
面向AUV水下移动对接的实时路径规划方法
2020-11-27 06:47时常鸣刘开周赵宝德
舰船科学技术 2020年5期
时常鸣,刘开周,赵 洋,赵宝德
(1. 中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016;2. 中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110016;3. 中国科学院大学,北京 100049)
0 引 言
自主水下机器人(Autonomous Underwater Vehicle,AUV)是探索海洋空间的有力工具之一,在海洋科学考察和海底资源勘测等领域获得广泛应用。利用水下对接平台对AUV进行自主对接,可以实现AUV能源补充、数据上传和使命下载,从而增强AUV的续航力与作业能力,降低AUV的应用成本。而AUV与移动对接平台之间的实时路径规划技术,是AUV与水下对接平台自主对接的使能技术之一。
Ken T等[1-2]提出一种基于TSK模糊理论的AUV对接控制方法,利用AUV与水下固定式对接平台之间的横向误差、纵向误差、AUV的期望纵向速度和艏向角建立相应的模糊策略,通过仿真实验和实际实验结果证明,该方法可使AUV在没有障碍物和海流未知的情况下回收到水下固定对接平台内;Jantapremjit P等[3-4]将对接阶段分为2个阶段,利用切换加权系数的人工矢量场法,使AUV沿着水下固定对接平台的中轴线运动,达到对接所需方向和位置最终实现AUV的安全对接;李晔和姜言清等[5-6]提出一种基于3次B样条和遗传算法的AUV小范围静态路径规划方法,该方法满足AUV对接过程中所需的终端约束和运动约束。上述方法都是AUV与水下固定对接平台之间的路径规划方法,存在容易陷入局部极值或运算复杂规划时间长等缺点,无法满足环境未知的情况下,AUV与水下移动平台对接的实时性需求。
本文针对复杂动态环境下AUV与水下移动平台对接的实时性和终端姿态需求,研究了一种基于混合整数线性规划[7](Mixed Integer Linear Programming,MILP)的AUV与水下移动平台对接路径规划方法,根据对接阶段的需求设计了不同的目标优化函数,实现了移动对接目标函数建模,对障碍物约束和AUV本体约束进行了相应的线性化,建立起由线性化约束和目标函数组成的线性规划模型,在相对速度坐标系下实现对AUV加速度的优化,实时规划出AUV相应的纵向速度和艏向角,并充分考虑AUV实际的动力学模型,最终在AUV与水下移动平台之间得到满足所有约束且目标函数最优的实时优化路径,利用仿真实验验证该方法的有效性。
1 问题描述
本文将对接过程分为2个阶段:归航阶段和终端导引阶段[8-9]。第1阶段,AUV通过超短基线等传感器快速到达对接平台前方一定距离位置[10];第2阶段,AUV通过高精度传感器(声、光、磁等)进行精确导航定位,根据当前的位置和艏向,以及水下对接平台的位置及艏向,最终以期望的航向姿态完成欠驱动AUV与水下移动对接平台之间的精确移动对接。
MILP是在线性规划(Linear Programming,LP)的基础上发展而来的一种优化方法,它融入了整数变量,可以解决具有复杂逻辑关系的实数-整数混合优化问题。为了利用MILP优化方法更好地解决AUV与水下移动平台之间的实时优化路径规划问题,在此,进行相关假设和简化:

图 1 AUV与水下移动平台对接过程示意图Fig. 1 Diagram of docking process between AUV and underwater mobile platform
1)设AUV、障碍物和水下对接平台的当前时刻的相对位置和相对速度已知,且下一时刻的相对位置和相对速度未知;
2)设在极小时间周期内,障碍物和水下移动平台的速度保持不变;
3)设对接阶段水下对接平台航行速度小于AUV的速度;
4)设水下对接平台沿着水下移动平台的中轴线方向移动。
2 约束建模
2.1 障碍物约束的线性化
如图2所示,设E-ξη为固定坐标系,点A表示AUV,点O表示为障碍物的圆心;VA和VO分别表示为AUV和障碍物的当前速度矢量,VAO表示为AUV和障碍物之间的相对速度矢量,VAO=VA-VO;LAO表示为AUV和障碍物之间的相对位置矢量; γAO表示为之间的夹角,以VAO在LAO右侧为正,取值范围为 (-π,π], 同理,与边界AM或AN的夹角,表示为单位时间内γAOC的改变量。


图 2 AUV-障碍物示意图Fig. 2 Diagram of AUV-obstacle
为了使AUV可以避开多个障碍物,障碍物约束的线性化模型可以写成:

其中:i=1,2,...N。
为了解决AUV避开障碍物时的转向问题,可以将式(2)写成:

其 中ai+bi=1,ai和bi都 为 二 进 制 变 量 ,κ 为 远 大 于 不等式左侧的正实数。
当ai=0,bi=1时,式(3)中前2个等式成立,表示AUV从障碍物的右侧避开障碍物;
当ai=1,bi=0时,式(3)中后2个等式成立,表示AUV从障碍物的左侧避开障碍物。
2.2 AUV本体约束
考虑 AUV动力学模型,由于螺旋桨的转速极限约束,欠驱动AUV航速不会太大,由AUV操纵性知识可知,过低的航速会导致方向舵失效。假设在单个采样周期Δt内自主水下机器人的速度和加速度保持不变,且满足约束:

联立式(4)和式(5)得加速度分量约束如下:

3 目标函数建模
目标函数是根据AUV与水下移动平台对接的任务需求来确定的。在AUV回收的第1阶段,目的是尽快缩短AUV与水下移动平台的距离,并快速到达大致预定位置,这里与其他AUV路径规划问题类似,只需要解决目标点的到达问题;第2阶段,目的是AUV以期望的航向姿态尽快与水下移动平台完成对接,这里与其他AUV路径规划问题不同的是,不仅需要解决目标点的到达问题,还要保证AUV是以期望方向到达目标点。
3.1 距离收敛
为了使AUV与水下移动平台之间的距离越来越近(见图3),即,则可以写作:

其中,分别表示为AUV与水下移动对接平台之间的相对位置矢量和相对速度矢量,表示在单个采样周期内的变化量。
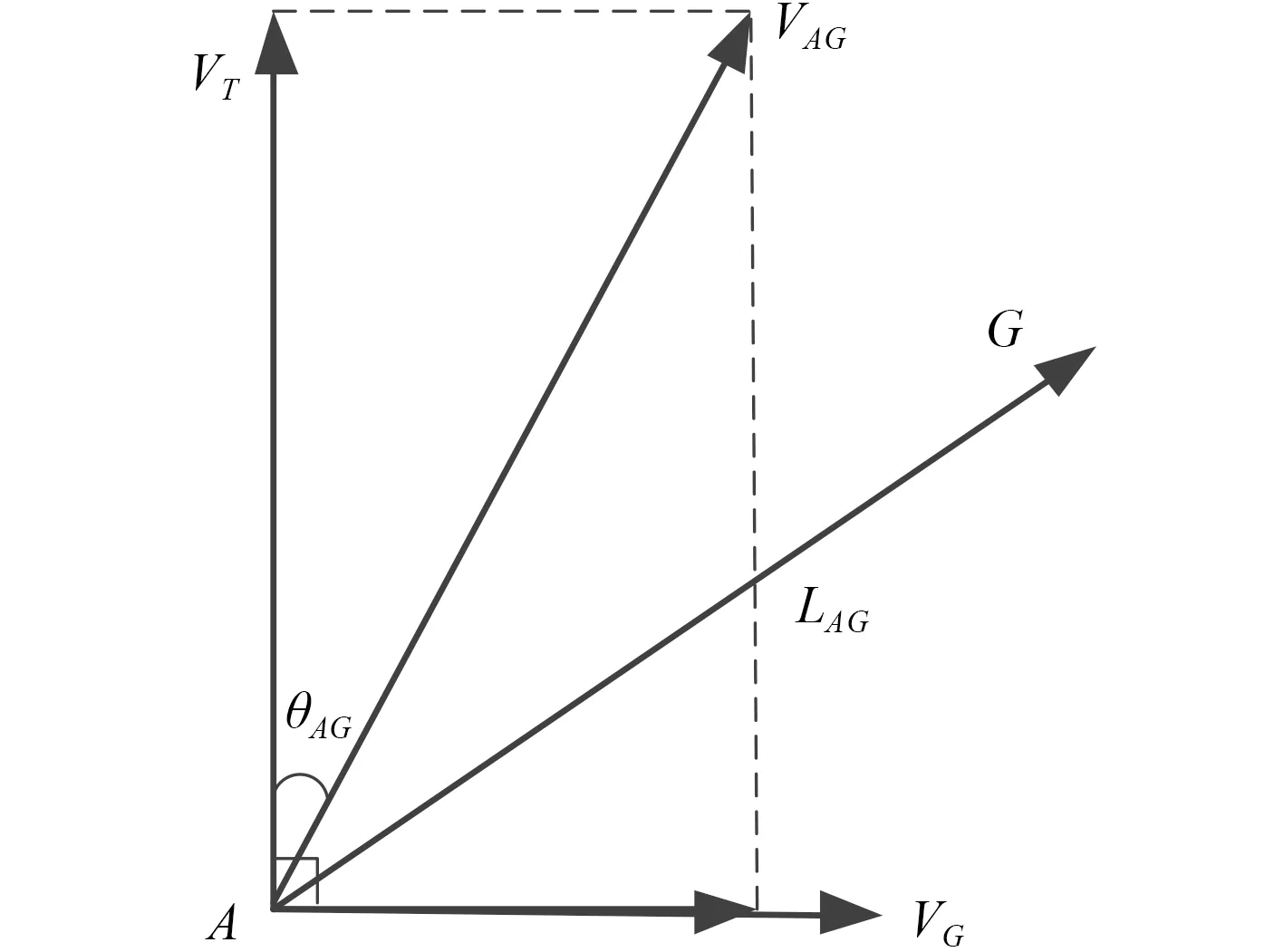
图 3 相对速度的速度分解Fig. 3 Velocity decomposition of relative velocity
为了方便计算,式(7)写作:

其中,j表示维数。
3.2 时间最优
为了尽快缩短AUV与水下移动对接平台之间的相对距离,AUV与目标的相对速度VAG在沿着相对位置矢量LAG上的分量应该最大,即

经过线性化[11]以及为了与距离收敛目标函数式(8)相对应,式(9)最终为:

3.3 姿态最优
为了使AUV以期望的航向姿态与水下移动平台完成对接,AUV与目标的相对速度VAG沿垂直于水下移动平台移动速度VG的分量应该最大,即

设n为VT的 单 位 向 量 , 为 了 使的 同一侧,则n可表示为:

令

根据泰勒公式可知:

其 中 , ∇f=n表 示 函 数 f(VAG) 的 梯 度 ,o(||ΔVAG||)表 示泰勒余项。
忽略高阶项,以及为了与距离收敛目标函数式(8)相对应,式(11)最终为,

3.4 移动对接目标函数建模
在AUV与水下移动平台对接的第1阶段,只需要考虑目标点到达问题;在第2阶段,不仅需要考虑目标点达到问题,还要保证AUV是以期望方向到达目标点。同时根据子目标函数的分析,可得总的目标函数:
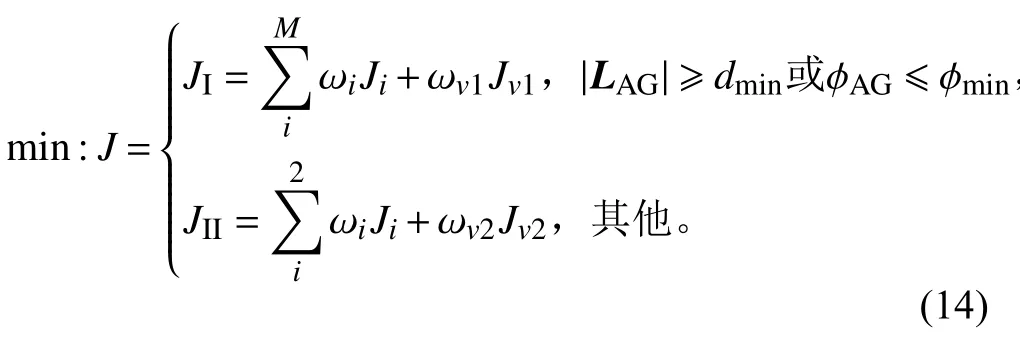
其中,i=1,2,…M,表示维数,这里取M=2,表示二维平面 , ωi,ωv1,ωv2≥0 为权值 , φAG为VG与LAG之间 的 夹角,为开始进行AUV与水下移动平台对接的第二阶段的最小距离, φmin为AUV与水下移动平台最终对接时允许的最小姿态偏差。
4 算法流程
AUV与水下移动对接平台的精确对接系统的实时路径规划流程图如图4所示。具体的算法流程如下:
1)通过传感器数据获得水下移动平台和障碍物的位置信息和速度信息;
2)对传感器约束和本体约束进行线性化,获得相应模型;
3)根据规划策略公式(14)设计相应的目标函数;
4)利用MILP规划器实现对AUV加速度的优化,并得到 期望的速度ud和 航 向ψd:

其中, (V+ΔVΔt)η, (V+ΔVΔt)ξ分别为速度矢量在η,ξ方向上的分项量;
5)将航行控制器作用于AUV的实际动力学模型上,得到实际的速度u和 航向 ψ;

图 4 算法流程图Fig. 4 Flow diagram of algorithm
6)根据实际的速度u和航向 ψ ,得到下一时刻AUV的位置,即

7)判断AUV是否到达水下移动对接平台位置,如果到达,则规划算法结束,否则返回步骤2进行下一周期规划。
5 仿真实验
仿真实验在Matlab R2015b下进行,采用PID控制器对某型AUV进行航行控制。MILP的规划周期Δt=1s,开始进行AUV与水下移动平台对接的第二阶段的最小距离dmin=50m, 允许的最小姿态偏差 φmin=15°,表1给出了仿真实验中AUV、障碍物和水下移动对接平台的位置信息和速度信息等信息。

表 1 仿真实验初始值Tab. 1 Initial value of simulation experiment
根据仿真结果可知,MILP单步规划时间约为0.18 s,可以满足AUV与水下移动平台之间路径规划的实时性需求。由图5可知,AUV可以有效避开障碍物O1和障碍物O2,AUV在位置 (83.20,103.01)处进入AUV与水下移动平台对接的第2阶段,最终在(100.00,166.50)处完成对接任务。由图6可知,AUV的纵向速度越来越大,在60 s左右达到Vmax,AUV在114 s左右进入AUV与水下移动平台对接的第2阶段,在160 s左右完成对接任务。由图7可知,AUV最终以航向角偏差φAG≈3°的航向姿态与水下移动平台完成对接,满足对接要求。
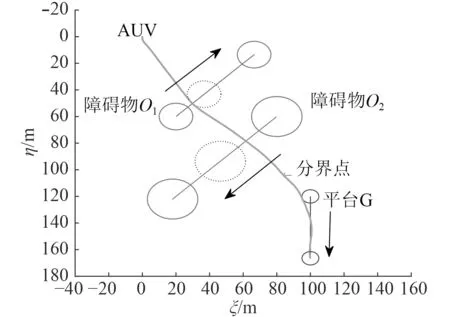
图 5 实时规划路径图Fig. 5 Real-time path planning map

图 6 AUV速度曲线Fig. 6 The velocity curve of AUV

图 7 AUV航向曲线Fig. 7 The heading curve of AUV
6 结 语
以往的大多数路径规划算法只考虑目标点的到达问题,没有考虑AUV到达目标点的姿态需求。本文针对复杂动态环境下AUV与水下移动对接平台的实时性和终端姿态需求,提出一种基于MILP的实时路径规划方法。充分考虑了障碍物约束、AUV本体约束,根据多个对接阶段的需求设计了距离收敛、时间最优和姿态最优等不同的目标优化函数,建立了移动对接目标函数,形成相应的多约束线性规划模型,实现对AUV加速度优化。仿真结果表明,该算法能满足AUV与水下移动对接平台的实时性和终端姿态需求。
AUV的期望航向在路径规划的后半程存在剧烈变化,分析可知,这是由于AUV参数的设计不太恰当导致的,需要进一步改进。下一步需要考虑海流对AUV和水下移动对接平台运动的影响,以便更好地满足实际工程需要。
猜你喜欢
学生天地(2020年3期)2020-08-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
小学阅读指南·低年级版(2017年1期)2017-03-13
诗选刊(2015年4期)2015-10-26
人生十六七(2015年6期)2015-02-28
电影新作(2014年5期)2014-02-27
计算机辅助工程(2012年5期)2012-11-21
阅读(中年级)(2009年11期)2009-04-14
