
水面舰艇试验中航路设计及优化方法研究*
2020-12-02 11:44
舰船电子工程 2020年10期
(91404部队 秦皇岛 066000)
1 引言
航路设计指试验中的舰(机、艇)等的航行路径设计及与其相关因素的设计。在性能试验中航路设计是编制试验方案的关键环节,其涉及因素众多,体现着试验目的、试验方法等试验的核心思想,与试验结果的准确性、置信度密不可分[1~4]。航路设计贯穿于航海作业、船舶工程设计、水面舰艇试验等舰船相关研究及应用的各方面。马顺南、娄汉泉等人创造性的将网络图理论引入航路计中,建立了全系统校飞航路的网络图模型;王琦、赵永铁在雷达测量试验条件建设过程中,采用数字仿真分析的方式进行了目标航路的设计,进而分析了模型对测量精度误差的影响[5~7]。对航路设计的研究虽多,但没有人系统地考虑过航路设计及优化需综合考虑的因素及优化方法。优秀的航路设计方案对于节省资源、提高试验效率有较大的提升作用,因此对性能试验中的航路设计需考虑的因素及可能的设计优化方向进行研究很有必要。
2 航路设计需考虑的因素
针对水面舰艇试验的特点,提炼总结了四个方面的相关因素。
2.1 以使命任务为牵引,瞄准试验目的
航路设计应首先了解试验目的、试验条件,分析试验测量指标,以试验任务为牵引综合考虑航路设计的相关因素。只有详实、准确地了解试验要求才能设计出符合要求的试验航路。对装备的某些容易受电磁、气象环境影响的能力指标要重点考核其复杂环境条件下的性能;对形成战斗力影响重大且存在性能边界的指标,要摸清装备的性能底数。
2.2 从装备的性能出发
试验鉴定是围绕被试装备展开的,对航路的设计应从装备的性能出发。例如感知能力试验中,靶机或靶弹就位点和退出点的选择就应考虑试验舰雷达的威力范围、雷达探测的盲区等因素;攻防试验中需根据武器的射界、对目标辐射特性或红外特性的要求、对目标飞行高度的要求以及目标速度、机动性等影响综合设计试验。性能指标是试验设计的出发点,试验前应对被试装备的整体性能有清楚的了解。
2.3 录取有效数据
测试不同的试验指标采取的数据录取及处理方法、需要的数据量均不相同。例如测试雷达的作用范围及精度试验中,一般在被当做目标的靶标上架设高精度GPS设备录取位置数据并经过差分处理后作为目标位置的真值,同时本舰录取目标数据作为测量值。针对不同的指标,数据处理时可以取均方根、二阶原点距等。试验录取的数据点数与配试目标速度、传感器性能、传感器数据率等因素有关,试验所需的数据量取决于指标对相应置信度下的置信区间的要求。这两点综合决定着试验需要的航次、架次。置信度和置信区间为数理统计中的概念,置信度越高所需要支撑数据量越大,当然试验的成本也越高,但带来的收益呈下降趋势,这需要实际试验时进行分析确定。
2.4 环境的影响
环境的影响一般包括水文、气象、电磁环境等的影响,随着战争信息化、以及我国海军从近海防卫到远海防御战略的发展,复杂环境越来越重要的影响着现代战争。比如某些指标要求在五级海况以上进行测量、对海超视距试验需要在有良好大气波导的条件下进行、对信息的感知受云雨气象影响大等。试验过程中也要考虑环境因素带来的影响,比如电磁干扰导致数据量录取不够、气象条件恶劣带来的发现距离缩短等问题,在设计航路时应针对此类问题设计考虑应急预案,在数据不合格或数据量不够的情况下,可以采用增加一段距离或一个航次等手段来增加数据量。
3 航路优化分析
3.1 一体化综合考虑,采用结合实施的策略提高效率
试验过程大多时间紧、任务重,兵力协调困难,准备工作多、时间长。采取结合式综合试验策略,对相关试验项目进行模块化组合设计,一次兵力行动完成多个项目,缩短试验周期,减少资源消耗,提高试验效率。比如对空探测范围试验可以结合开展对空精度试验,航路设计时可以在最大探测范围处设置多次进入、离开,进行最大探测范围试验,之后航路设置为目标向站飞行进行精度测量试验。考虑到精度试验时数据率较高,可能一次向站飞行就可满足精度数据的采集需要,这样的结合实施提高了效率、节省了资源。
3.2 联系实际,考虑实施的可能性
航路设计应联系兵力、装备的实际性能、可操作性等因素来考虑航路的可实施性。比如对于一些过于复杂的航路对实际的操船来说难度太大,很难跑出理想的效果;在低能见度下光学的传感器性能大大降低等。对这种情况要提前考虑以免影响试验的实施。
3.3 通过仿真验证,优化航路设计
对于完成设计的航路进行模拟仿真,分析试验中各因素对试验航路的影响,验证航路的合理性、准确性,发现试验中可能出现的问题;对于不同的方案也可以通过仿真对比其优劣性;同时通过改变参数、试验条件等方式,可以发现航路的优化方向,提高其准确性、经济性。
4 某型传感器测向精度航路设计及优化分析
4.1 实例分析建模
某水面舰艇试验中,需要测量舰载某水下传感器的测向精度指标,该指标要求在舰艇匀速直航条件下进行测量。首先分析试验目的,需要对舰载传感器360方位均进行测向精度测量,试验条件为被试舰艇匀速直航。考虑装备的性能特点,该型传感器对水下探测时,在船艏、船艉各有±20的盲区,探测距离不大于3海里。舰船的速度选择为舰艇的巡航速度,初始位置选择靠近探测范围最大值的点,在这里设定为6km。对配试目标的选择方面,选择潜艇能获得最好的测量效果,但由于潜艇兵力协调困难,试验时协同困难。经分析用水面舰艇做配试目标并不会影响最终测向精度的准确性,所以配试目标选择一轻型护卫舰。综合考虑上述航路因素进行航路设计,设计本舰和配试舰相向航行进行如图1所示航路设计。本舰和目标舰初始位置如图1所示,夹角为20°,两船相向航行至对称的位置后各自转向,再相向而行至对应位置。往返一次为一个航次就可以完成对本舰传感器探测范围内全方位的测向精度测量。根据置信度及置信区间,计算精度所需的数据量,再依据一个航次获取的有效点数,得到试验需要进行的航次数为两个。

图1 航路设计图
4.2 航路优化及效果对比分析
4.2.1 航路优化建模
但根据以往经验表明,该型号传感器在不同方位的精度测量值呈现规律性变化,摸清其变化规律对未来舰船对传感器的应用方法参考意义重大。上述航路中由于两目标距离一直在变化,所以无法准确判断精度随方位的变化。为准确统计方位精度随方位变化的规律,就需要在试验舰和目标舰的距离不变条件下进行方位精度测量。
考虑在试验舰的匀速直线运动条件下,若保持两舰的距离不变,则该航路可以设计为围绕一个匀速直线运动的动圆心的圆周运动,圆周运动的半径不变。对于该类问题可以建立平面直角坐标系,并将运动分解到相应的两坐标上,最后通过两坐标的描述来确定其运动轨迹[8~9]。假设两舰运动于一个平面,建立平面直角坐标系,令被试舰位于原点以速度V沿X轴正向运动,经过时间t,其运动距离为V*t;配试舰初始位置位于被试舰正上方6km处,初始运动方向与被试舰相同,配试舰所做圆周运动的速度不变,半径不变,则其运动角速度也不变,设为w,在时间t内运动角度为θ=w*t,将运动分解到X、Y两方向,则分解到X方向的运动距离为R*sin(w*t),分解到 Y 方向的运动距离为[10~12]R*cos(w*t)(如图2所示),则最终两个方向的坐标值分别为

建模仿真航路运动轨迹如图3所示,在一个周期螺旋线内可以完成对水下传感器全方位的测向精度测量,两个周期可以完成对所需数据点的采集[12]。

图2 运动分解示意图
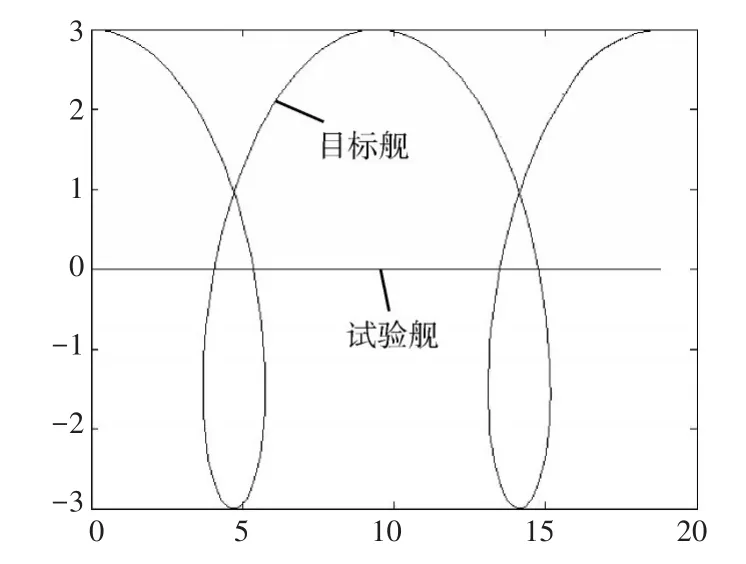
图3 运动航路轨迹图
4.2.2 优化效果对比分析
上述螺旋曲线是以3海里为半径进行精度测量。考虑到不同探测距离对精度的影响,还应设计其他半径距离下的精度测量航路。对比第一个航路明显航路更长,而且航路设计复杂,对操船要求也很高。但第二个航路能更准确地分析精度和方位的规律关系,若该规律关系明显,那这种规律对于以后该装备的使用具有巨大的指导意义,其费效比是巨大的。通过分析可以知道,方案的对比有时候是相对的,在没有绝对完美的方案时要综合考虑,确定最终的实施方案。
5 结语
文章聚焦于性能试验中水面舰艇的航路设计及优化研究。在分析影响因素基础上对构建的航路提出优化方向,最后结合实例进行了航路设计及优化并进行了优化对比分析。优化后的方案并不是在所有方面都是最优的,对于实际方案的选择还要结合试验目的,水面舰艇的使命任务综合考虑。实际试验中航路设计需考虑的因素更多、更复杂且很多因素随环境、各种试验条件不断变化,这也是我们下一步的研究方向。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
一重技术(2021年5期)2022-01-18
北京大学学报(自然科学版)(2021年3期)2021-07-16
电脑爱好者(2020年19期)2020-10-20
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
电子技术与软件工程(2020年7期)2020-02-05
弹道学报(2019年4期)2020-01-10
华人时刊(2016年16期)2016-04-05
科技与创新(2014年11期)2014-08-21
