基于SHEKF-GPM融合的锂电池SOC估算
2020-11-27 03:06
湖南工业大学学报 2020年6期
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
1 研究背景
随着微电网技术和新能源汽车的发展,储能装置得到了广泛应用。锂电池因具自放电率低、能量密度高、循环寿命长、价格适中、无记忆效应等优点,成为储能装置的首选[1]。但锂电池一旦发生故障便会带来各种问题,如因锂电池的过热或短路会导致灾难性的爆炸事件、产生高额的维修费用等[2]。锂电池的工作原理是将化学能转化为电能,其荷电状态(state of charge,SOC)估算对锂电池的充放电优化控制、可靠性提升等有重要价值,能反映电池当前的剩余容量,是表征电池放电状态的重要指标[3-4]。因而优化锂电池维护过程、估算锂电池SOC 为大势所趋。锂电池的工作特性呈现非线性,实际工况较复杂,受温度、电流、自身老化等因素的影响,使得精确估算锂电池SOC 成为该研究领域的难点之一[5]。
目前,锂电池SOC 的估算方法包括:
1)电流积分法和开路电压法[6]。前者需对电池电量进行长时间记录和监控,电流测量误差会在积分过程不断积累,后者需较长静置时间找出与之匹配的外界条件,会导致SOC 估算值与真实值间存在差距,难以在实际估算中应用。
2)电化学阻抗谱法[7]。该法因含有大量的电化学参数,阻抗谱分析仪器昂贵,仅用于实验室研究电池内部特征,不利于工程推广。
3)神经网络法[8]。因该法需要训练大量的样本数据,故其预测精度及训练时间依赖所选的数据和训练方法。
4)扩展卡尔曼滤波(extended Kalman filer,EKF)法[9]及其与其它方法结合。在估算电池的SOC 时,可以将SOC 看作电池系统的一个内部状态变量,通过遗忘因子递推最小二乘法(forgetting factor recursive least squares algorithm,FFRLS)实现最小方差推算,能够消除误差累积现象,并且不需要大量的实验数据,易于实现。
5)等效电路模型法[10-11]。该法通过具体的模型参数来描述锂电池的非线性动态特性,使得参数辨识过程简单,降低了处理器的运算难度,提高电池管理系统的工作效率。
基于EKF 与其他方法融合的优点,本文提出一种基于平方根高阶扩展卡尔曼滤波算法(square-root high-degree extended Kalman filter,SHEKF)与灰色预测模型(grey prediction model,GPM)融合的锂电池SOC 估算算法。该算法采用FFRLS 并结合二阶RC(resistance capacitance,RC)等效电路模型实时在线辨识和修改锂电池模型参数;结合SHEKF-GPM融合模型进行锂电池SOC 状态方程的线性部分和非线性部分估算。最后,通过仿真得到SHEKF-GPM融合算法估算SOC 时的误差低于3%,协方差误差维持在0%左右,不会产生误差累积,验证了所提方法在减少误差累积,提高实用性、有效性和估算精度方面具有一定的优势。
2 模型和参数
2.1 锂电池电路模型的建立
电池模型用于描述电池的影响因素与工作特性之间的数学关系。目前锂电池模型的种类主要有等效电路模型、神经网络模型、电化学模型和特定因素模型等[12]。综合考虑模型精确度、复杂程度及实验选用的材料,本研究用如图1所示的二阶RC 等效电路模型描述所提方法的锂电池参数辨识和SOC 估算。
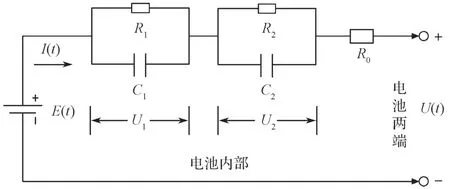
图1 二阶RC 等效电路模型Fig.1 Second order RC equivalent circuit model
图1中:E(t)为锂电池开路电压;U(t)为电池端电压;I(t)为端电流,箭头表示电池处于放电状态;R1、C1及R2、C2分别用于描述电池的浓差极化内阻和浓差极化电容;R0为锂电池欧姆内阻。
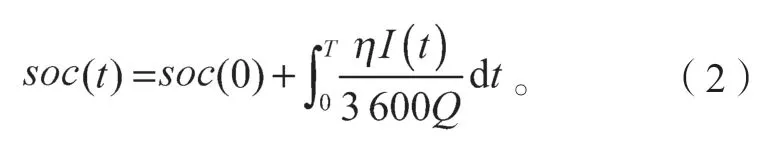
锂电池的工作过程较为复杂,其运动过程分为电极间的传输过程和电极上的扩散过程。根据基尔霍夫定律,由图1可建立电池的等效模型状态空间方程,式(1)为其测量方程。
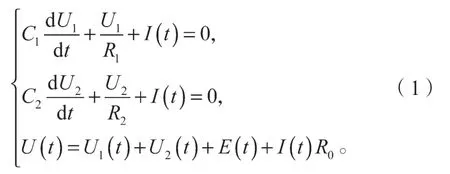
SOC 为一定倍率放电条件下电池剩余电量与相同条件下额定容量的比值,其计算式为
式中:Q为电池容量;η为充放电效率。
式(3)为电池的状态方程,式(4)为等效电路模型状态方程。
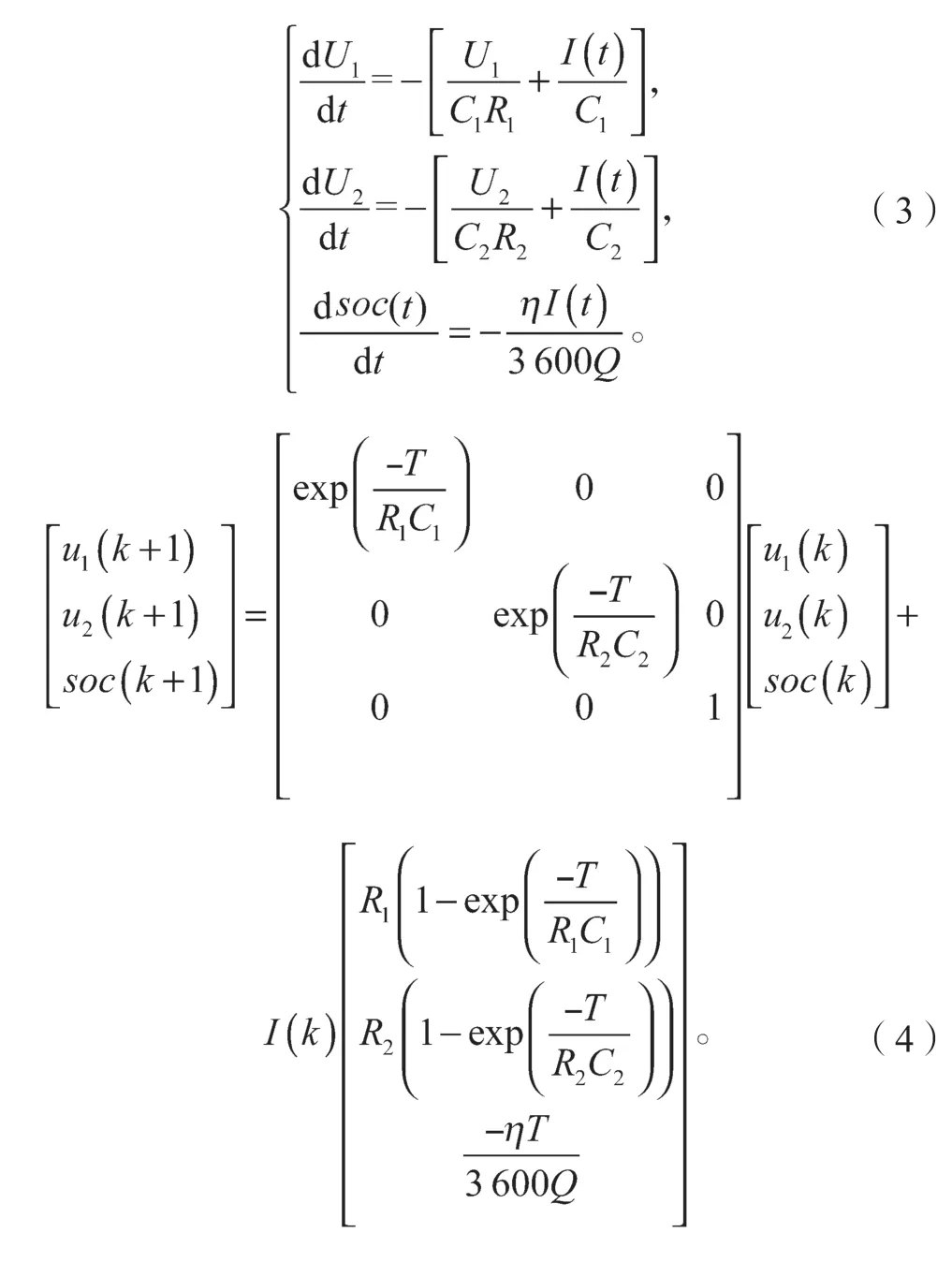
式中:T为电流采样时间;soc(k)为k时刻荷电状态;u(k)为k时刻电压;k为离散时间,表示物理量对应的时刻。
2.2 电池模型参数辨识
为准确跟踪锂电池模型参数,需要使用离线或在线辨识方法[5]。电池工作环境复杂多变,离线辨识需要依靠前期采集的充放电实验数据,很难保证离线数据在当前的工况下适用;在线辨识依靠当前状态计算出模型的实时参数,不用参照前期的工作量,更适用于实际工况。FFRLS 可以很好地适用于直线拟合系统参数辨识,系统更重视当前的参数,加强新数据提供的信息量,逐渐减弱旧数据,防止数据达到饱和状态。FFRLS 的基本思想,是新估算值θ^(k+1)在旧估算值θ^(k)基础上,利用新观测值对旧估算值θ^(k)进行修正得到的,无需存储全部数据,取其中一组观测数据便可估算一次参数。且其能够实现实时在线辨识,逐次引入观测数据重复参数估算,当参数估算结果达到满意精确度时停止运行[13]。为此,本研究采用FFRLS 实时在线辨识锂电池二阶模型参数。
具体的在线辨识过程如下:在图1中,I(t)是等效电路的端电流,根据基尔霍夫定律得电池输出电压Us为开路电压E(t)与端电压U(t)之差,由拉普拉斯变换可得频域算式(5),将式(5)展开后可得差分方程式(6)。

式(5)(6)中:s为系统平面的映射;α、β为电池模型参数。

式中:Uk为FFRLS 离散化处理值;ξk为零均值高斯白噪声,含模型噪声和测量噪声。
由测量数据进行参数递推辨识的FFRLS 递推公式如式(8)所示,由式(8)即可求出α1、α2、β0、β1和β2的值。

式中:Pk、Kk分别为协方差矩阵和增益因子;yk为输出信号。
3 融合算法设计
因锂电池参数辨识模型呈非线性,不能直接采用EKF 估算SOC。非线性滤波器是针对状态方程和输出方程均为非线性系统提出的,沿用非线性滤波器估算电池的SOC 时,使用数值积分近似求解,增加了不必要的计算量[14]。针对以上问题,本文提出一种基于SHEKF-GPM 融合的锂电池SOC 估算算法,其模型如图2所示。
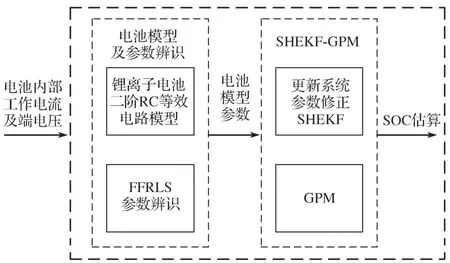
图2 SHEKF-GPM 融合模型Fig.2 SHEKF-GPM fusion model
由图2可知,SHEKF-GPM 融合的锂电池SOC估算算法将锂电池模型、参数辨识、SHEKF-GPM 融为一体,该融合模型迭代过程包含如下步骤。
步骤1SOC 初始化。
给定算法初始值:x(0)、初始时刻v(k)的协方差R0及状态估算误差协方差矩阵Pk的平方根Sk,由于数值计算误差会导致Pk失去正定性,故引入平方根Sk的滤波技术进行传播,从而改善系统数值的稳定性,提高迭代过程中的数值精度。
步骤2估计状态变量先验值。
采用GPM 完成k时刻系统状态变量的先验估算,即将灰色卡尔曼滤波算法中的系统中间状态变量看作随机变化的灰色发展过程,对灰色发展过程建立GPM。

步骤3更新系统状态先验估算值与估算误差协方差矩阵。
《揭秘恐龙》以时间为经,全景式地展现了恐龙的兴衰、演变;以食性为纬,详细介绍了不同恐龙的不同生存技能。《揭秘太空》循序渐进地讲述了有关太空的全方位知识。《揭秘地球》详细介绍了有关地球的各种知识,一探我们身之所处的地球的神奇与伟大。《揭秘人体》了解自我从了解人体开始,丰富有趣的人体知识,让孩子在获得知识的同时,学会如何保护自己,健康成长。
步骤4构造容积点。

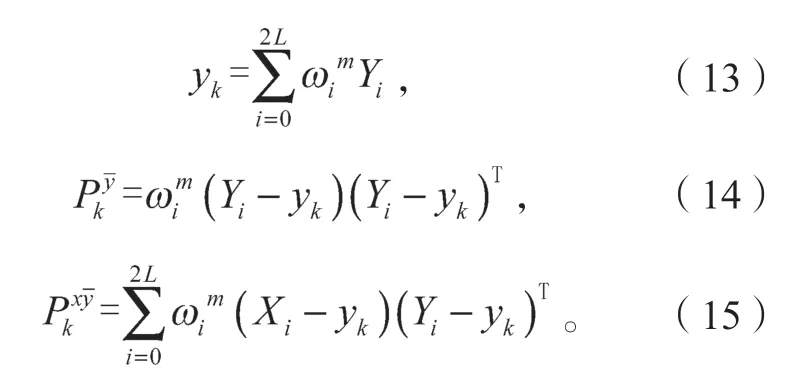
步骤5测量估算yk,估算协方差和联合协方差。
步骤6计算SOC 卡尔曼增益。

步骤7估算SOC 状态更新协方差平方根。

步骤8输出SOC,并且返回步骤3,循环直至结束。
4 仿真分析
为了提高锂电池SOC 估算的准确性,建立了SHEKF-GPM 融合算法估计模型。即将恒流条件下获得的SOC 数据代入模型中,作为系统输入,并进行仿真分析。图3所示为SOC 真实数据和估算数据仿真结果对比,SOC 的初始值设定为100%。
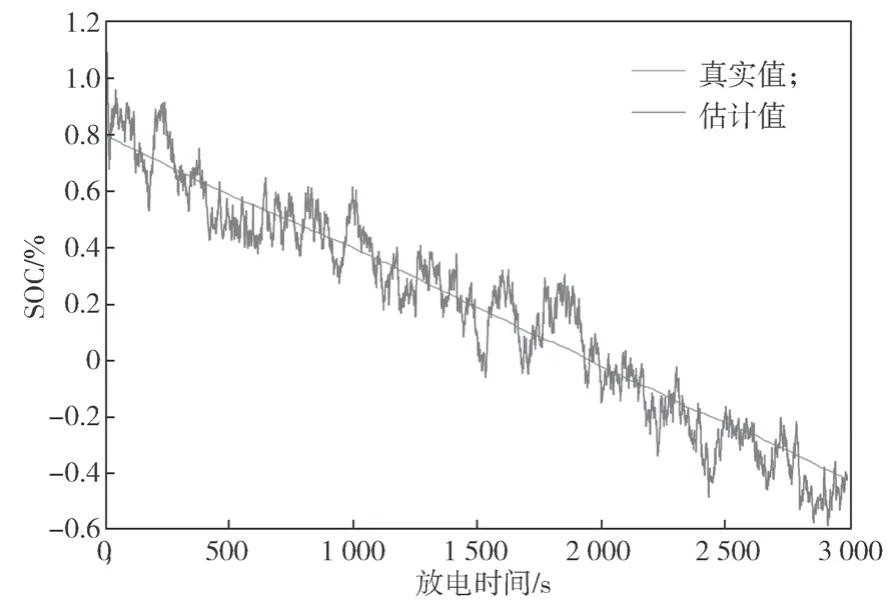
图3 恒流放电下SOC 的真实值与估计值仿真结果对比Fig.3 Comparison of simulation results between the real and estimated SOC under a constant current discharge
由图3可知,随着放电时间的增加,融合法能够较好地适应复杂化的环境,放电过程中存在的误差是由锂电池开路电压与SOC函数关系不明确所导致的,估计值通过循环递推逼近真实值。
图4所示为FFRLS 算法在线识别锂电池端子电压的真实值和估计值。在相同的工作条件下,随着放电时间的增加,SOC 值逐渐减小。

图4 锂电池端子电压的真实值和估计值Fig.4 Real and estimated values of terminal voltage of lithium battery
从图4可以看出,在恒流充电条件下,高倍率放电环境下电池电压变化较大,二阶RC 等效电路模型具有拟合性能,随着放电时间的增加,使得模型的端电压部分发散,FFRLS 参数在线辨识算法能够实时更新锂电池系统模型的参数,实现锂电池参数的精确估计。
为了验证SHEKF-GPM 融合前后SOC 估算曲线的收敛能力,借助Matlab/Simulink 搭建仿真实验平台,对SOC 估计前后的结果进行了比较,结果如图5a所示,在整个放电过程中,电池共进行了10 次完整的放电过程,每次放电100 s,放电过程至第8 次时达到SOC 放电的截止电压,SOC 随放电电流变化呈现单调非线性下降趋势。融合SHEKF-GPM 算法后的仿真图如图5b所示,可见曲线的拟合度较高,系统具有较好的收敛性能,同样的初值对其收敛时间的影响并不大。通过对比实验,表明所提融合模型能精确地估算锂电池SOC。
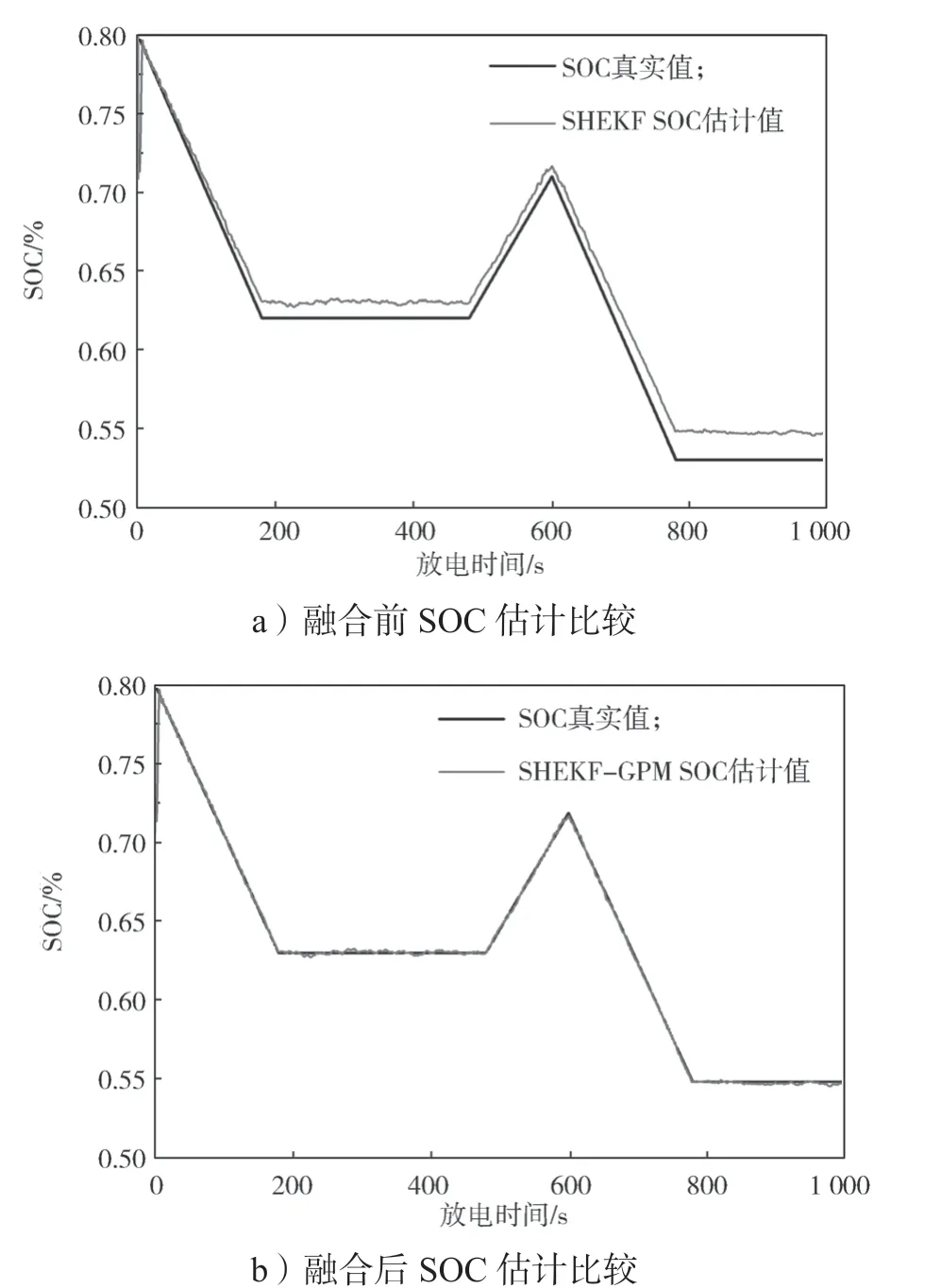
图5 融合前后SOC 估算曲线比较Fig.5 Comparison of SOC estimation curves before and after fusion
图6和图7分别为SHEKF-GPM 融合后的SOC估计误差和协方差误差仿真结果图。由图6可看出,融合模型的锂电池SOC 估算误差不会随着时间的延长而增大,且能保持低于0.3%,具有较高的精度与跟踪性。可见,二阶RC 等效电路模型对锂电池具有良好的跟踪动态特性,电池的整体估计误差较小,且FFRLS 可以实时更新电池模型的参数辨识,利于锂电池参数的准确估计;协方差误差可以定量地反映预测算法的复杂度和预测精度。从图7可看出,融合SOC 后的协方差误差维持在0%左右,不会存在严重的累积误差,估计值能很好地跟踪真实值,误差较小,预测精度较高,进而验证了所提融合模型的可行性和有效性。
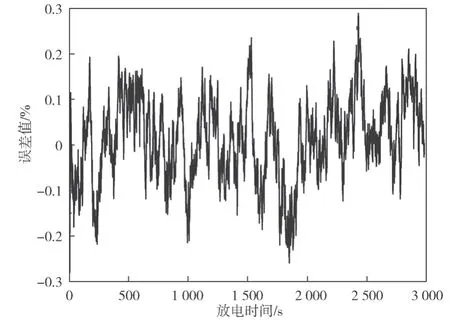
图6 融合SOC 估计误差的仿真结果Fig.6 Simulation results of SOC estimation error fusion

图7 融合SOC 协方差误差的仿真结果Fig.7 Simulation results of SOC covariance error fusion
5 结语
针对锂电池二阶RC 等效电路模型,通过FFRLS对参数进行在线辨识是锂电池应用中的重点和难点。本文提出SHEKF-GPM 融合的方法估算锂电池SOC,基于二阶RC 等效模型,以表征锂电池的工作特性。通过FFRLS 进行参数在线辨识和修改电池模型参数;创新性地提出SHEKF-GPM 融合算法进行锂电池SOC 在线估算。仿真与试验对比分析结果表明,该模型下的SOC 估计误差均低于0.3%,协方差误差维持在0%左右,不会产生误差累积,具有较高的精度,因而验证了所提融合模型的可行性。
所提融合模型虽为锂电池SOC 估算提供了一种新的方法,但采用SHEKF-GPM 融合的SOC 估算方法较为复杂,在保证提高SOC 估算精度的前提下,后续工作将着重研究预估算法的优化处理。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
中等数学(2021年9期)2021-11-22
计算机应用与软件(2019年2期)2019-04-01
经济研究导刊(2018年19期)2018-07-24
雷达学报(2017年3期)2018-01-19
汽车文摘(2017年3期)2017-12-08
考试周刊(2016年54期)2016-07-18
中学数学杂志(初中版)(2016年3期)2016-06-24
湖南师范大学学报·自然科学版(2014年3期)2014-10-24