
基于惯性传感技术的船舶吃水实时测量系统设计
2020-11-30 06:54杨兴聪王自浮
科学技术创新 2020年34期
魏 羽 杨兴聪 王自浮 陈 丹
(重庆交通大学 航运与船舶工程学院,重庆400074)
船舶吃水是一个重要参数,可以利用它来计算船舶的排水量,目前几乎完全依赖于人工目测的方法来确定船舶吃水。这种方法虽然简便但存在诸多弊端,比如:(1)肉眼观察的准确性和可靠性受到天气等客观条件的影响而显著地变化。(2)工作量大且无法长时间在水中测量。(3)水波的干扰。(4)无法多点同步观测。(5)个人经验的差异对测量结果有较显著的影响。这些不利因素制约了目测法测量精度的提高。[1]
目前对于吃水测量的研究还未达到完全的脱离人工,同类的研究也是需要人工去调节传感器姿态,以此来摆正雷达测距镜头的位置,这样费时费力,精确度得不到保证。为了改善传统船舶吃水检测方法的缺点,本文提出一种惯性传感技术的高精度船舶吃水检测方法,保证对船舶吃水的测量精度。
本文设计能够自动为船舶驾驶人员提供精确的船舶吃水,有利于降低船员在测量吃水时的安全风险。与现有的自动测量系统相比,本文采用惯性传感器测量测距传感器的姿态,并通过云台实时调整测距传感器姿态,使其始终于水面保持垂直,有利于提高船舶吃水测量的精确度。且采用无线自组织网络进行测量终端与上位机之间的数据传输,有利保证吃水测量的实时性。通过卡尔曼滤波方法对船舶吃水结果进行处理,有利于降低船舶吃水测量结果的误差。
1 整体系统设计
1.1 测量原理
基于惯性传感技术的高精度船舶吃水实时测量系统,主要包括雷达测距仪终端和上位机两个部分。雷达测距仪终端包括云台、惯性传感器、雷达测距传感器、单片机、无线信号模块和驱动装置;上位机主要是船舶上的驾驶台用于接收船舶实时的吃水数据。
并通过太阳能电池和可充电池进行供电,惯性传感器和雷达测距传感器均固定安装在云台上,同时惯性传感器和雷达测距传感器分别传输姿态数据和测距数据到单片机,单片机通过姿态数据反馈指令控制云台的镜头转向装置进行修正调平云台,雷达测距仪终端的数据通过无线信号模块与无线自组织网络上传给上位机,上位机用于接收雷达测距终端的数据并进行数据整合和处理得到吃水结果。
1.2 整体系统装置介绍
雷达测距装置:设有防水外罩,内置雷达测距传感器和无线信号发射模块。雷达测距传感器性能稳定可靠,利用电磁波探测目标。其主要测量原理是从雷达传感天线发射雷达脉冲,天线接收从水面反射回来的脉冲,并记录时间T,由于电磁波的传播速度C 是个常数,从而得出到水面的距离D。
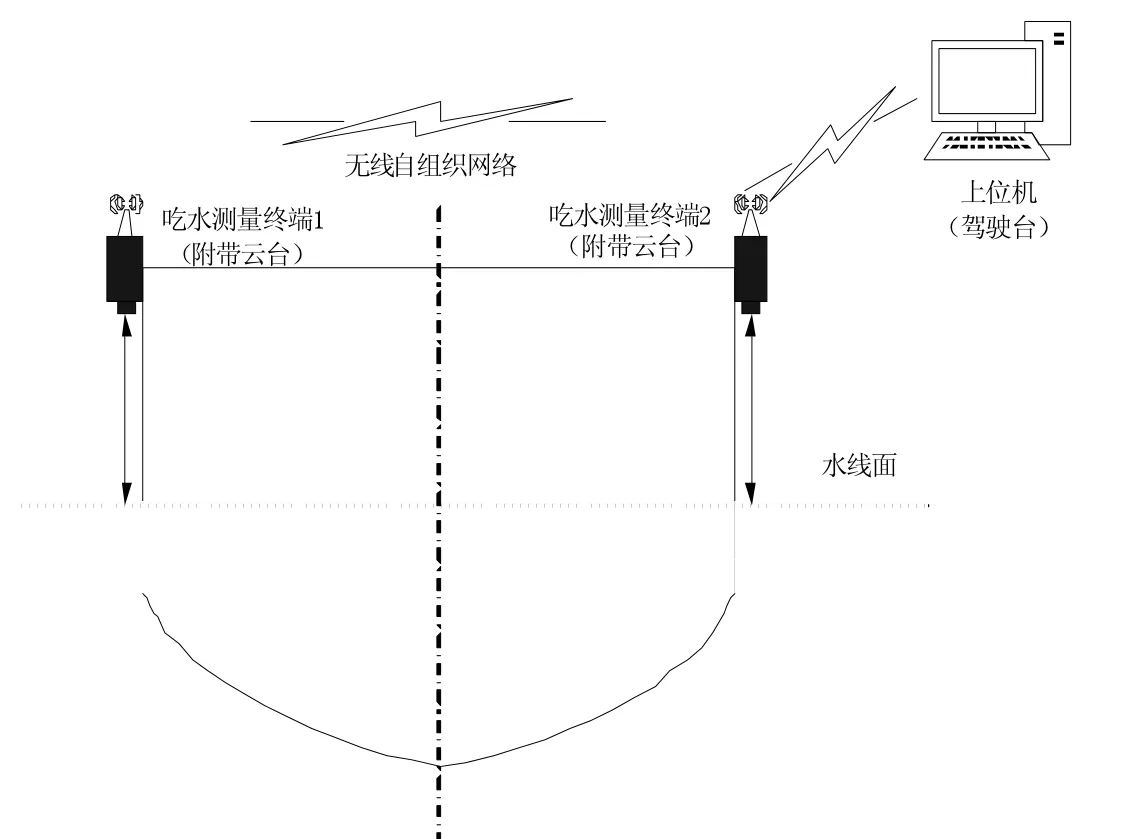
图1 基于惯性传感技术的高精度船舶实时测量系统的整体结构图
镜头转向装置:利用云台原理使镜头可以稳定,防止由于船的颠簸晃动产生误差。
控制装置:通过惯性传感器的测量,控制雷达测距传感器的转动,发射雷达脉冲等问题,使雷达测距传感器始终与水面垂直。
惯性传感装置:通过检测船舶的倾斜程度,来摆正雷达发射脉冲的位置。
数据处理:测距完成后,开始整合数据和数据处理,通过无线自组织网络将数据发送至船舶驾驶台。
驱动装置:主要由控制精确,反应速度快的电池进行驱动,电池可进行手动充电,或者太阳能供电。
1.3 理论计算
惯性传感器使用测量:
船体在航行过程中由于受到海浪的影响,船体会发生摇晃,所以陀螺仪的姿态会随之发生变化,在船舶原理中,航向角、横倾角,以及纵倾角是船舶中要的三个姿态,而陀螺仪只能测量三轴加速度,以及三轴角速度,无法直接得出船舶姿态,需要经过坐标旋转变换,以及积分关系得出相应的姿态,以此来调整雷达脉冲发射,使镜头可以始终平行于水面,减小误差。
下面对陀螺仪三个自由度分别进行了讨论和姿态计算公式。
(1)旋转Z 轴:
旋转前坐标(X0,Y0,Z0),旋转后坐标(X1,Y1,Z1)
计算矩阵:

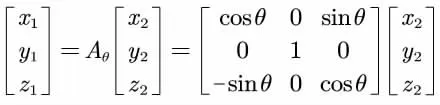
(2)旋转Y 轴:
旋转前坐标(X1,Y1,Z1),旋转后坐标(X2,Y2,Z2)
计算矩阵:
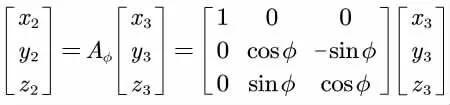
(3)旋转X 轴:
旋转前坐标(X2,Y2,Z2),旋转后坐标(X3,Y3,Z3)
计算矩阵:
1.4 雷达测距传感器(恩莱雷达液位计)
当调整好雷达测距传感器姿态后,雷达测距传感器从反射到接受的时间差t 与天线到物体之间的距离L 成比例,采用以下公式
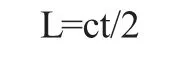
其中,c 表示电磁波的传输速度,为定值;t 为反射到接受的时间差;
设传感器的天线高程为 H0, 反射面的高度H=H0-L=H0-ct/2;
若雷达测距传感器的天线对着码头水面发射脉冲波,H 值就是需要测量的水位值;
误差计算
其中:
式中:Sg为统计值标准差;Xi为每次所观测的雷达水位(m);Xi为每次人工观测水位值的平均值(m)。
1.5 误差分析
船舶停靠在港口肯定会经受波浪而运动,其运动周期可能为几秒到十几秒不等。为消除波浪的影响,要求船舶吃水测量系统每次测量必须有相当数量的采集子样(一般采集时间不少于2min)。根据显示的所有测点数据的周期性变化曲线,选取相应的同步时间段数据(波浪周期的整数倍)进行平均计算,以此来消除波浪的影响。利用船舶吃水测量系统可以多次采集足够数量的子样进行同步测量,对各个测点的测量结果进行整合处理。由上述方法得到各测点的船舶吃水数据,通过软件可以绘制船体吃水沿船长的分布曲线。结合船舶型线值,就能较精确地得到该状态下的船舶排水量。若已精确测量了空船状态下的船舶排水量,即可得船舶载重量。
2 测量方法简介
本文拟采用惯性传感器实时测量各传感器的姿态,通过单片机对姿态数据进行处理分析,并向传感器所在的云台发送控制数据,实时调整传感器的姿态,始终使传感器与水线面垂直,提高船舶吃水测量的精度和实时性。同时,各个吃水测量终端的测量结果均通过无线自组织网络发送给上位机,当吃水测量终端离上位机距离较远时,可通过其他终端转发吃水测量结果。上位机接收到各终端的吃水结果,经过数据处理得到船舶等容吃水。
2.1 船舶吃水测量终端
结合船舶实际情况,每个船舶有固定的六面水尺标线,我们根据测量需求,在船体的吃水标志线处安装船舶吃水测量系统,总共布置6 个测点,几乎所有船舶的吃水测量标线都是在船艏、船中、船尾。船舶吃水测量终端同时连接无线自组织网络,通过系统终端向各测量点的无线装置发布指令,可以控制最多6 台雷达测距仪实现同步测量。测量数据经无线模块传输至测量系统的终端采集器,由后台处理中心完成数据计算、存储和显示,把数据传输到驾驶台,雷达测距仪终端通过磁铁与船舶连接。
2.2 船舶吃水测量终端结构
以单片机为核心,系统中的惯性传感器和雷达测距传感器都连接在云台上,单片机给云台发送控制指令,仪器开始工作时,惯性传感器和雷达测距传感器分别传输姿态数据和测距结果到单片机上,数据返回到云台上进行镜头修正并反馈指令。测距工作结束后,通过无线网络发送测量数据。
3 船舶吃水测量流程
系统开始运作时,处于初始化状态开始系统自检,确保每一个板块运作正常,如果出现故障,则进行修复或者报警,完成后再次自检。确认没有故障后,我们的系统将会进行惯性传感器测量云台姿态,再根据云台姿态数据发送控制指令调平云台。这时发射雷达脉冲测出雷达传感器到水线面的距离,根据船型指标推算船舶吃水。最后再将船舶吃水与云台姿态发送到上位机,系统结束以上流程后,判断是否结束系统测量,如收到结束命令,则测量吃水整个流程结束,否则就再次返回到惯性传感器测量云台姿态的步骤,然后继续测量。
4 实验结果及分析
4.1 实验过程
本文先是做了一个预实验,考虑到经费问题,采用测距传感器进行实验。利用惯性传感器实时测量测距传感器的姿态,并通过云台实现测距传感器姿态自动调整,时刻保持测距传感器与水面垂直,通过此过程得到水面到仪器的距离,本作品采用卡尔曼滤波方法对测量结果进行处理。将无线自组织网络用于吃水测量终端与上位机之间的数据传输,若测量终端与上位机之间距离较远,可通过其他终端进行数据中继转发。
4.2 调平测距实验
如图2 所示,通过实验我们可以发现测距传感器始终平行于水面,无论船舶怎样倾斜船体,惯性传感器都可以自动调平测距仪器。

图2 实验与仪器图
通过测距传感器其(如图2)来测量水线面到仪器的距离,遇水面后反射回来。
测距测量平均5ms 测一次距离,使得测量值更加的精确,结束测距后,我们可以得到水面距仪器的高度数据,通过卡尔曼滤波方法对测量结果进行处理,最后返回数据到电脑端。
5 结论
本文提出的船舶吃水测量系统,主要是由上位机(船舶驾驶台)和船舶吃水测量终端构成,经过对系统设计与计算,可以有效进行船舶吃水的实时检测,误差范围在有效的范围之内,确保了船舶吃水测量的精度。为船舶在营运过程中的吃水实时测量提供了实践依据,有一个很好的发展前景。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
摄影之友(影像视觉)(2020年2期)2021-01-14
影像视觉(2020年2期)2020-03-19
科学(2020年3期)2020-01-06
电子制作(2019年23期)2019-02-23
车迷(2018年12期)2018-07-26
摄影之友(影像视觉)(2017年11期)2017-11-27
电子制作(2017年7期)2017-06-05
山东工业技术(2016年15期)2016-12-01
太空探索(2014年1期)2014-07-10
