多模式声呐技术在云溪水库淤泥探测中的应用研究
2020-11-19 06:02高建华余修毕
工程地球物理学报 2020年5期
彭 军,高建华,王 鹏,李 欢,余修毕
(水利部 长江勘测技术研究所,湖北 武汉 430011)

图1 多模式声呐系统组成示意图Fig.1 Multimode sonar system schematic diagram
1 引 言
随着经济的发展,技术人员对于水域中的调查研究越来越多,例如: 河流、湖泊、港口以及近岸的地球物理调查、淤泥沉积和侵蚀研究、沉积物性质和底部结构调查、地震和测深综合调查等[1]。针对不同类型的工程,所进行的水域探测的目的和要求是不同的,例如探测深度、分辨率等,因此所用的仪器设备也是不同的。常见的设备主要有多波束测深系统、侧扫声呐系统、浅地层剖面系统以及地震剖面测量系统等[2]。其中,前2种仪器主要用于水下地貌表面特征的勘探测量,便于形成地形图,可在较大区域范围内对工程场地条件等进行评价;而浅地层剖面仪系统可以将水域范围内具有一定厚度的淤泥反映出来,有利于人们对水底淤泥污染有更充分的认识[3]。
本文利用的多模式声呐系统能有效地将侧扫声呐和浅地层剖面系统相结合,解译互相印证,大大地提高了效率。该系统具有控制声波传输方式(例如:脉冲长度、频率、波形等)的强大功能,从而能接收高质量的回声信息,对于来自各种声源发射的不同频率的声能信号,经过软件处理可以自定义地生成剖面成果图。同时,它还能将这些声能信号和对应的包括实时导航的各类数据同步储存起来,给后续成果解译提供较大的便利。
2 多模式声呐系统工作原理
多模式声呐系统主要由PC(测量计算机)、声学子系统和GPS定位设备三部分组成,三部分功能各不相同,其中PC是用来系统控制及数据采集,声学子系统用来生成和接收不同频率的声学信号,GPS定位设备是用来提供位置信息,声学子系统包括浅地层剖面系统、侧扫声呐系统和地震子系统,组成示意图如图1所示。
2.1 浅地层剖面仪工作原理
浅地层剖面仪的工作原理是通过声源发射声脉冲信号,声脉冲穿透水底,在遇到不同的声阻抗反射界面时返回信息数据,返回信号被水听器接收,接收的信号经过合适的数据处理模块,最后形成声学剖面图形来反映地层垂向结构和性质[4]。和单脉冲的水深仪工作原理相似,浅地层剖面仪依靠自身的换能器周期性的向地下发射声能信号,信号在传播过程中遇到首个强声阻抗界面即水底时,部分脉冲信号会因为反射作用提前被设备接收单元采集,剩下的声能信号则会透过水底界面继续向深层的介质进行传播,在碰到下一个声阻抗界面时,则会重复前面的过程,一些声能信号返回到设备的接收单元,余下的声能信号继续向下传播,如此不断重复,直到声能信号被完全耗尽,最终无法被仪器的接收单元记录[5]。
声能信号在碰到声阻抗界面时就会发生反射,反射能量强弱由介质的反射系数R决定。
其中,ρ1,ρ2分别表示第一层和第二层介质的密度;v1,v2分别表示第一层和第二层的速度。根据上述公式可以看出,声强反射发生的条件是介质必须要有较大的密度和声速差,即当反射系数趋近于0 时,两层的相邻界面就会几乎无法产生无声强反射,而当反射系数趋近于1时,两层的相邻界面就会产生较强的声强反射,在经过适当的数据处理之后,浅地层剖面仪接收单元会反映灰度较强的剖面的界面线。
这次应用的多模式声呐系统中的是Chirp浅地层浅剖仪,与常规的浅地层剖面仪相比,它最大的优势是采用了Chirp波和连续波(CW)技术,Chirp系统通过选择各种波形并依靠强大的处理能力,最终可以得到地层浅部和深度的高精度剖面[6]。Chirp波指的是线性调频信号,它通过对载波频率进行调制以增加信号的发射带宽并在接收时实现脉冲压缩。所以它的特点是频带宽、脉冲长。为了解决理论Chirp波中太多频率成分在同一界面处的反射波对信号分辨的影响,在实际应用过程中,还需要结合相关的包络函数,比如经常会用到的SINC函数等,这些包络函数的应用可以使Chirp波中的某些主要频率成分得到提高,某些次要频率成分得到压制。而且,由于仪器的采集单元接收的信号与发出的Chirp波信号相似度较高,线性噪音则不具备这种相似度,因此利用合适的处理单元对获得的信号进行卷积处理,就能达到提高信噪比、降低噪声的目的[7]。本次浅地层剖面仪分为高频和低频两部分,高频部分频率为10~20 kHz,低频部分频率为2~9 kHz,最大分辨率为0.3 m。
2.2 侧扫声呐工作原理
侧扫声呐是通过向两侧发射声能信号来探测水底界面声学结构和介质性质的仪器,实际工作过程中,一般会在拖鱼探头的两侧各安装一条换能器线阵,首先换能器探头会发射一个短促的声能信号,该声能信号会以球面波的形式向外界传播,在遇到水底或者障碍物的时候,根据波的传播特性会产生散射,其中的反向散射波(也称回波)会按照发射时的传播路径返回到换能器的接收单元储存下来,经过换能器的处理单元转换成为一系列的电脉冲信号[8]。正常情况下,对于平滑的、软的、凹陷的水底结构回波较弱;粗糙的、硬的、凸起的水底结构回波较强,因为障碍物被遮挡的区域则不会产生回波,而且,距离探头越远的区域回波越弱。如图2所示,换能器在第1点发射短促的声脉冲,在换能器正下方的水底为第2点,由于回波点是垂直入射的,发生正反射,就会得到很强的回波信号。而水底界面从第4点开始出现凸起的特征,第6点为最高点,因此第4、5、6点之间的区域回波较强,由于这3个点当中,第6点到换能器的距离最近,第4点最远,所以在换能器接收到的回波信号依次是第6点、第5点和第4点,这也充分的说明了由于平距和斜距的不同,会造成回波强度的不同。由于第6点和第7点的区域被凸起的水底所遮挡,因此该区域是不会产生回波的。而对于第8点和第9点,它们之间的水底由于凹陷也是被遮挡住,因此也不会产生回波,在主机单元显示的会是影区。

图2 侧扫声呐回波示意图Fig.2 The schematic diagram of side scan sonar echoes
当换能器接收单元采集到不同强度的电脉冲信号后,就可以利用专业的处理软件进行处理,最后这些信号就会转变成为数字量,在显示器上显示出来[9]。根据回波幅度的不同,每一个点对应的亮度也会不同,这些点显示的位置和回波到达的时间相对应,最终每一次的回波数据都会在显示器上成为一条横线,每一个发射周期内的电脉冲信号按规律纵向排列,就形成了二维的水底地貌声学成果图影像[10]。声学成果图上的亮度包含了水底界面介质的特征,而且这些特征信息与水底平面呈逐点映射的关系,方便技术人员更好地了解水底地貌结果特征。利用侧扫声呐的“拍照”功能,可应用于水底底质分类、水底矿产资源评价、障碍物探测和地质灾害调查等,本次侧扫声呐系统的工作频率为100~400 kHz。
2.3 浅地层剖面和侧扫声呐交互解译原理
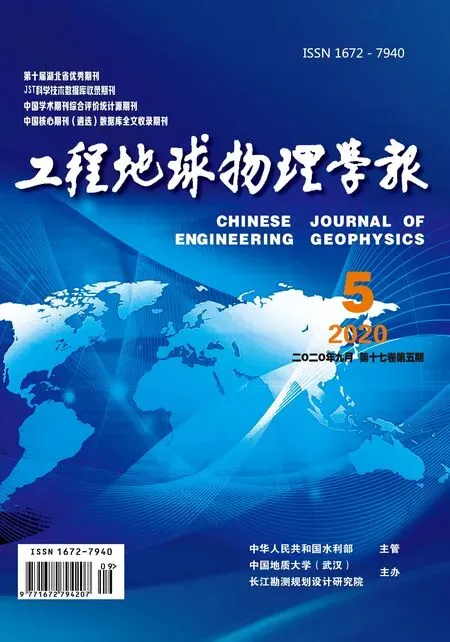
对于多模式声呐采集系统,提供一种各系统之间的交互解译功能。浅地层剖面法和侧扫声呐法数据同时采集,并且可以实时同时显示数据,利用侧扫声呐和浅地层剖面软件的交互解释功能可以看出,在侧扫声呐投影图上淤泥覆盖的地方,浅地层剖面对应的位置会比较光滑(如图3左所示),在水底有基岩出露的地方,浅地层剖面图对应的位置起伏不平(如图3右所示),以此特征来判断水底界面是否有淤泥覆盖和分辨淤泥厚度。
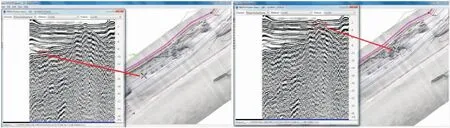
图3 浅地层剖面与侧扫声呐交互解释Fig.3 The result of sub-bottom profile and side scan sonar interactive interpretation
3 云溪水库应用实例
云溪水库位于陆水上游支流菖蒲港分支云溪港上,主坝坝址座落在湖北省通城县关刀镇,距通城县18 km,云溪水库控制流域面积为48.3 km2,总库容4 605×104m3,是一座以防洪、灌溉为主,兼有发电、养殖等水利任务的中型水库。在实际作业前,浅地层剖面仪和侧扫声呐仪器需要进行反复试验,通过设置不同的测试参数,得到对应不同的成像效果,进一步了解不同参数对浅地层剖面图像和侧扫声呐图像成果的影响,来确定最合适的野外作业参数。经过多次试验,确定本次云溪水库的浅地层剖面仪测试频率为2~9 kHz,采样率为20 kSPS(每秒采样千次),采样长度为100 ms,采样间隔为500 ms,侧扫声呐的测试频率为400 kHz,采样率为25 kSPS,两侧扫描范围为80 m。按照计划测线利用多模式声呐系统进行走航式测量,采集侧扫声呐和浅地层剖面数据。
图4 侧扫声呐成果扫描Fig.4 The result of side scan sonar
根据侧扫声呐的处理软件,将侧扫拖鱼左右换能器采集到的数据进行拼接,投影到工区底图上,得到整个区域扫描成果,如图4所示。根据前文介绍的侧扫声呐的工作原理知道,侧扫声呐成果图谱中的声学空白区和表层声学空白层是水底相对比较软的介质,判断为淤泥分布区域,也是本次淤泥探测的主要目标。侧扫声呐成果图中出现的声学空白有两种原因,一种是由于水底地形凹陷,声波无法到达某一位置而形成的盲区;另一种是水底底质为声能强吸收物质,侧扫声呐声波到达该类型介质时,声能大量损耗,几乎无法返回换能器而出现声能空白。对于图像中灰度比较大的区域则是水底相对比较坚硬、粗糙、凸起的介质,判断为基岩。根据此原理,可以得知,水下共有3处基岩隆起,而且基岩边界清晰可辨,左上方的基岩小沟扫描效果也很好,说明该仪器分辨率很高,在水库环境中的应用效果非常好。
选取其中2条测线L2和L4,其浅地层剖面采集成果如图5和图6所示。L2测线浅地层剖面成果图左侧区域明显凸起,且下方未有同相轴出现,根据系统的交互解译功能可以看出,正好对应区域灰度较高,判断是水底的基岩隆起。L2测线浅剖成果图的右侧部分,水底界面较为平缓,下方同相轴明显,声波在其他区域的水底面反射强度明显强于该区域的声波反射强度,图像中出现的约1.5 m厚的声学空白层,判定为淤泥的区域,厚度约为1.5 m。L4测线浅地层剖面成果图中间部分凸起,判断为基岩,两侧较为平缓,侧扫声呐成像图中灰度为白色,推断为淤泥区域,厚度最大约为3 m。
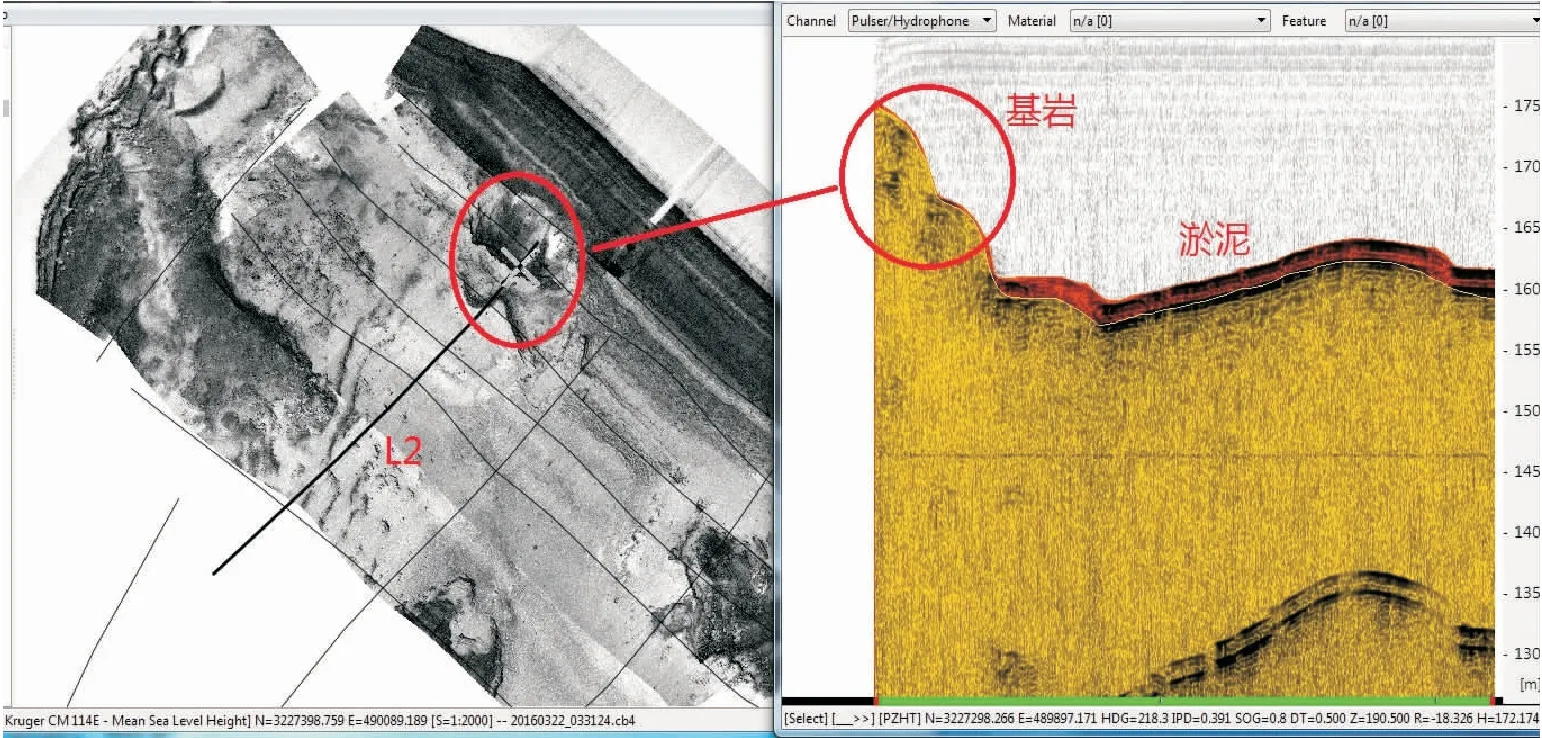
图5 L2测线浅地层剖面仪采集成果(1∶2 000)Fig.5 The result of sub-bottom profile collection(1∶2 000) of line L2

图6 L4测线浅地层剖面仪采集成果(1∶2 000)Fig.6 The result of sub-bottom profile collection(1∶2 000) of line L4
根据上述L2和L4测线的解译流程,可以拾取工区所有测线的淤泥层位,利用专业的解译软件导出淤泥层位的高程厚度信息,这些信息与测线坐标相对应,最后利用Surfer软件绘制得到该区域的淤泥沉积厚度分布图,将得到的淤泥沉积厚度图投影到侧扫声呐结果上,如图7所示。从图7中可以看出,红线是厚度为0的基岩边界线,整个区域内淤泥平均厚度为2 m左右,局部位置最大达到3~4 m,三处隆起的基岩边界与等值线图特征吻合得非常好,说明了浅地层剖面和侧扫声呐相结合的方法在水库淤泥探测中的应用效果显著。在水库中选取采样点,利用美国SDI公司D型电动沉积物采样器对采样点底泥进行全柱状取样,该方法采用柱状透明采样管,全柱状采样可直接观察到淤泥的垂直分布情况,是调查底淤泥厚度的主要手段。其中CYD07采样结果如图8所示,可以看出CYD07点位置淤泥厚度为1.52 m,正好位于淤泥厚度等值线图1.5 m等值线附近,说明了浅地层剖面解译的厚度比较准确。
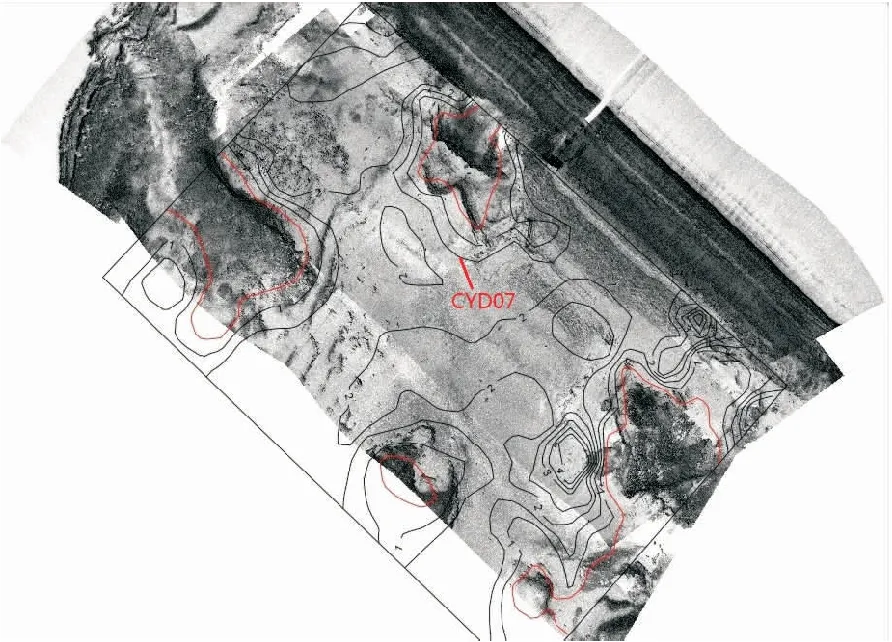
图7 淤泥厚度等值线投影图(1∶2 000)Fig.7 Sludge thickness contour projection(1∶2 000)
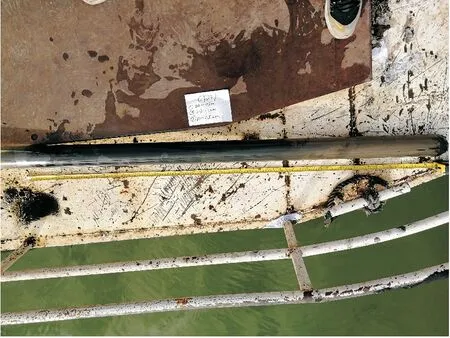
图8 采样点CYD07淤泥厚度Fig.8 Sludge thickness of sampling point CYD07
4 结 论
本文介绍了多模式声呐系统的工作原理以及该技术在咸宁云溪水库淤泥探测的应用效果,得到的结论如下:
1)云溪水库里淤泥的平均厚度约为2 m,局部最大达到4 m左右,分布于水库大坝左前方区域。
2)多模式声呐系统工作稳定,技术手段先进,最大的优势是提供交互解译功能,在水域淤泥探测中的应用效果非常明显。
3)浅地层剖面法确定淤泥的厚度,侧扫声呐法有效的划分水底界面中淤泥和基岩的分布范围,两者相结合,解译互相印证,不仅可以提高探测的效率,还可以极大地增加室内资料解译的准确度。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
声学与电子工程(2021年3期)2021-10-13
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
小朋友·快乐手工(2018年9期)2018-12-20
电子制作(2018年2期)2018-04-18
水下无人系统学报(2017年5期)2017-11-22
雷达与对抗(2015年3期)2015-12-09
语文知识(2015年11期)2015-02-28