天文观测卫星动中探测机动测试系统设计
2020-11-26 08:21:54陈洪亮罗荣蒸谭志云张若林王英爽刘鹤
中国空间科学技术 2020年6期
陈洪亮,罗荣蒸,谭志云,张若林,王英爽,刘鹤
1. 北京东方计量测试研究所,北京 100086 2. 北京空间飞行器总体设计部,北京 100094
面向天文观测的空间科学卫星是对空间中的目标天体或天区进行观测,一般包括巡天扫描、定点观测、小天区扫描观测等工作模式[1],除了要完成全天球扫描覆盖以外,还需要对某些重要的局部小天区进行深度成像观测。小天区深度成像和巡天观测相比,主要是增加对局部天区的观测时间以达到更高的灵敏度,进而发现更多的空间天文信息。为实现小天区扫描任务,面向天文观测的某卫星设计了小天区动中探测工作模式,观测目标为惯性空间某一有限张角的区域,通过整星姿态的旋转使载荷光轴指向沿行扫和轴向方向连续运动,实现扫描覆盖。为提高曝光深度,要求行扫速度为多级可调[如0.01(°)/s、0.03(°)/s、0.06(°)/s等],行间隔为多级可选(如0.1°、0.2°、0.3°等)。该机动模式过程复杂、姿态实时变化、指标要求更高,难以直接有效验证。
系统级测试是地面开展的整星综合测试,旨在验证卫星功能性能的符合性[2],姿态机动能力的验证评估是其重要环节。一些学者针对姿态机动开展了星上轨迹规划算法研究和分析统级、系统级测试设计研究。文献[3-4]分别设计了卫星对地观测模式和对日定向模式姿态机动控制律;文献[5]考虑执行机构失效情况的不可预测性,设计了自适应操纵律,实现了空间站的大角度姿态机动;文献[6-7]设计了控制分系统仿真系统,为姿态机动测试提供验证环境;文献[8]设计了主控机、动力学模型和数据分析系统,满足对地观测敏捷卫星分系统级姿态机动测试;文献[9]针对利用姿态机动进行天线方向图测试问题,给出了地面操作及操作计划制订方法,并通过工程实际验证了该方法的有效性;文献[10]针对SGCMG群敏捷卫星,提出一种姿态机动测试用例设计方法,实现了对SGCMG群敏捷机动能力与系统指标的全面考核。上述研究完成了测试用例设计、可视化判读基础理论分析,构建了对地观测卫星分系统级机动测试环境,但对于动中探测整星测试缺乏系统性研究。且空间科学卫星具有惯性空间定向、适应多种姿态机动观测模式等特点,需在观测不同类型天区时快速改变其观测模式,传统的对地观测卫星测试环境和测试方法难以对其进行有效验证。
本文根据某天文卫星任务特点,分析其长期任务中姿态指向模式的约束条件,设计了动中探测姿态整星系统级机动测试环境,并通过对该系统完成卫星整星多模式姿态机动测试,验证了动中探测模式的有效性及其功能指标满足设计要求。
1 惯性空间动中探测工作模式
(1)巡天观测模式
卫星首要任务是获得和绘制X射线天图,其主要技术指标是实现全天球扫描覆盖。卫星采用对日定向慢旋的方式实现全天球扫描覆盖,星体某一轴对准太阳,载荷光轴垂直于对日轴并使整星绕对日轴自旋,利用地球绕太阳公转及卫星绕本体轴的自旋实现对全天球的扫描覆盖[11-13]。其观测等效示意如图1所示。
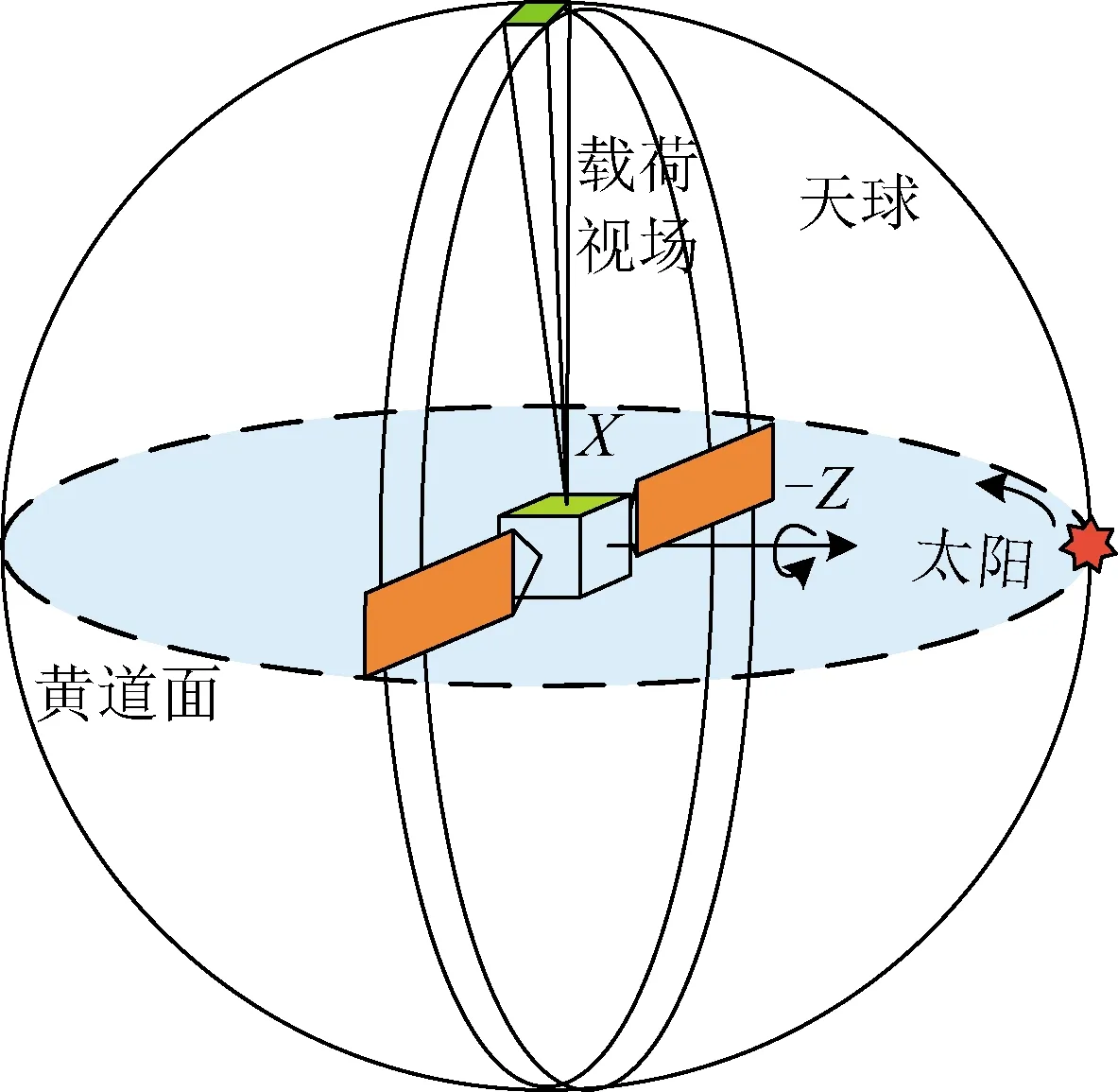
图1 巡天观测等效视运动示意Fig.1 Diagram of sky survey observation equivalent motion
(2)小天区观测模式
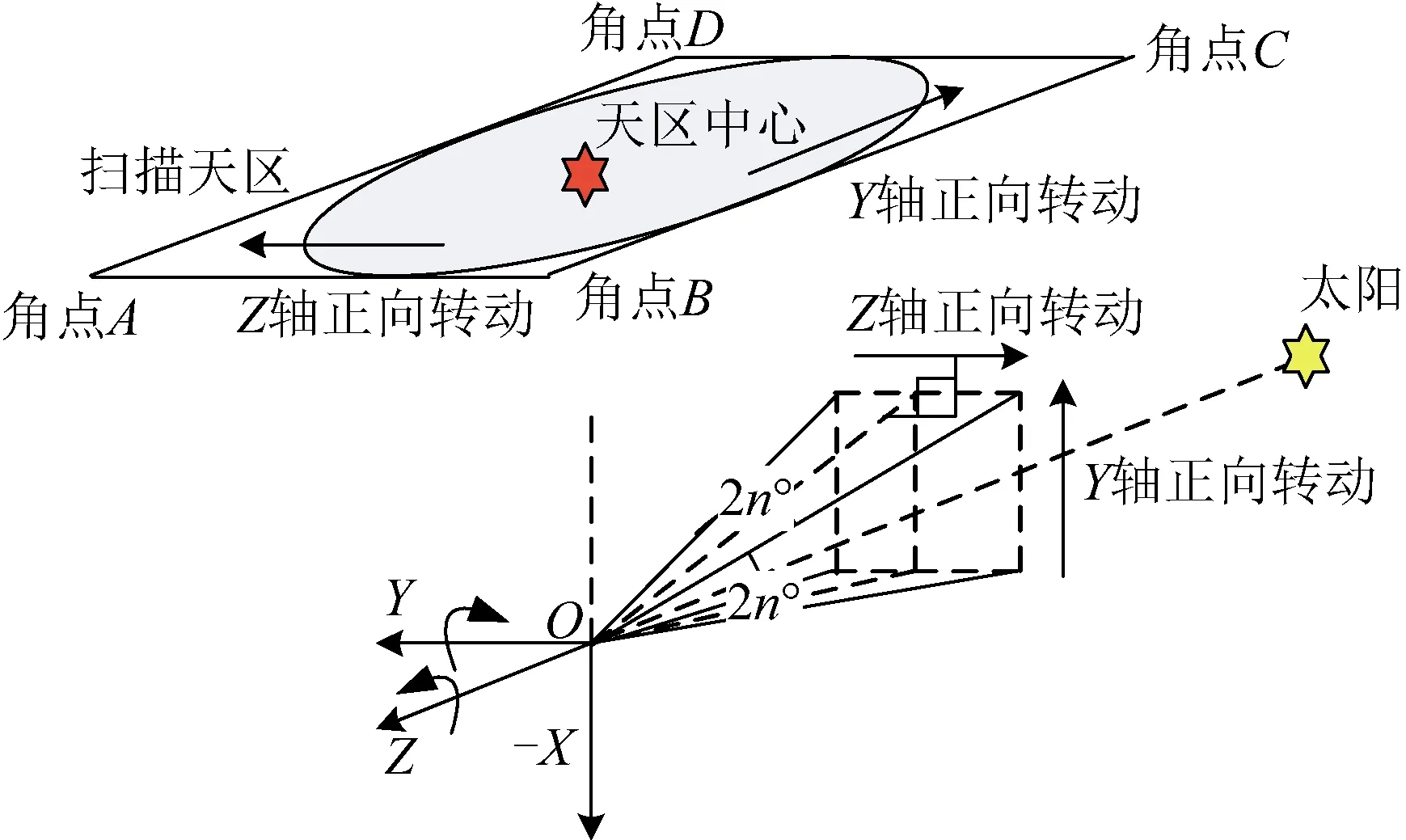
图2 小天区扫描观测原理示意Fig.2 Principle of small sky zone scanning observation
卫星利用星载科学载荷对用户感兴趣的天体目标进行定点或区域扫描观测。其中,利用小天区成像扫描观测,完成对银核等重要天区的深度成像观测。小天区扫描观测模式是对惯性空间中一个n°(n≤11)角半径的圆区域进行深度成像观测,见图2,其观测中心位置、扫描半径以及扫描速度、扫描行间距等扫描参数由用户根据需求确定。扫描观测时间通过扫描参数计算得到,从几小时至几天不等[14-16]。卫星设计动中探测模式,通过整星姿态机动过程中开启载荷工作实现深度小天区扫描。
2 整星测试环境设计
传统姿态机动测试系统以针对静态成像方式为主,通过地面注入固定的姿态机动目标角度,从整星下传的姿态遥测数据判断星上算法设计的正确性。相对传统测试系统,空间科学卫星动中探测过程对测试验证提出了新的要求:
1)姿态机动时刻与载荷工作实时关联要求:传统静态的时刻注入方式无法满足动中探测姿态信息与目标任务之间的动态时序关系。
2)以惯性空间定向为基础的动力学仿真模型:传统对地观测动力学模型无法适应空间观测任务。
3)测试数据分析与指标符合性判读的实时性与直观性要求:传统的数据分析方法在对卫星姿态机动能力评估时,主要进行遥测数值或曲线判读分析,重在对机动时间和稳定度指标上的考核,不能直接显示卫星在空间环境中的运行状况,数据判读可观性差,对动中探测过程中的姿态路径规划、扫描条带与预期效果吻合度等系统效能评估无法实时有效判读。
针对上述问题,设计了适用于惯性空间定向空间探测卫星动中探测姿态机动测试系统,该系统由闭环仿真平台、自动化测试平台和三维显示判读平台三部分组成,如图3所示。各部分主要功能描述如下:
1)闭环测试平台:设计卫星惯性空间定向姿态轨道动力学,经星地接口采集星上执行机构输出信号,通过动力学模型模拟星上环境变化,计算并输出敏感器信号,信号经过调理后发送至敏感器;同时,地面动力学、导航仿真器与星上测控、控制共同建立星地时间统一系统,以实现星上与地面闭环测试时序高度统一。
2)自动化测试平台:开展测试用例的自动化编制与执行,保证机动测试与载荷任务执行时序统一。其中STS3000为新一代智能化测试平台。
3)三维显示判读平台:基于STK与Matlab软件的双向通讯技术,开发了基于STK的实时遥测可视化判读系统。实时数据驱动下利用STK实现了遥测数据直观、简洁的可视化演示,给测试人员和设计人员以更形象的理解,实现航天器测试数据可视化实时三维判读。
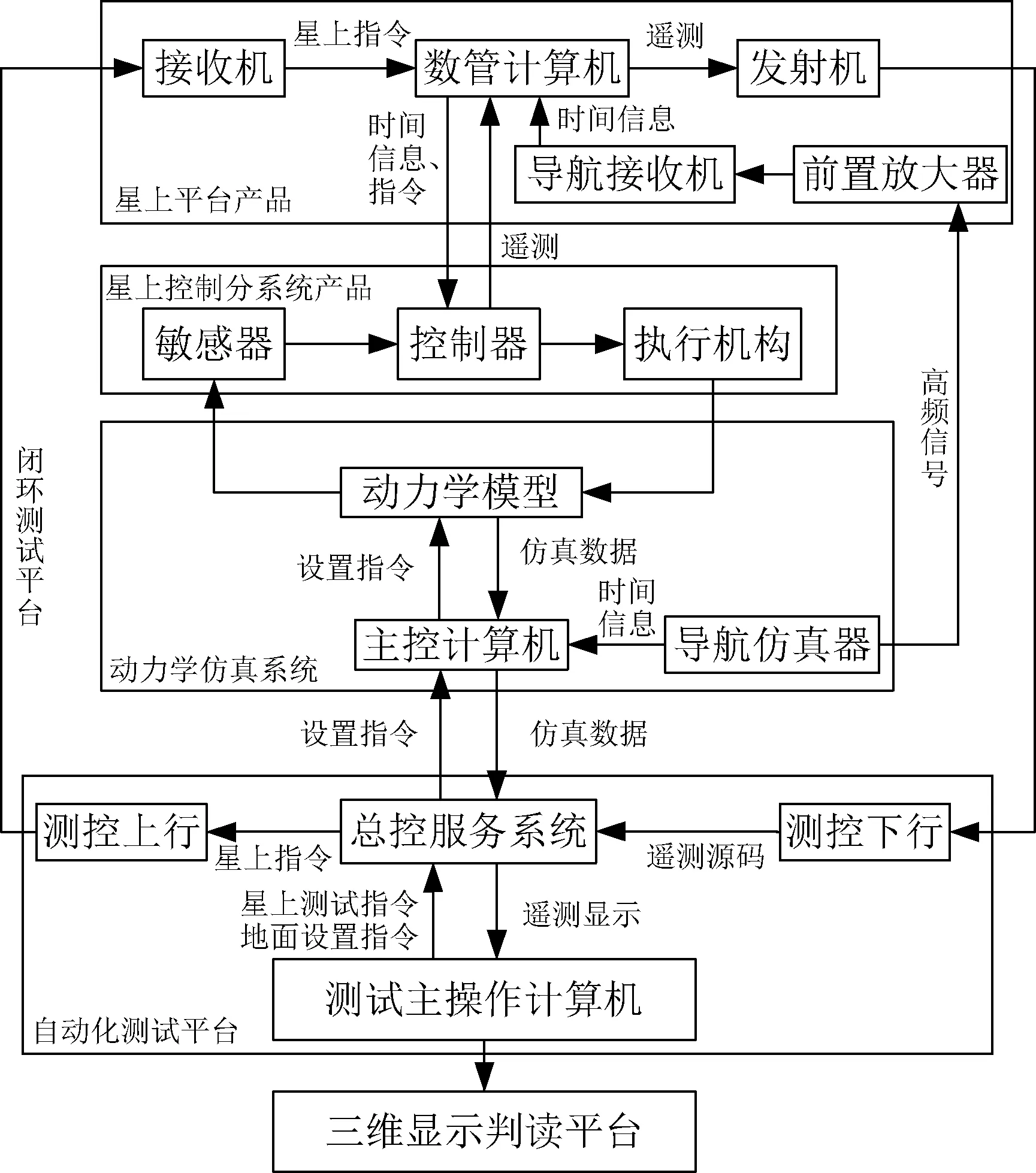
图3 动中探测测试系统信息流图Fig.3 Information flow of dynamic-exploration test system
各部分相互协调工作,完成姿轨控闭环测试、时间同步、测控通道和数据判读分析四部分功能:
1)姿轨控闭环测试系统:动力学计算机负责星体动力学仿真,并将仿真结果与星上产品进行实时交互,与星上控制产品形成闭环。
2)时间同步系统:以导航仿真器为核心,模拟导航卫星在轨运行信息,将时间信息同时发送给主控计算机与星上导航接收设备,并通过数管发送给控制分系统控制器,由此建立动力学模型与星上控制器之间的时间同步系统。
3)遥测遥控闭环通道系统:总控服务器为测控通道地面核心设备,负责将指令发送给星上设备及地面闭环设备,同时解析接收下星遥测,并进行数据分析;数管计算机为测控星上部分核心设备,负责将指令分发给相应设备,同时收集各分系统遥测信息,发送至地面系统。
4)数据分析判读系统:测试主操作计算机为人机交互界面和可视化判读平台,测试人员通过操作计算机进行与总控服务系统进行通讯,完成指令发送与遥测判读任务,以及三位实时场景判读任务。
2.1 惯性空间定向目标姿态模型
小天区扫描模式要求控制星体+X轴指向局部天区进行逐行扫描,因此目标坐标系随时间变化。如图2所示,定义局部天区大小为A×B;定义l为给定的空间指向(卫星质心指向局部天区中心的方向矢量),s为卫星质心指向太阳的方向矢量,扫描角速度为 Δω,则小天区扫描模式的目标坐标系为:
局部天区中心目标坐标系相对于惯性系的方向余弦阵为:
式中:(X)ECI为矢量X在惯性系上的投影。
局部天区中某一点的目标坐标系相对于惯性系的方向余弦阵为:
Cti=Cy(-B/2)Cz(-A/2)Ct
式中:Cz,Cy分别为目标点相对于天区中心绕星体Z轴和Y轴旋转的方向余弦阵。
记ΔA,ΔB为绕星体Z轴和Y轴旋转的角度, Δt为控制周期,则扫描逻辑为:
ΔA=ΔA+Δω·Δt,ΔB=ΔB+Δω·Δt
下一时刻目标坐标系相对与惯性系的方向余弦阵为:
Ct2i=Cz(ΔA)Cy(ΔB)Cti
2.2 星地时间统一设计
为了满足姿态机动时刻与载荷工作实时关联要求,设计了由BD2和GPS组成的高动态时间信号模拟源。主要用于整星校时,并为整星提供高精度的定位、定轨数据,以提高遥感数据事后分析的精度要求。通过BD2-GPS高动态信号模拟源可以模拟产生高动态的GPS L1/L2和BD2 B1/B2/B3卫星导航信号,从而完成对GPS接收机和BD2接收机的性能指标测试,同时还能满足遥感卫星在整星电测期间的模飞测试需求。该设备能够对导航接收机的信号捕获能力以及整星电测期间星上设备的定位、定轨精度进行验证。
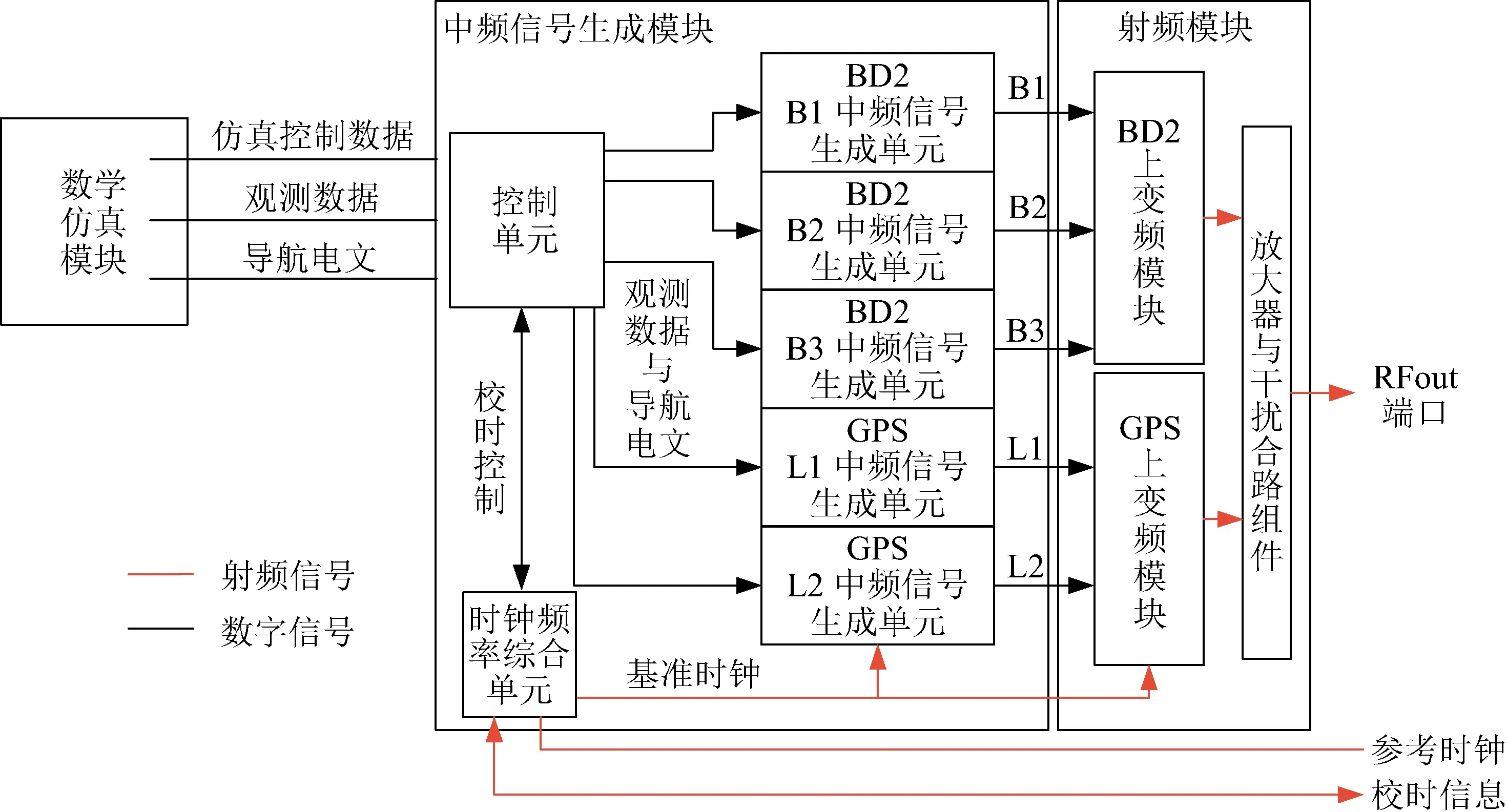
图4 时间信号模拟源信息流图Fig.4 Schematic diagram of time signal simulation source
模拟源由数学仿真模块、中频信号生成模块和射频模块组成:
1)数学仿真模块:时空系统仿真,包括时间系统的仿真和坐标系统的仿真;载体轨迹仿真,模拟载体的运动,并生成载体的坐标轨迹数据,能够根据输入的目标高动态运动特性模拟高动态对导航接收机的影响;轨道摄动仿真,根据卫星在围绕地球运动的过程中受到多种作用力的影响;载体运动仿真,主要仿真载体运动轨迹信息与载体姿态信息;星座仿真:主要实现BD、GPS系统卫星导航的仿真,仿真卫星以及载体的运动姿态,空间环境等信息。
2)中频信号生成模块:能够产生独立的BD2 B1、B2、B3频点的中频信号;能够产生独立的GPS L1、L2频点的中频信号。由BD2中频信号生成单元、GPS中频信号生成单元、控制单元和时钟频率综合单元组成。
3)射频模块:完成将中频输入的BD2 B1、B2、B3频点QPSK扩频调制信号,GPS L1、L2频点QPSK信号进行上变频处理、功率调整,最终得到相应的射频信号。
2.3 实时遥测可视化判读设计
可视化判读系统以成熟的STK仿真软件作为演示环境,在Matlab中处理机动过程遥测,并发送给STK相关演示指令,利用Matlab与STK之间的接口模块[17-18],驱动STK运行,实现姿态机动过程实时场景显示。STK与Matlab的通信主要是通过两个模块,其中STK/Connect模块提供了一种使用客户机/服务器端方式连接STK的快捷工作方式。STK/Connect设计用于给第三方的应用程序提供一个向STK引擎发送指令和接收数据的通信路径。STK/Connect允许打开Microsoft COM或者TCP/IP到STK的连接,发送STK/Connect指令,接收STK的数据,完成后关闭连接。STK/Connect也提供一个消息功能以用户定义的方式来输出错误和诊断信息。另外,STK本身的STK/Matlab接口在STK和Matlab之间提供了一个双向的通信路径,在Matlab工作区通过Connect模块以TCP/IP协议代开STK端口。利用超过150个Matlab指令,如使用STK支持的分析功能一样,Matlab的用户可以使用STK的功能对轨道、弹道、轨迹进行建模与分析。整个系统的结构如图5所示。
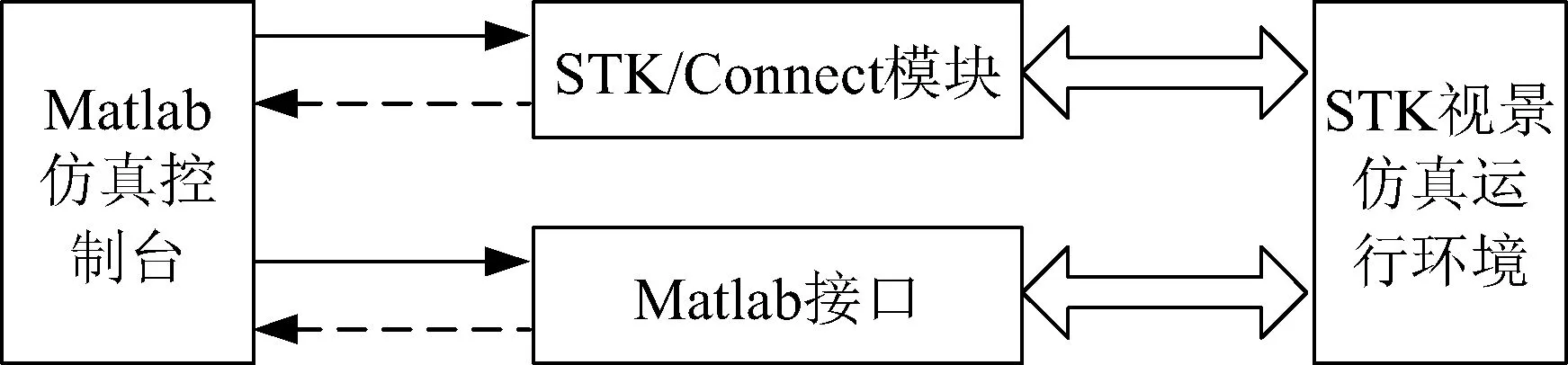
图5 Matlab与STK连接的系统结构Fig.5 System structure of connected Matlab and STK
3 整星姿态机动方案验证
采用本文设计的整星级测试方案,对动中探测姿态机动模式进行验证。以机动到某目标位置并进行小天区扫描为例:目标赤经-5.678°,赤纬-11.45°,扫描速度0.06(°)/s,间隔0.1°,边长5°。
图6为动中探测机动过程中截取的三维实时显示场景效果图像,能直观判断机动过程。图7为小天区扫描过程,机动到目标位置(-506 78°,-11.45°)后,以0.1°间隔进行扫描,边长为5°,扫描到位后返回反向扫描,与设计状态一致。图8为扫描过程中的行扫角速度,与设计值一致。

图6 机动过程三维显示Fig.6 Attitude maneuver 3D display
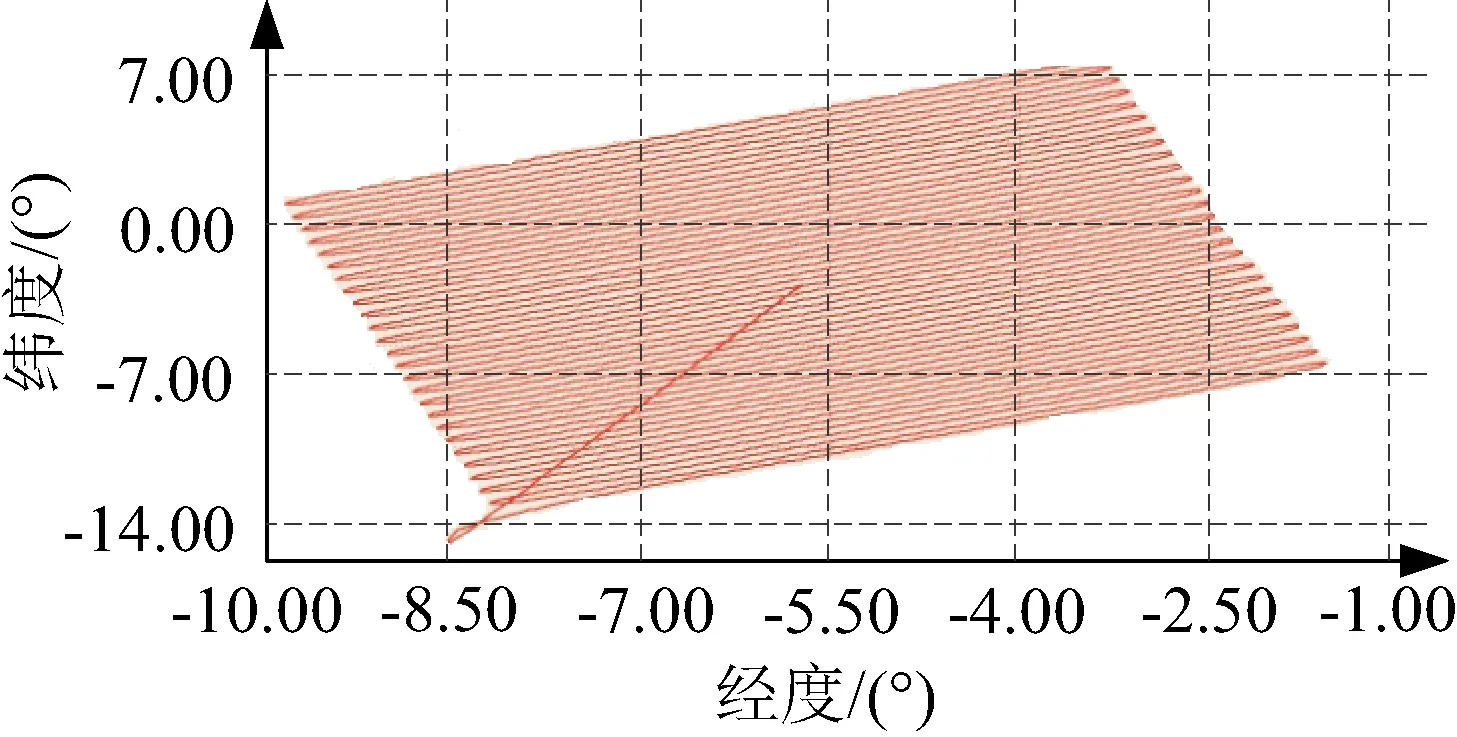
图7 行扫过程Fig.7 Scanning process
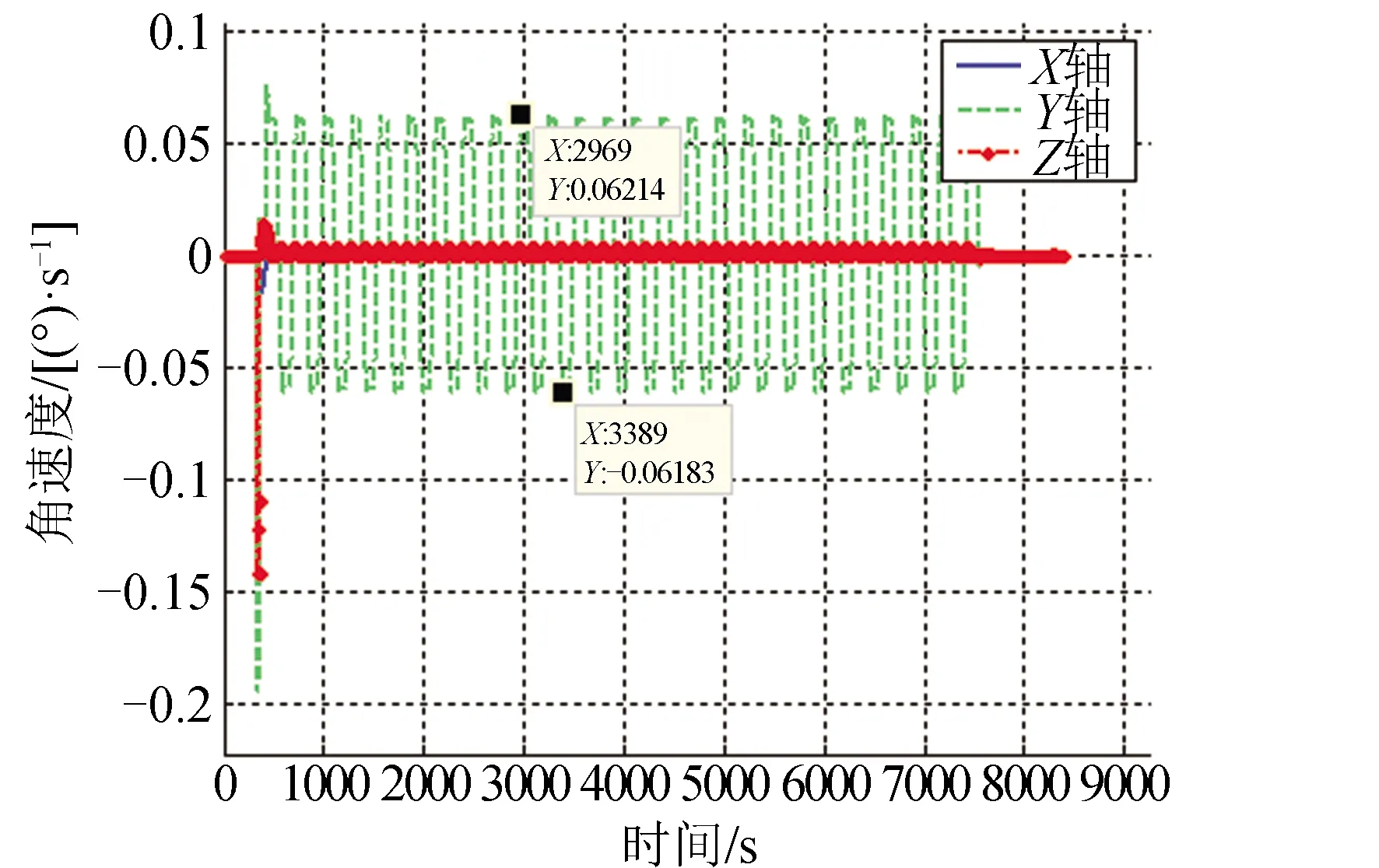
图8 行扫角速度Fig.8 Scanning angular velocity
4 结束语
本文针对天文观测空间科学卫星动中探测技术设计了系统级测试方案,建立了惯性空间目标姿态计算算法、星地时统系统和可视化显示系统,以有效验证动中探测机动功能性能与在轨使用需求的符合性。经整星系统级测试试验验证可知,该方案提升了姿态机动测试系统的适用性和判读直观性,可对动中探测机动功能进行全面验证,测试覆盖性全面,测试数据充分、有效,可为后续空间科学卫星姿态机动测试提供理论和实践参考。
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
学生天地(2020年3期)2020-08-25 09:04:16
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
太空探索(2016年3期)2016-07-12 09:58:35
太空探索(2016年1期)2016-07-12 09:56:05
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
航天器工程(2014年2期)2014-03-11 16:35:24