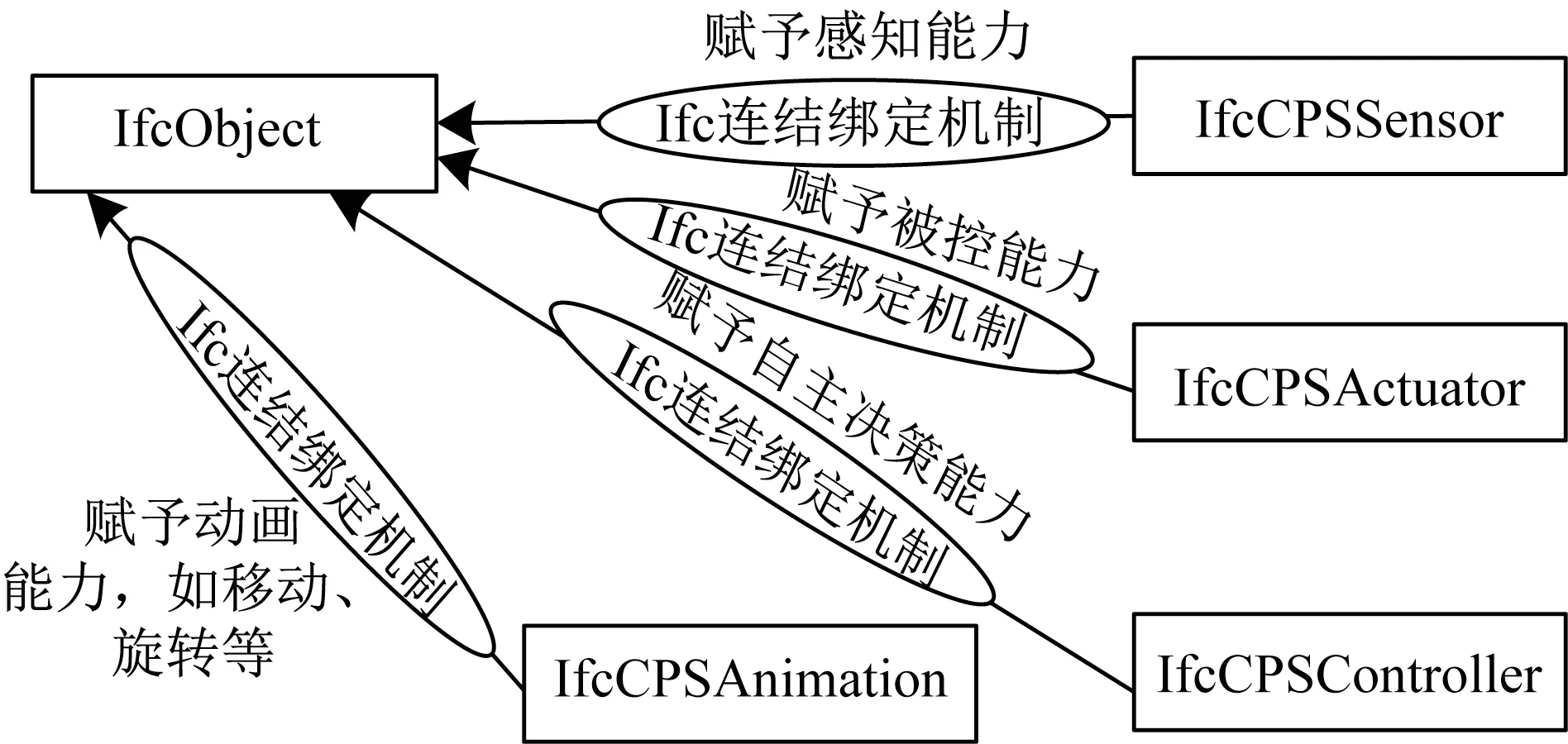
图5 CPS 4种对象与BIM常规对象实体的绑定示意图Fig. 5 Binding of four CPS objects and common BIM objects
2. 2. 3 BIM 信息物理融合扩展实体在IFC 框架中的位置
文中扩展的4 种信息物理融合实体可以IFC 主体 框 架 中 的 分 布 式 控 制 元 素 对 象IfcDistributionControlElement为基础进行构建,即这4 种对象均继承了IfcDistributionControlElement 的属性。新扩展的4 种信息物理融合对象实体在IFC框架中的位置如图6所示。
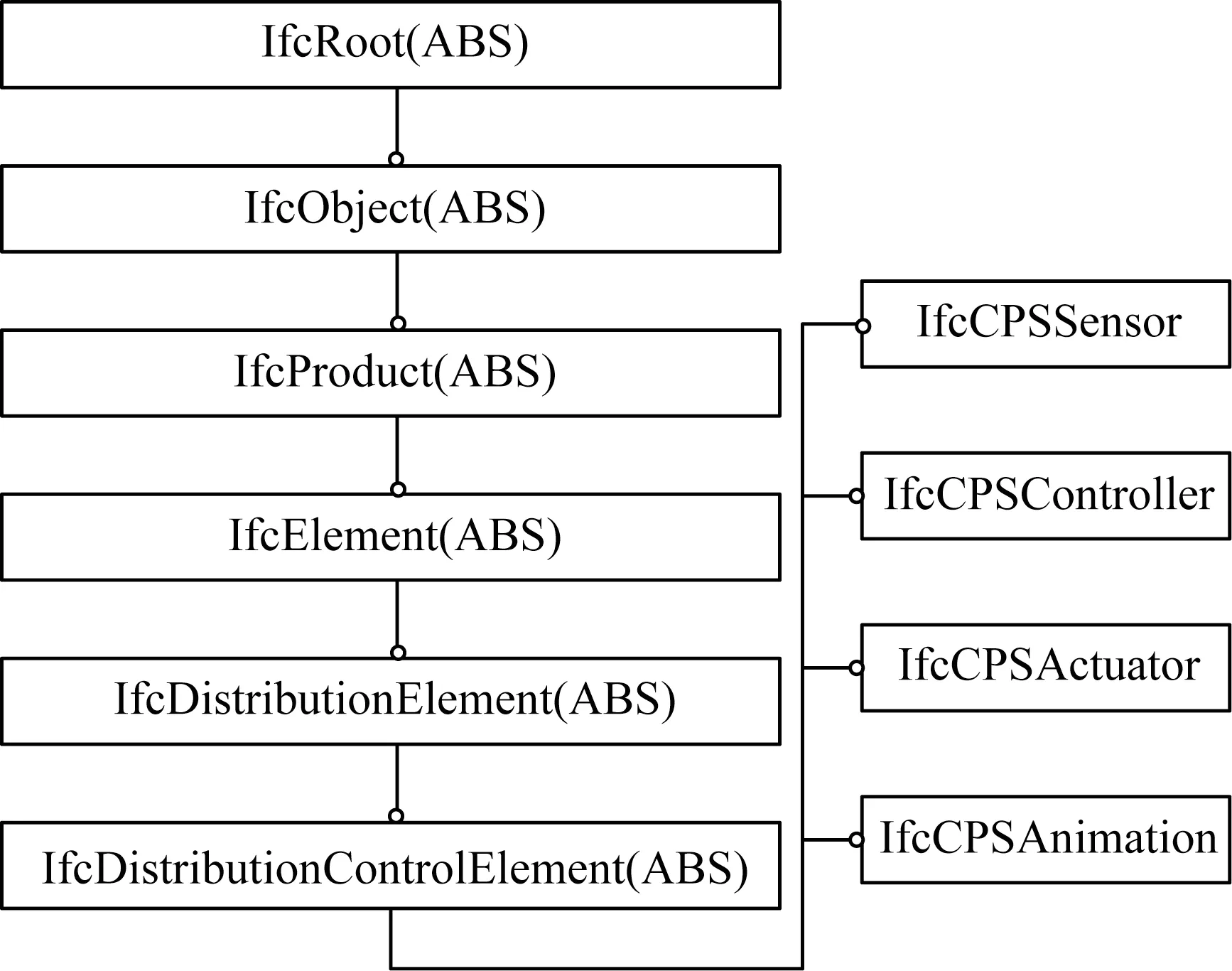
图6 4种信息物理融合对象在IFC主体框架中的继承位置Fig. 6 Inheritance position of four CPS objects in IFC main framework
2.3 基于UML 的BIM 信息物理融合实体协作关系模型
为了实现BIM 对象的信息物理融合能力,本文在BIM 空间中添加了4 种信息物理融合实体,而BIM 对象信息物理融合能力的实现,是通过这些对象与常规BIM对象之间的交互协作来完成的。为了更清晰地刻画这种交互,依据BIM 融合了面向对象思想这一事实,采用在面向对象软件分析与设计领域常用的UML(unified modeling language,统一建模语言)建模工具来对BIM 信息物理融合对象的交互关系进行建模。
2. 3. 1 基于UML 的BIM 信息物理融合对象协作关系类图
类图是面向对象系统建模中最常见的图,其显示了一组类、接口、协作以及它们之间的关系。类图一般用于描述对象系统的静态连接关系。图7 为BIM 信息物理融合对象、常规BIM 对象(如门窗)、以及物理空间中的建筑实体等之间的交互类图。从图中可以看出,信息物理感知器类IfcCPSSensor、控制器类IfcCPSController、信息物理融合执行器类IfcCPSActuator 构成了一个反馈闭环,这个环与常规BIM对象相连接,构成了特定的绑定关系。

图7 BIM信息物理融合对象UML类图及对应物理对象Fig. 7 UMLClass diagram of BIM CPS objects and corresponding physical objects
另外,动画类IfcCPSAnimation 有4 个子类:移动动画类IfcCPSMovingAnimation、填充动画类Ifc-CPSFillingAnimation、旋转动画类IfcCPSRotating-Animation、数据显示动画类IfcCPSShowingData-Animation。感知器类IfcCPSSensor 有2 个子类:模拟量感知器类IfcCPSAnalogSensor、开关量感知器类IfcCPSSwitchSensor。执行器类IfcCPSActuator同样也包含了2 个子类:模拟量执行器类IfcCPSAnalogActuator、开关量执行器类IfcCPSSwitch-Actuator。
2. 3. 2 基于UML 的BIM 信息物理融合对象协作交互图
交互图又称顺序图,是面向对象系统建模中刻画对象之间动态行为的工具。顺序图按照时间顺序对控制流建模。图8刻画了为BIM信息物理融合对象之间的协作交互关系,清晰地给出了对象之间的交互控制流及其发生顺序。
如图8 所示,每次信息物理融合对象之间的协作首先由物理空间中的感知器实体发起,将物理对象数据传入到BIM 空间中的IfcCPSSensor,而后该对象顺序地将数据传入IfcCPSController 对象(供自动决策)和IfcCPSAnimation 对象(供动画显示),同时并发地(图中par parallel 表示),控制器决策结果传递给执行器对象IfcCPSActuator,进而该BIM 对象将数据输出到物理空间中的物理执行器实体,最后物理执行器驱动物理对象改变运行状态,从而完成了一个信息物理融合闭环的交互过程。
3 BIM信息物理融合实现机制
与IFC 标准定义BIM 实体的方法一致,这里主要采用Express 语言[22]来定义和描述信息物理融合BIM 实 体。 本 文 重 点 研 究 了IfcCPSSensor、IfcCPSController、IfcCPSActuator、IfcCPSAnimation这4类对象的BIM实体构建和描述,受篇幅所限,这里重点选取IfcCPSSensor 和IfcCPSAnimation 来讨论其实现和描述机制。
3.1 基于Express 的信息物理融合IFC 感知器对象描述
基于物理世界感知器的一般原理,来定义和描述BIM 空间中的信息物理融合感知器对象IfcCPSSensor。正如物理世界的感知器一般分为模拟量感知器和开关量感知器两种,本文也将BIM 中的信息物理融合感知器分为两类:信息物理融合模拟量感知器和信息物理融合开关量感知器。
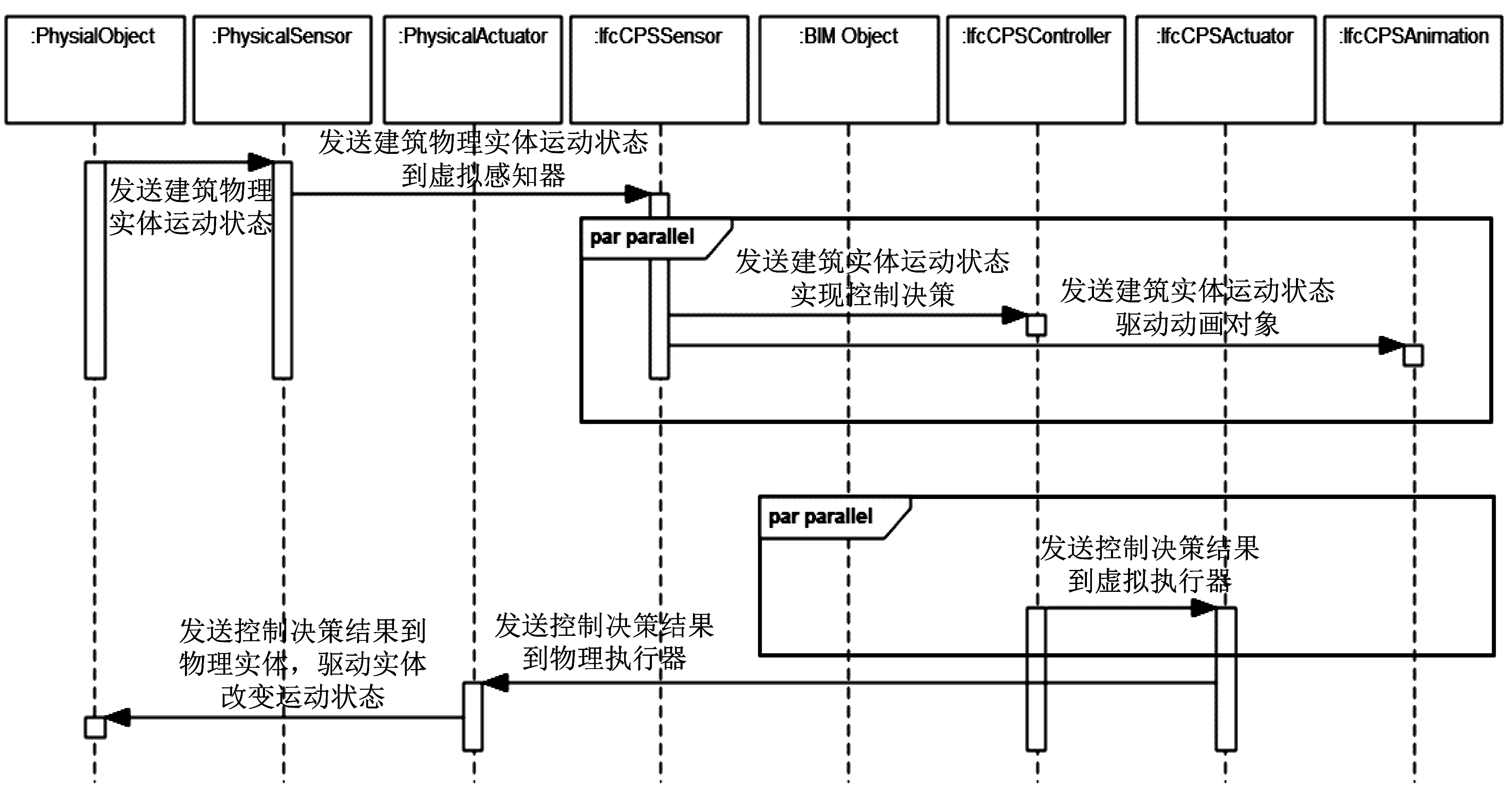
图8 信息物理融合BIM对象的UML协作交互图Fig. 8 UML collaboration diagram of BIM CPS objects
3. 1. 1 信息物理融合模拟量感知器
在基于IFC的BIM空间中,将信息物理融合模拟量感知器命名为IfcCPSAnalogSensor,实现对建筑物理实体的连续变化的模拟量值(如温度、湿度、照度等)进行感知和采集。 其基类为IfcDistribution-ControlElement,如图9 所示,在该基类的下级添加了新的实体IfcCPSAnalogSensor、IfcCPSSwitch-Sensor 及其对应的类型IfcCPSAnalogSensorType、IfcCPSSwitchSensorType。在定义这些实体时,可以事先提供预定义、用于特定场合(predefinedType)的感知器实体(如防护门开度感知器),采用IfcCPSAnalogSensorTypedNum 和 IfcCPSSwitch-SensorTypedNum 表达。即IfcCPSAnalogSensor 对象继承了IfcDistributionControl Element 类作为分布式元素的基本属性,获取GlobalID、Name 等标识属性以及Connected to 等连接属性。另外新定义了反映信息物理传感器特征的系列属性,基于Express的IfcCPSAnalogSensor实体具体定义如图10所示。主要属性包括实时工程测量值(RTEngineering-Value)、实时原始测量值(RTOriginalValue)、工程测量值报警上限(AlarmUpLimit)、工程测量值报警下限(AlarmLowLimit)、工 程 单 位(Engineering-Unit)等。
3. 1. 2 信息物理融合开关量感知器
开关量感知器对象IfcCPSSwitchSensor 是一种对开关量类型信息进行感知的BIM 抽象实体,实现对建筑物理实体的开关型状态值(门的开闭、设备运行的启停等)进行感知和采集。其继承于IFC 已有框架中的元素对象IfcDistributionControlElement,获取GlobalID、Name 等标识属性以及Connected to 等连接属性。采用Express 语言定义和描述的信息物理融合开关量感知器对象如图11所示,其新定义了反映信息物理开关量传感器特征的关键属性,其属性主要为实时开关量值(RTOnOffValue)。
3. 1. 3 信息物理融合感知器对象与其他对象的交互关系
在整个面向信息物理融合的BIM 扩展框架中,信息物理融合感知器实体对象需要与其他3种对象建立2种不同的关系。
第一种是基于数据接口交互的连接关系,即信息物理融合感知器对象要分别与信息物理融合控制器对象和动画对象连接,建立数据层面上的接口连接关系,为这两种对象提供感知来的数据。这种连接关系由于存在实际的数据传输,本文采用IfcConnectPorts对象建立此种关系。
第二种是依附关系,即信息物理融合感知器对象与被感知的常规BIM实体(如空调机组)建立一种组合,说明该感知器对象专属于这个常规BIM实体,可以理解为感知器对象是依附于常规BIM对象的一个组件,因此本文采用IfcRelConnectsElements 对象来构建此种关系。

图9 信息物理融合感知器在IFC框架中的位置Fig. 9 BIM CPS sensor in IFC main framework

图10 基于EXPRESS的IfcCPSAnalogSensor实体的定义Fig. 10 Definition of IfcCPSAnalogSensor based on EXPRESS
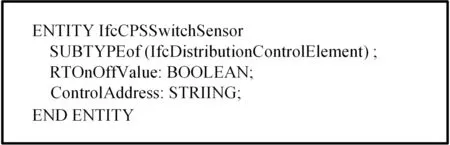
图11 基于EXPRESS的IfcCPSSwitchSensor实体的定义Fig. 11 Definition of IfcCPSSwitchSensor based on EXPRESS
3.2 基于Express的信息物理融合IFC动画对象描述
3. 2. 1 BIM信息物理融合动画对象的定义与描述
动画显示是为了在BIM空间中直观地表达建筑实体的运行状态,并使之与现实建筑物理空间中的相应实体运动保持一致。根据建筑物理实体的运行形式,本文主要将动画显示分为4种类型:旋转、填充、移动、数据显示。与前述定义的BIM 信息物理融合对象相同,动画对象的基类也为IfcDistribution-ControlElement。在该基类的下级添加了新的实体IfcCPSRotatingAnimation、IfcCPSMovingAnimation、IfcCPSFillingAnimation、IfcCPSShowingDataAnimation及其对应的类型IfcCPSRotatingAnimationType、IfcCPSMovingAnimationType、IfcCPSFillingAnimationType、IfcCPSShowingDataAnimationType。同样地,在定义这些实体时,可以事先提供预定义、用于特定场合(predefinedType)的动画实体(如防护门旋转动画),采用IfcCPSRotatingAnimationTypedNum、IfcCPSMovingAnimationTypedNum、IfcCPSFillingAnimation-TypedNum、IfcCPSShowingDataAnimationTypedNum表达。下面分别讨论这4种类型动画对象的定义与建模方法。
(1)旋转动画对象
旋转是一种实现建筑对象绕其中心点旋转的BIM抽象实体,简写为IfcCPSRotatingAnimation,其在BIM虚拟环境中根据其所连接的模拟量感知器对象数据源的值的变化,动态驱动该动画类所连接的建筑BIM对象绕其中心点进行旋转。
采用Express 语言定义和描述的信息物理融合旋转动画对象如图12 所示,其继承于IFC 已有框架中的元素对象IfcDistributionControlElement,获取GlobalID、Name 等标识属性以及Connected to 等连接属性。另外新定义了反映旋转动画对象特征的系列属性,其主要属性包括旋转中心点X维坐标(CenterPointX)、Y维坐标(CenterPointY)、Z维坐标(CenterPointZ)、旋转角度(RotatingAngle)、重复次数(RepeatCount)等。
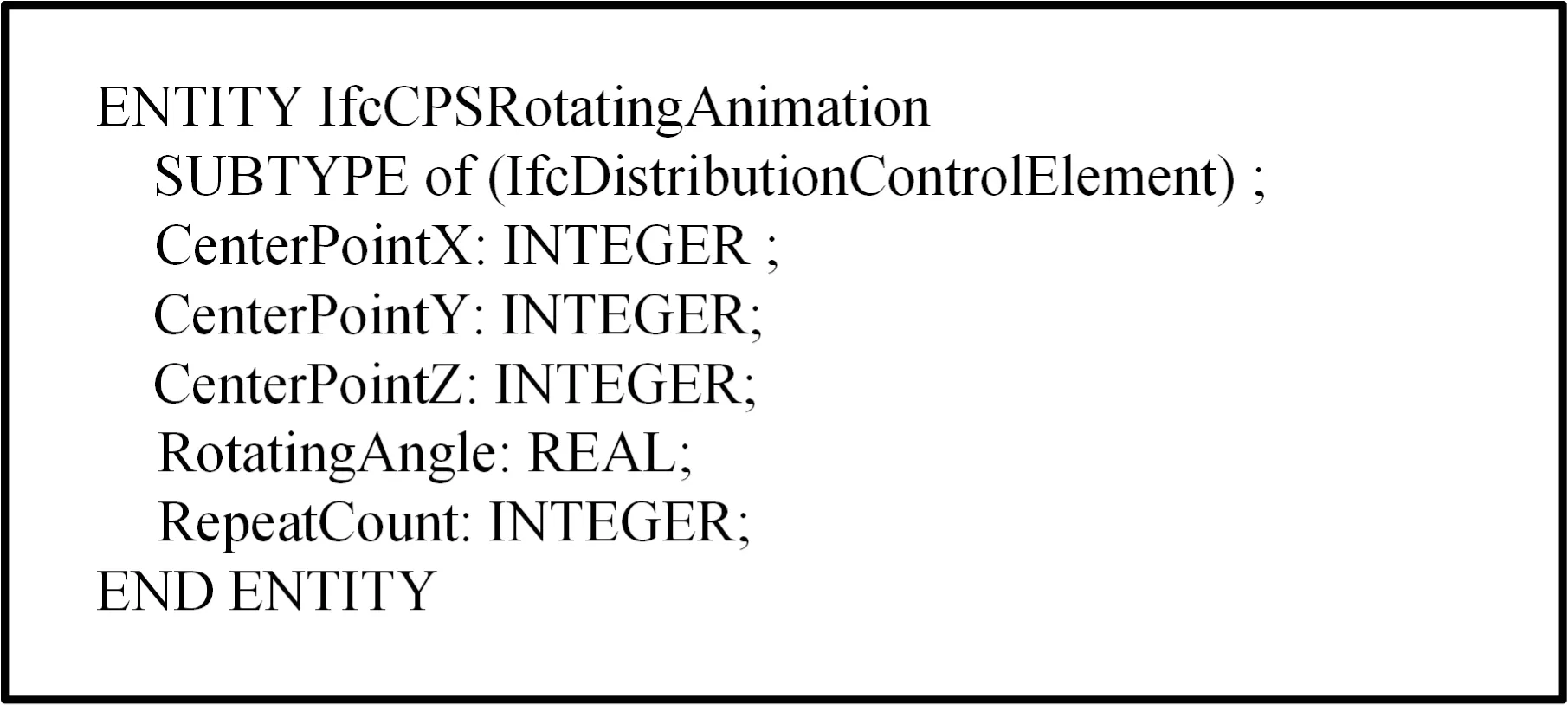
图12 基于EXPRESS语言的旋转动画对象描述Fig. 12 Description of rotating animation object based on EXPRESS
(2)移动动画对象
移动动画对象是一种实现建筑对象移动的BIM抽象实体,简写为IfcCPSMovingAnimation,其在BIM 虚拟环境中通过改变对建筑物理对象BIM 实体的空间坐标位置属性来实现建筑物理对象实体的移动。
采用Express 语言定义和描述的信息物理融合平移动画对象如图13 所示,其继承于IFC 已有框架中的元素对象IfcDistributionControlElement,获取GlobalID、Name 等标识属性以及Connected to 等连接属性,另外新定义了反映平移动画对象特征的系列属性,主要属性包括目标位置的X、Y、Z轴坐标(NewPlaceX、NewPlaceY、NewPlaceZ),初始位置的X、Y、Z轴 坐 标(OldPlaceX、 OldPlaceY、OldPlaceZ)等。
(3)填充动画对象

图13 基于EXPRESS语言的移动动画对象描述Fig. 13 Description of moving animation object based on EXPRESS
填充动画对象是一种实现建筑对象填充的BIM抽象实体,简写为IfcCPSFillingAnimation,其在BIM虚拟环境中根据其所连接的模拟量传感器对象数据源值的变化,动态填充该动画类所连接的建筑BIM对象中的图元区域,使图元区域能以填充区域的百分比来反映模拟量数据源值的变化。采用Express语言定义和描述的信息物理融合填充动画对象如图14所示,其继承于IFC已有框架中的元素对象IfcDistributionControl-Element,获 取GlobalID、Name 等 标 识属 性 以 及Connected to等连接属性。另外新定义了反映平移动画对象特征的系列属性,主要属性包括填充颜色(FillingColor)、填充方向(FillDirection)、填充最小百分比(FillingMinPerValue)、填 充 最 大 百 分 比(FillingMaxPerValue)、填充下限输入值(Filling-MinValue)、填充上限输入值(FillingMaxValue)等。
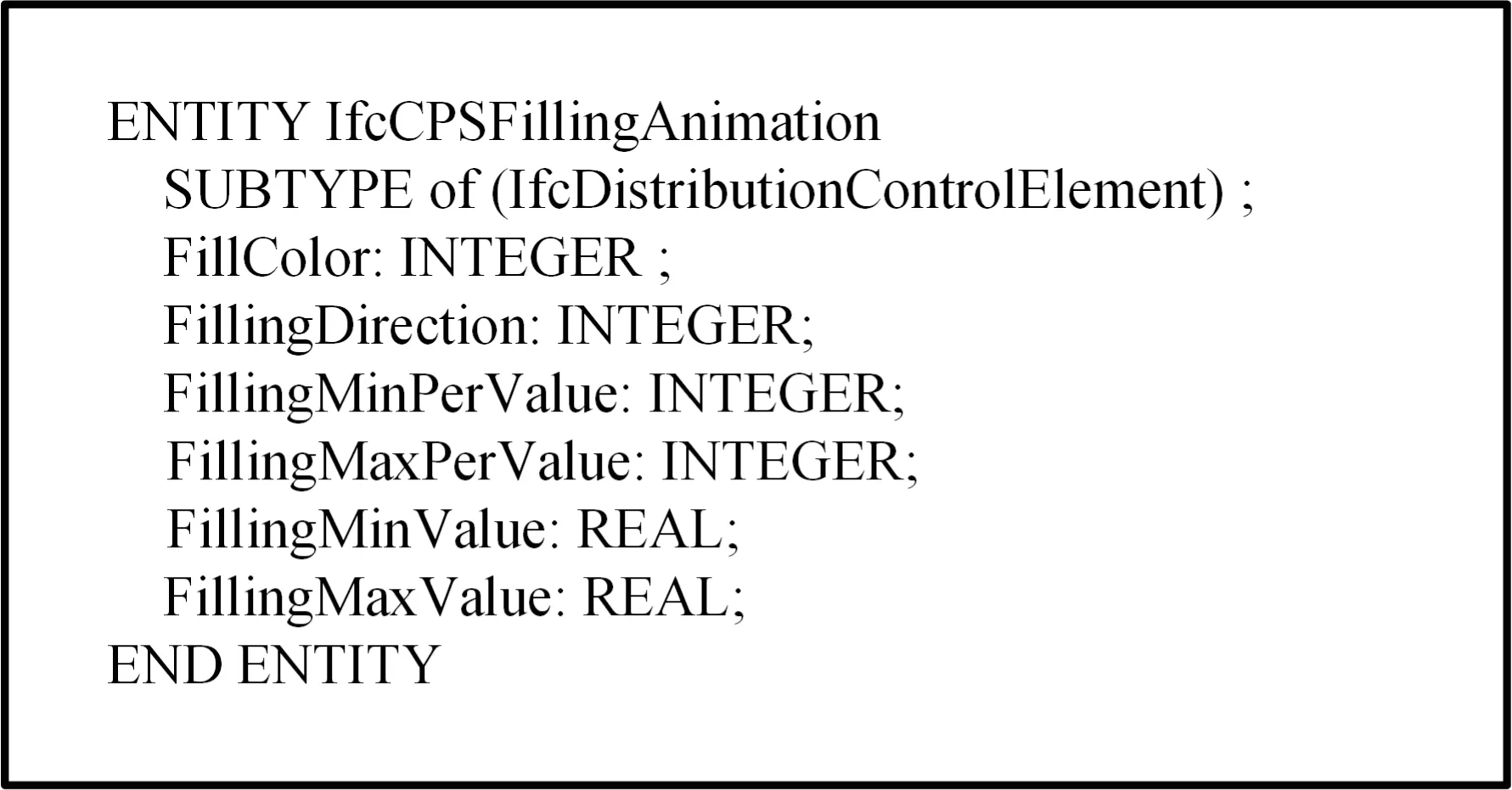
图14 基于EXPRESS语言的填充动画对象描述Fig. 14 Description of filling animation based on EXPRESS
(4)数据显示动画对象
实时数据显示动画对象是一种实现建筑对象相关的动态数据显示的BIM 抽象实体,简写为IfcCPSShowingDataAnimation,其在BIM 虚拟环境中动态显示其所连接的模拟量传感器对象数据源。其继承于IFC 已有框架中的元素对象Ifc-DistributionControlElement,获取GlobalID、Name 等标识属性以及Connected to等连接属性,另外新定义了反映数据显示动画对象特征的系列属性,主要属性包括数据实时值(RTVALUE)等。
3. 2. 2 信息物理融合动画对象与其他对象的交互关系
与信息物理融合执行器等对象类似,在整个面向信息物理融合的BIM 扩展框架中,动画实体对象需要与其他两种对象建立两种不同的关系。
第一种是基于数据接口交互的连接关系,即动画对象要与信息物理融合感知器对象建立数据层面上的接口连接关系,即接收感知器对象的数据输入。这种连接关系由于存在实际的数据传输,采用IfcConnectPorts对象建立此种关系。
第二种是依附关系,即动画对象与被调控的常规BIM 实体(如空调机组)建立一种组合,说明该动画对象是专属于这个常规BIM 实体的,可以理解动画对象是依附于常规BIM 对象的一个组件,因此本文采用IfcRelConnectsElements 对象来构建此种关系。
4 BIM信息物理融合模型的原型系统验证
近年来,由于具有富信息、三维可视等突出优势,BIM 技术开始在人防工程的运维监控中得到应用。采用BIM 技术,可以为用户提供贴近真实建筑空间场景的监控软件人机界面。但是由于传统BIM框架,不支持信息物理融合能力,使得BIM与建筑物理空间的对象实时数据无法紧密耦合,导致监控软件中BIM三维对象无法在同一软件界面动态显示对象运行状态和参数,即存在BIM 静态模型与其动态运行状态分离、用户体验和人机交互友好性不强等不足。本节利用前文建立的信息物理融合扩展模型和实现机制,来构造基于BIM 扩展模型的人防工程运维监控原型系统,其硬件结构如图15所示。原型系统设置1 台监控主机,运行基于BIM 扩展模型的工程运维监控软件,采用LonWorks现场总线控制网络与人防工程设备进行监控。原型系统设置1 台LM1204 开关量控制器和1 台LM1101 模拟量控制器。图16 为原型系统基于BIM 扩展模型的监控软件界面。该软件界面实现了对工程防护门系统进行实时立体监控功能。通过该软件界面可在BIM三维虚拟空间中实时监测相关设备的运行参数和运行状态,同时,通过双击防护门设备,可以实现对防护门的开闭控制。
通过原型系统的构建和实验,验证了本文研究所提出的BIM信息物理融合扩展模型和实现机制是可行、可用的。这种BIM信息物理融合扩展模型使得监控软件中的BIM空间中动态显示与物理世界一致的设备运行状态和参数,有效解决了现有基于BIM的建筑运维监控软件系统存在的BIM静态实体与动态数据分离、开发难度大、交互性不强等问题。
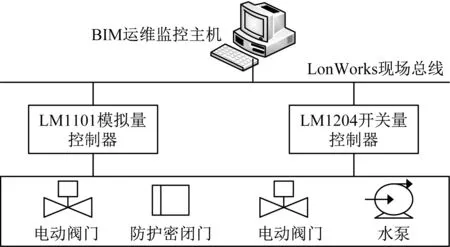
图15 基于BIM的人防工程运维原型系统结构Fig. 15 Structure of BIM based operation and maintenance system in civil air-defense construction

图16 原型系统基于BIM扩展模型的监控软件界面Fig. 16 Prototype system monitoring software interface based on BIM extension model
5 结论
本文针对建筑生命周期过程对信息物理融合交互的新需求,提出了一种面向信息物理融合的BIM扩展方法,并尝试将其应用到人防工程运维监控系统中,分别从面向信息物理融合BIM 扩展的总体框架、实体定义与实现机制、原型系统等方面开展了研究。本文研究成果是对IFC 框架的有益补充,使得支持信息物理融合能力的BIM 成为现实,为高效构造基于BIM 的建筑运维动态管控、增强现实人机交互等新型系统提供了较好的技术支撑。
但总体而言,本文的研究工作仍是初步的,笔者仍将在以下两个方面展开进一步的研究:①BIM 信息物理融合对象实体的进一步扩充完善,需要进一步结合具体工程应用进行优化,如扩展动画对象,使BIM 能支持更为复杂运作状态呈现能力。②基于BIM扩展模型的建筑运维监控平台的工程应用。在原型系统的基础上,进一步完善基于BIM 扩展模型的建筑运维监控平台的功能,提高其可靠性,加快其工程化应用进程。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
廉政瞭望·下半月(2021年5期)2021-07-20
中学生数理化·中考版(2020年10期)2020-11-27
中国外汇(2019年18期)2019-11-25
汽车维修技师(2019年2期)2019-08-23
当代陕西(2019年5期)2019-03-21
意林(2018年3期)2018-03-02
领导决策信息(2017年9期)2017-05-04
