
UUV与潜艇协同作战模式及关键技术
2020-11-27 06:47常金达刘启军
舰船科学技术 2020年5期
黄 波,常金达,丁 浩,刘启军
(1. 海军潜艇学院,山东 青岛 266199;2. 中国人民解放军92196部队,山东 青岛 266011)
0 引 言
潜艇凭借其特有的隐蔽作战模式长期称霸水下战场,近年来世界强国均将其作为海上重要遏制力量加以发展,现代新型潜艇的生命力和作战能力大幅提升。与此同时,无人水下航行器(UUV)在军事应用方面取得丰硕成果,一些国家已开始着手构建相应的水下无人作战体系[1]。伴随各种反潜技术和兵力战法的研究应用,潜艇水下行动和作战运用面临更加复杂的形势,传统的潜艇作战运用模式面临诸多挑战。
显而易见,未来潜艇兵力的高效运用首要解决的仍是隐蔽前提下的战场感知能力,这必须加强其外围的信息支援保障。传统的对潜信息支援保障存在被动性、非实时性和有限性,不利于潜艇水下行动的自主性和应对突发情况。为此,本文研究UUV伴随保障潜艇水下行动的协同作战模式,以有效改善潜艇对水下环境及敌情实时感知能力。
1 潜艇水下行动面临的问题
潜艇非编队执行任务较为普遍,这种情况下主要是依靠前期情报研判和自身侦测手段,再结合有限的外部信息指令开展水下行动。基于潜艇常规装备技术和作战需求,目前主要面临4个突出问题。
1.1 复杂情形下的水下航行安全存在隐患
长时间的水下航行是潜艇最基本的作战运用模式,其安全问题则首当其冲。一方面由于海洋环境的复杂性和多变性,水下自主导航势必存在不确定的偏差,潜艇水下持续长航存在较大的定位误差;另一方面水下反潜预置装备和人类海洋活动遗弃物对潜艇水下航行构成严重威胁。
1.2 近程立体警戒侦察手段匮乏
为降低暴露概率,潜艇水下行动时的侦察手段仍是被动声呐和潜望镜。潜艇被动声呐一方面存在一定的盲区,另一方面对静音目标“束手无策”,而潜望镜也只能在特定条件下对有限范围进行粗略侦察。潜艇对近程敌情态势缺乏全面、及时掌控,严重影响其应急处突能力。
1.3 目标定位和识别的精准度不高
潜艇对目标的探测主要依靠被动声呐,而目标噪声信号和水声环境的复杂性严重制约目标定位和识别的准确度,影响潜艇的指挥决策和作战系统的实际效能,潜艇中远程自主攻防能力存在突出问题。
1.4 水下通信严重受限
传统的潜艇无线电通信一般是单向定时通信,时效性差。潜艇收发信时都要进行上浮机动到天线可用深度,且无法进行大量或实时信息传输。此外,水声通信存在易暴露和距离较近的缺点,潜艇使用风险较大。潜艇的水下通信现状严重影响其作战运用和作战效能。
2 UUV与潜艇的协同作战模式
搭载相关功能模块的UUV,借助一定的技术手段与潜艇保持高效通信,可以充当潜艇水下探测和通信的外围节点,为独自执行任务的潜艇提供所需的支援保障。针对潜艇独立执行任务时的战场环境和信息保障需求,其协同作战模式主要为4种。
2.1 UUV保障潜艇水下安全航行模式
潜艇水下航行安全主要面临的威胁有:长航导致的定位偏差;水下不明障碍物;复杂航道或水文情况。为此,UUV与潜艇之间保持如图1所示的编队航行模式,一方面充当水下航道情况的“探路者”,另一方面根据指令上浮校准地理坐标。

图 1 UUV保障潜艇水下航行编队示意图Fig. 1 Schematic of submarine underwater navigation support with UUV
根据不同的航道特点和作战环境,UUV保障潜艇水下安全航行有具体的运用方式及相关要求。
2.1.1 深远海的水下巡航保障方式潜艇在深远海水下航行时,海区立体空间开阔,海洋背景噪音极低,潜艇被动声呐效果很好。这种情况下,潜艇一般都是定速、定向、定深航行,其主要威胁是水文条件的突变和航道上的大型悬浮物。为此,UUV对航道上的水文情况和障碍物进行预先查探,潜艇声呐要时刻保持对前方UUV航行状态的监听。UUV在这种模式下尽量不使用暴露技术手段,一旦遇到异常情况,通过快速机动回撤的方式发出警报,在距潜艇足够近时再进行情报信息反馈。
2.1.2 近浅海的水下航行保障方式
潜艇在近浅海水下航行时,离海岸及水面航道较近,背景噪声会嘈杂,潜艇被动声呐效果较差。由于近浅海的海底形起伏较大,各类海洋作业的水下遗留物复杂,潜艇会依据海图和实际经验规划水下航路以确保安全。而对于不熟悉的近浅海水域,各类人工水下设施(如近岸反潜体系)对潜艇将构成直接的威胁。对于这种水下环境,要求UUV具备较强的侦测识别和对抗能力,同时对指挥协同提出较高要求。
2.2 潜艇布控UUV实施近程警戒侦察
当潜艇处于高等级作战部署时,一是要确保自身的安全,二是需要全面掌握周围的相关情况,对近程警戒侦察提出要求。由于潜艇的隐蔽性要求和自身侦测能力的局限性,潜艇一般通过战术机动和等待时机等方式进行侦察,遂行应变和全方位掌控能力明显不足。为此,潜艇通过布控具备自主侦察能力的UUV,实现近程全方位的警戒侦察,如图2所示。3个UUV围绕潜艇在一个水平面内成“正三角”环绕伴随保障,根据方案或指令实现全方位立体警戒或区域重点侦察。

图 2 UUV伴随潜艇水下近程警戒侦察示意图Fig. 2 Schematic of short-range guard situation of UUV accompanying submarine undersea
2.2.1 潜艇进入敏感海区的立体警戒
当潜艇进入敏感海区(敌情和水文条件较复杂)时,潜艇自身的扩展探测手段(拖曳声呐、潜望镜等)不便使用,全方位的警戒对潜艇隐蔽性和安全性极为重要。这种情况需要3个UUV与潜艇在一个水平面内组群(见图2),主要是对潜艇的声呐盲区和预定航道进行伴随警戒,也可根据需求上浮至水面对空中敌情进行侦察。
2.2.2 潜艇对水下突发情况或预定目标的侦察
潜艇水下行动突遇特情(不明噪声源或艇外异响等)时,可指挥就近的UUV抵近侦察,及时获悉准确情况,便于采取相应措施。为获知预定目标(港口码头或停泊舰艇等)的详情,可部署具备相应自主侦察能力的UUV远距离抵近侦察。这种UUV运用对其相关功能指标(航速、续航力、自噪声、探测能力和自主决策能力等)提出一定的要求。
2.2.3 潜艇对水面及海底的敌情侦察
潜艇在上浮前,为确保上浮点附近没有敌情,可指挥UUV提前上浮至预定海面对水面及空中敌情进行侦察。对于特定或可疑海区,可部署UUV下潜到海底进行实景地貌测绘或可疑目标探测。
2.3 UUV对潜艇的目标信息支援
潜艇对目标实施水下隐蔽攻击是其典型的作战运用模式,其传统的目标信息保障主要来自于自身的被动声呐系统。由于水声环境的复杂性和潜艇被动声呐的工作特性,潜艇本身对目标的探测及定位能力有限,影响了现代潜艇雷弹武器的指挥控制,相应的作战效能受到制约。而其他的信息支援主要是按照预案、借助通信手段获取的目标历史信息,信息的局限性很大,主要服务于潜艇的战略决策和战术行动。
针对潜艇实施水下雷弹攻击的目标保障需求,UUV根据作战任务提前部署在目标区域附近,通过潜艇指令实现唤醒、任务接受、目标探测和信息回传,如图3所示。为达到对指定区域的全时、精准侦测能力,需要多个UUV分级、分工组网工作。其中领导级的UUV(图3中的UUV1)负责整个UUV网群的指挥管理和情报汇总,并与潜艇保持数据通信。从属UUV根据领导级的指令,完成水下组网部署和协同侦测。

图 3 UUV对潜艇目标信息支援保障示意图Fig. 3 Schematic of UUV support submarine with target information
2.4 UUV对潜艇的水下通信保障
潜艇的水下通信主要依靠其通信声呐,与己方舰艇进行短距离、低速率通信,满足编队协同指挥需求[2]。当潜艇独自行动时,因为隐蔽性要求和实际效果较差,水声通信几乎不用。为提高潜艇水下隐蔽、快速获取情报的能力,可以采用UUV担当“通信使者”的方式,间接实现潜艇水下对外远距离通信,如图4所示。这种通信保障模式,要求UUV具有一定的战术应对(反侦测、诱骗等)能力和自主返回能力,潜艇也应配备相应的指控系统。

图 4 潜艇“通信使者”UUV运用示意图Fig. 4 Schematic of UUV apply as submarine’s message
3 潜艇与UUV协同作战的关键技术
要实现上述潜艇和UUV协同作战模式,需要面临相应的指挥控制和装备技术两大问题。指挥控制技术要求针对不同的运用模式和具体任务,实现部署和协同的自动化和智能化,这必须依托潜艇已有的技术条件和作战指挥系统;而装备技术则是要突破相关的“瓶颈”问题。基于上述协同模式和相关要求,主要的关键技术有以下几个方面:
3.1 潜艇UUV指控技术
潜艇UUV指控技术是潜艇利用通信手段,指挥控制UUV按照预定方案工作,达到预期的协同作战目的。这就需要基于潜艇已有的指挥平台,开发出相应的指控系统。由于UUV在体系中主要是提供保障支援,因此该指控系统还要具有信息综合显控功能,其系统框架如图5所示。

图 5 潜艇UUV指控系统组成框图Fig. 5 Structure frame of submarine’s UUV command control system
该UUV指控系统需要潜艇增设相应的外围设备,包括专门的通信天线和布放回收平台等。系统根据任务模式和UUV类型自动生成指控数据,依托通信模块实现指令下达、协同控制和信息综合;实时分析情报信息,自动调整行动规划,及时给出相关的决策建议。
3.2 UUV布放方案及技术
这里研究的潜艇与UUV协同作战主要分为伴随保障和远程支援两类。前者是在特定的情况下潜艇遂行部署UUV,要求保持较近的距离便于通信指挥;而后者则是任务针对性很突出,按预定计划提前部署UUV,距离潜艇较远。因此,就分别有潜艇布放和远程预先布放2种方案。
3.2.1 潜艇布放UUV及技术
对于担负遂行保障任务的UUV,由于任务的不确定性和保障的阶段性,需要潜艇具备搭载和布放UUV的能力。结合UUV的伴随运用模式,要求潜艇能安全方便布放和可靠准确的回收,同时不能影响潜艇的外部流线型和其他原有设备。为此,潜艇外部搭载UUV已被广泛认可,这需要专门设计潜艇外部的搭载平台和UUV的外形结构,满足潜艇流线外形和动态布放要求[3]。美国研发的曼塔(Manta)AUV就是潜艇外部搭载。
另外,UUV水下动基座回收技术面临诸多问题,一方面UUV水下精确控制及对准技术,另一方面潜艇表面流场对UUV回收的影响。这些对布放平台的结构功能设计和UUV导引控制技术提出了很高的要求。
3.2.2 远程预先布放UUV及技术
远程预先布放UUV根据战略意图可分为长期部署和战前预先部署两类。前者是面向战略需要、为己方提供常态的水下情报信息,后者则是针对海上可能的具体作战需求。这类情况可以借助各种运输工具(舰船、飞机、火箭等)进行提前布放,只需对UUV进行相应的安全投放设计,对平台投放技术要求不高。对于有回收价值的UUV,可以在任务结束后进行水面人工回收。这类UUV要求有较强的自主工作能力、协同能力和水下自持力。
3.3 UUV组网协同体系
多个UUV组网对潜艇构成强大的保障体系,这个体系的组网协同模式决定了UUV个体的功能指标和整个体系的综合能力。该体系一方面是UUV之间的协同关系,另一方面则是与潜艇的指挥关系。结合前面构建的潜艇与UUV协同模式,可分为集中式、分布式和集散式三类组网方式[4],其组织关系分别如图6所示。
1)集中式组网体系
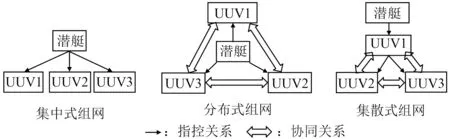
图 6 UUV三类组网关系图Fig. 6 Graph of relation of three UUV networking
该体系中的UUV均受潜艇直接指挥,并直接交互信息,UUV之间没有任何关系。这种组网方式关系简单,易于实现,适合于任务要求简单、保障范围不大的运用模式。但它对通信能力和UUV可靠性依赖度较大,系统适应性较差。
2)分布式组网体系
该体系中的UUV一方面均受潜艇直接指挥,并与其直接交互信息;另一方面UUV之间保持密切的协同关系。这种组网方式充分发挥UUV个体能力和协作优势,适合于复杂战场环境下的保障支援任务,具有较强的适应性。它对潜艇的综合指控和UUV的决策协同能力要求较高,技术实现复杂;由于通信量较大,对信号处理和数据融合提出较高的要求。
3)集散式组网体系
这种组网方式是将集中式和分布式进行了整合,是基于智能UUV优秀的决策指挥能力,减少潜艇与UUV的通信量,高效发挥UUV的自主协同能力。这种组网方式要求UUV有层级限定,便于建立体系的管理机制,最高级的UUV与潜艇进行通信,并指挥协同下级UUV开展相应的工作;同时各UUV之间保持信息交互,实现资源共享,为体系决策提供有力保障。这种体系适合于远程、大范围的情报支援,要求UUV本身具有较强的自主工作能力和较高的智能决策水平。
3.4 水声通信技术
潜艇与UUV的协同作战,主要是让潜艇在大深度下获得实时的信息支援,提高潜艇的攻防能力。水声通信则是水下指挥协同的主要手段,一方面是潜艇与UUV的水声通信,另一方面是UUV之间的水声通信。为了确保潜艇的隐蔽性,潜艇与外界的水声通信受到严格限制[5]。为此,需要根据不同的战场态势,采取低暴露的通信模式,应用先进的通信技术,确保水下信息传输的可靠性、高速率和远距离。
3.4.1 潜艇与UUV的水声通信策略
为降低潜艇水声通信带来的暴露风险,需要根据战场环境采取适当的隐蔽通信策略。基于水声通信的特点,主要采取下述策略:
1)定时、定向和短时水声通信
潜艇在开始部署任务时,就要明确与UUV的通信方案,包括通信时间、信息格式和通信方向,这个规则是根据任务需求和战场环境来确定和调整的。在确保实际通信效率的前提下,降低潜艇的暴露概率。
2)UUV“摆渡”实现低功率、远距离水声通信
通过指挥单个UUV抵近潜艇实现低功率、高速率数据通信,让潜艇水声通信信号的对外辐射很小,这个UUV再快速机动到其他UUV附近进行信息“摆渡”。这种模式可能会需要多个UUV进行“协同摆渡”,以确保足够的“摆渡”距离和较高的传输效率。
3)UUV之间同步、同制式水声通信欺扰
在复杂敌情环境下,潜艇与领导级UUV进行必要的远距离水声通信,很容易导致潜艇暴露。为此,可以指挥从属级UUV之间同步发出同制式的通信信号,干扰敌方相应的侦测和判断。
3.4.2 远程水声通信和通信组网技术
近年来,我国相关科研单位在水声通信技术、通信算法、网络协议、组网应用、协议规范制定等方面取得长足进步,相关成果已经得到实际验证[6]。这些技术应用到UUV上,使得UUV之间的通信距离和速率大幅提升[7],一方面增强了UUV组网协同工作的可靠性,另一方面使得UUV组网的覆盖范围更广、支援保障能力更强。
3.5 UUV相关技术的改进提升
UUV已经发展了很多年,在一些领域已取得了显著的应用效果。但其组网协同保障支援潜艇的实际应用很少,除了指挥协同问题外,还受到UUV自身技术的限制。针对未来使用需求,应在两大技术方面有所突破。
3.5.1 UUV的动力技术
由于UUV的体积不大,其动力性能无法与舰船相比,续航力和速度都较低,无法满足长时间的伴随保障需求。动力性能主要取决于所带能源,同时也受使用方案的影响。为此,在寻求大比能量能源的基础上,考虑搭配其他自适应动力模式(如水下滑翔);采用多速制和高效率推进器降低能耗;通过结构设计和表面工艺,减低摩擦阻力。同时,还可考虑水下中继充电技术。
3.5.2 UUV的智能技术
UUV在本文中需要对简单指令和复杂信息进行综合分析,根据规则做出决策,针对实情做出响应;在组网时,要求UUV相互之间能够密切配合,协同工作,高效完成任务指令。因此要求UUV拥有较高的智能,能自主完成相应工作。这需要加强以下方面:
1)构建完善的逻辑判断规则和科学的行为方式;
2)不断完善相关情报数据库,提高对各种情况的判断能力;
3)搭载高性能功能模块,提高其环境感知、信息处理和水下作业能力。
3.6 UUV的导航控制技术
UUV 协同潜艇作战,其导航定位精度十分重要,这要求配备相应的导航定位手段。小型的自主导航设备其定位误差较大,必须采用其他辅助导航定位手段(卫星、海底地形导航和地磁导航等)[8]。同时,洋流对UUV导航控制影响明显,可采取相应技术方案和技术措施进行补偿。对于具备自主返回对接和水下作业功能的UUV,还需加强其姿态控制精度[9]。
4 结 语
近年来,世界各国加大发展无人作战力量的建设,无人装备与有人体系的结合运用成为研究热点。潜艇在面对复杂的水下战场环境时,需要外围的情报信息支援保障,以确保自身安全和战场态势的准确获悉。UUV与潜艇的水下协同运用已在业内得到广泛认同,相关领域及技术的研究已初显成效,一些关键技术急需攻关。目前来看,潜艇搭载UUV是最简便易行一种组合方式,可以很好解决潜艇常态远航时UUV的维护使用问题,通过“一对一”的方式验证水下指挥协同方案及相关技术。而UUV组网支援保障模式对UUV本身和布放回收提出较高要求,其技术实现面临较多问题,但水下无人装备的组网工作模式是大势所趋,UUV组网与潜艇协同作战将极大改善潜艇的信息保障模式,对提升潜艇执行复杂任务能力和自主攻防能力具有显著作用。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
小哥白尼(军事科学)(2022年1期)2022-04-26
北方文学(2020年22期)2020-09-08
福建文学(2019年12期)2019-08-06
汽车观察(2019年2期)2019-03-15
军事文摘·科学少年(2018年6期)2018-09-06
民生周刊(2017年19期)2017-10-25
扬子江(2016年1期)2016-05-19
扬子江诗刊(2015年5期)2015-11-14
