
基于点云数据的井下矿巷道岩体结构特征分析
2020-11-23 06:59田迎春李文马东陈小伟李宗武谢盛青宫国慧王恒涛
中国矿山工程 2020年5期
田迎春, 李文, 马东, 陈小伟, 李宗武, 谢盛青, 宫国慧, 王恒涛
(1.鞍钢集团矿业弓长岭有限公司, 辽宁 辽阳 111007; 2.中国恩菲工程技术有限公司, 北京 100038)
1 前言
自然界中岩体内部发育着大量规模和形态各异的结构面,岩体结构面共同影响着工程岩体的力学性质和稳定性,控制着地下结构施工期和运行期的围岩稳定和工程安全。大量工程实践表明,岩体失稳破坏主要沿岩体结构面产生[1]。因此,对岩体结构调查及特征研究具有重要的现实意义。
根据国际岩石力学学会推荐的裂隙描述方法,主要采用8个指标(分别为产状、间距、延续性、迹长、粗糙度、张开度、充填物、地下水)对岩体节理进行定量或定性描述。其中,岩体结构面的优势产状和几何信息是评价岩体结构面发育的重要指标[2]。传统岩体结构面特征采集大多是以现场地质工程师采用皮尺、地质罗盘、游标卡尺等基础工具在现场接触测量,需要直接暴露在裸露岩体之下,存在一定的安全风险(塌方);而且调查过程耗时长,不能满足快速作业需要。此外,地质素描结果很大程度上取决于人的主观判断以及相关经验。随着科学技术的发展,以摄影测量和激光测量为代表的现代数字技术开始应用于岩体工程结构面信息采集,其优点主要有:(1)可以快速高效、非接触地进行岩体信息采集,特别是对于人员难以接触或靠近的区域。(2)采集的信息易于保存和共享[3]。三维激光扫描技术可以实现远距离、大范围、高精度的获取岩体三维点云数据实现三维重构,是岩体结构面信息采集的重要技术手段。国内外学者[4-5]在这方面已开展了较多研究。刘昌军等[6]应用三维激光测量技术获取高陡边坡的高密度点云坐标数据,建立高边坡表面模型并提取了高陡边坡的岩体结构面的产状和几何信息数据。荆洪迪等[7]应用三维激光扫描技术与地质构造分析相结合的研究手段,将岩体结构面信息提取和三维激光扫描技术进行了系统集成。葛云峰等[8]采用三维激光扫描技术获取岩体露头点云数据,利用改进的区域生长法与解析几何理论实现了岩体结构面智能识别与信息提取。
弓长岭井下矿是我国最早开采的大型地下铁矿山之一[9],在生产过程中曾试用过多种采矿方法,现阶段主要采用无底柱分段崩落法开采,分为西北区、中央区和东南区。由于当前生产过程中井下矿石(尤其是富矿石,品位>65%)回收率低(50%左右)严重影响矿山经济效益,需要对井下矿回采方法进行优化。为了有效指导弓长岭井下矿采矿方法优化研究,通过开展井下岩体结构调查及特征分析,为井下矿岩体质量及稳定性评价提供基础数据,指导矿山采矿设计及后续施工。
2 工程概况
弓长岭井下矿地处辽宁省中南部,矿区位于弓长岭背斜北翼,西北至寒岭断裂,全长4 850m,宽750m,面积3.6km2。矿区矿体为沉积变质型磁铁矿,主要采用无底柱分段崩落法开采,阶段高度60m,分段高度12m。弓长岭井下矿富矿体主要分布在中央区-220m水平以下,目前正在开采的-280m中段富矿体沿走向长约1 550m,矿体厚度18~57m,倾角71°~81°,平炉富矿品位在65%以上,高炉富矿品位在55%以上,经济价值高。现有采矿方法在回采过程中富矿回收率仅50%左右,造成大量富矿损失于地下,亟需对现有采矿方法进行优化改进,提高富矿回收率。
为了指导矿山开展采矿方法优化设计,需要对区域岩体结构特征有深入了解,以保障巷道工程及采场结构稳定性。根据矿石矿体赋存条件以及现阶段生产现状,初步拟定针对-280m水平巷道开展岩体结构调查,调查巷道兼顾穿脉和沿脉,总长度约450m。图1所示为水平巷道工程平面布置。
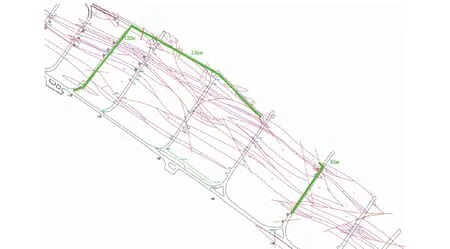
图1 弓长岭井下矿-280m水平巷道工程平面布置
3 技术方法
3.1 三维激光扫描技术
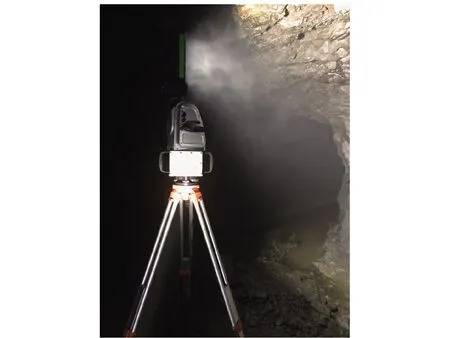
图2 三维激光扫描仪
三维激光扫描是利用一组脉冲激光测距仪主动发射激光并获取来自物体表面的反射信号进行连续点测量方法。由于其获取的激光点云数据信息量大、精度高、速度快等特点,现被应用在了建筑、隧道、矿山等众多行业。目前国内外均有较成熟的产品,本次矿山井下调查采用澳大利亚Maptek公司开发的I-Site SR3三维激光扫描仪,具体如图2所示。该扫描仪的垂直扫描范围为-40°至90°,水平扫描范围为360°,数据采集速率为100~200kHz,距离精度为4mm。选装的全景线性数码相机可以与点云同步采集,拍摄角度范围为水平360°,垂直80°,图片像素14 700万。为了适应井下光线昏暗环境,在扫描仪支架上安装有补光照片灯。
3.2 现场测量
本次现场测量工作主要在-280m水平中央区,由于受粉尘、地下水以及闲置时间长等因素影响,部分巷道壁面原生节理裂隙已模糊辨识不清,现场扫描过程中对这些巷道进行了剔除。采用固定站式扫描方法开展了巷道扫描如图3所示,按照如下步骤开展:(1)确定站点并架设三脚架及扫描仪。(2)扫描仪调平及参数设置。(3)扫描及数据存储。(4)移站。扫描过程中站点间距不超过10m。首站点扫描前需进行站点位置确定,即以站点附近巷道中的两个或以上基准点作为后视点进行定位。
3.3 室内数据处理
1)坐标转换
由于激光测量获取的激光点云坐标是相对仪器本身的相对坐标,在进行点云数据三维重构前,需要将相对坐标转换为大地空间直角坐标[7]。在将I-Site SR3三维激光扫描仪获取的点云数据导入到Maptek配套点云处理软件Point Studio中,通过内置的坐标转换程序转换到大地坐标系之中,通过后视基准点坐标进行修正完成首站点定位及后续站点坐标转换。
2)数据拼接与预处理

图4 -280m水平42#站点拍摄的全景图像
井下巷道环境复杂,为了避免扫描视角遮挡产生的盲区,通过控制测站间距使相邻两测站扫描测得的点云数据存在部分重叠,通过Point Studio软件拼接算法将全部测站的点云数据拼接在一起,全面地显示扫描巷道岩体结构。在井下巷道扫描过程中,由于光线、遮挡、振动等因素的干扰,不可避免会产生一些无关数据点,需要对这些噪点数据进行剔除预处理。
3)结构面识别与产状信息获取
基于拼接完成的巷道点云模型,为了便于对巷道壁面结构面的观察和识别,通常需对三维点云模型进行剖面切割以及视角转换等操作,通过对结构面处部分点云进行框选软件可自动识别结构面,进而通过平面法向量求得结构面产状。将获取的结构面几何信息(迹长、间距、产状和空间分布)进行分组和分类,确定优势节理组。
4 结果分析
4.1 基于数字图像的典型结构面特征分析
图4所示是三维扫描过程中全景线性数码相机拍摄的站点360°全景图像,该图像可采用360°全景浏览工具进行查看,实现将现场实际场景在室内复原,同时可与点云数据建立的巷道模型对照进行结构面识别验证。图5所示是井下矿-280 m水平巷道扫描过程中拍摄的部分典型岩体结构面。图5a所示岩体被倾斜节理切割成似层状,节理裂隙发育(可达8~10条/m),岩体完整性较差。图5b中所示岩体中含一夹层,可见明显的夹层面。

图5 井下巷道岩体典型结构面
4.2 结构面特征分析
图6所示是基于Point Studio软件建立的三维激光扫描点云巷道局部模型,基于巷道模型开展结构面识取。图7所示图中标识了部分识别的结构面及结构面产状信息。通过对全部扫描巷道进行结构面识别并提取节理面特征数据汇总见表1。基于节理特征数据,采用DIPS软件绘制了节理极点密度图,具体如图8所示。从图中可以看出,区域节理大致可分为3组优势节理,产状分别为235°∠32°、63°∠70°和195°∠83°,与现场观察结果基本符合。
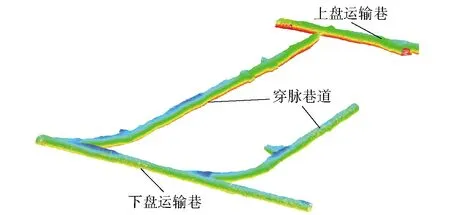
图6 基于点云数据拼接建立的巷道三维模型

图7 井下矿-280 m水平巷道局部点云模型
4.3 巷道支护策略及建议
通过对弓长岭井下矿巷道开展岩体结构特征调查,认为该矿山岩体完整性整体较好,局部节理裂隙发育。大部分巷道可以保持自稳状态无需支护,局部巷道因贯穿断层或软破夹层(绿泥岩)发生垮塌,
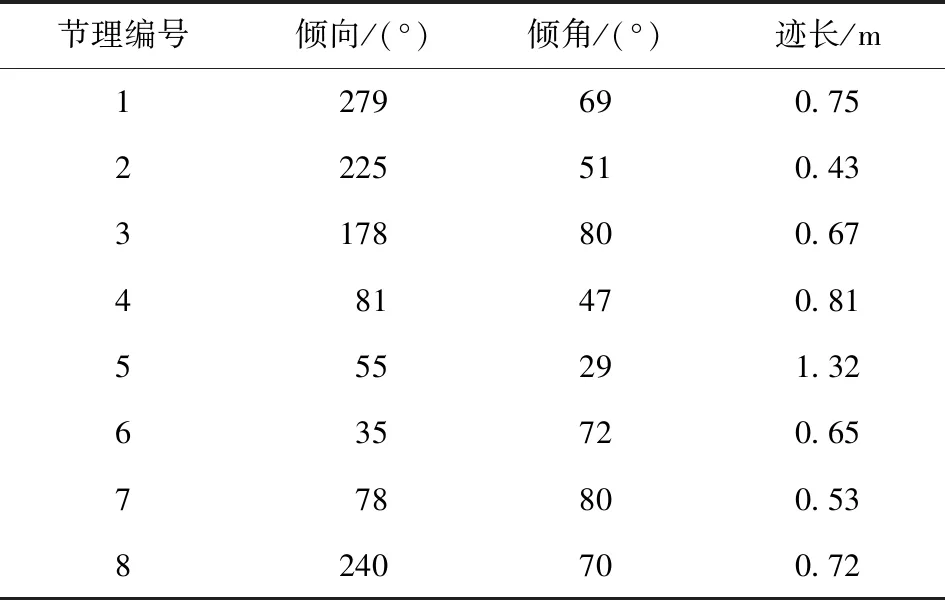
表1 井下矿-280m水平巷道岩体结构面特征统计表
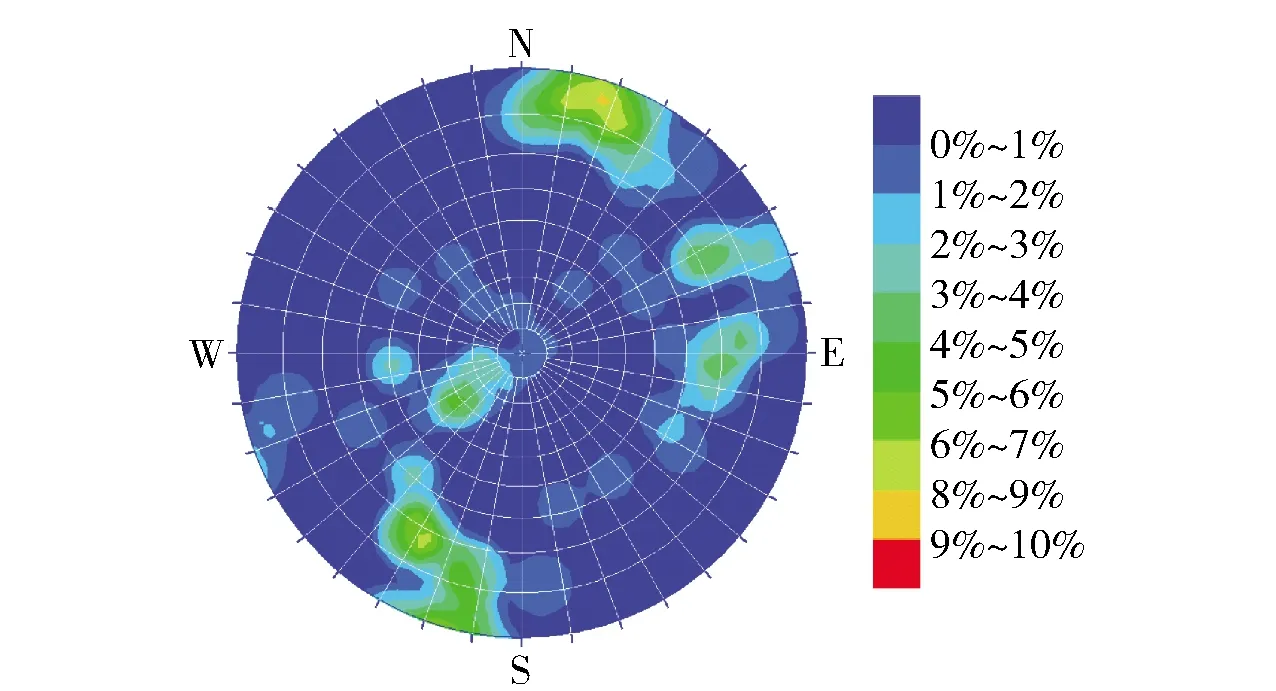
图8 节理极点密度图
采取了钢筋混凝土衬砌或金属拱架支护;部分与节理面走向平行的沿脉巷道因节理倾角陡立且呈层状,存在片帮风险采用了锚杆支护。以上支护措施在弓长岭井下矿日常生产过程中解决上述特殊岩体结构时起到了较好的效果,建议在后续的巷道及其他岩体工程施工过程中应进行超前钻孔探测,通过钻孔岩芯了解工作面前方岩体结构特征,为钻爆参数优化、及时制定合理支护方式提供依据,避免因爆破参数不合理导致的巷道壁面岩体过度损伤以及支护处理措施不及时导致的工期延误影响正常生产。
5 结论
弓长岭井下矿是一座采用无底柱分段崩落法开采的铁矿山,高品质富矿有效回收是矿山经济效益的有利保障。为了开展深部富矿高效回采方法优化研究,需要对区域岩体结构特征有深入了解。本文通过采用三维激光扫描方法对井下矿-280m水平主要巷道进行了扫描并识别提取结构面特征,得出以下结论:
(1)三维激光扫描技术可有效提高井下矿山岩体结构调查作业效率及安全性,值得在地下矿山中推广应用。
(2)扫描区域巷道优势节理可分3组,产状分别为235°∠32°、63°∠70°和195°∠83°。
(3)弓长岭井下矿区域岩体结构以节理面为主,部分区域受断层或软破夹层影响稳定性较差,需采取加强支护。
猜你喜欢
力学学报(2022年9期)2022-10-05
油气·石油与天然气科学(2021年7期)2021-09-10
合肥工业大学学报(自然科学版)(2021年8期)2021-09-06
有色金属(矿山部分)(2021年4期)2021-08-30
防灾科技学院学报(2021年1期)2021-03-23
矿产勘查(2020年8期)2020-12-25
矿产勘查(2020年6期)2020-12-25
科技和产业(2020年11期)2020-12-09
大众科学·上旬(2020年4期)2020-10-21
铁道建筑技术(2020年11期)2020-05-22
